
8.9 Matrices inversas



- Última actualización
- 30 oct 2022
- Guardar como PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Dos números son inversos multiplicativos si su producto es 1. Cada número además del número 0 tiene una inversa multiplicativa. Para las matrices, dos matrices son inversas entre sí si se multiplican para ser la matriz de identidad.
¿Qué tipos de matrices no tienen inversas?
Inversos de Matrices
Las inversas multiplicativas son dos números o matrices cuyo producto es uno o la matriz de identidad. Considera una matrizA que tenga inversaA−1. ¿Cómo encuentras matrixA−1 si solo tienes matrixA?
A=\ left [\ begin {array} {ccc}
1 y 2 y 3\\
1 & 0 & 1\\
0 y 2 y -1
\ end {array}\ right], A^ {-1} =?
La respuesta es que aumentas la matrizA con la matriz de identidad y la fila reduce.
[12310010101002−1001]
R1⋅−1+R2→[1231000−2−2−11002−1001]R2+R3→[1231000−2−2−11000−3−111]R2÷−2→[12310001112−12000−3−111]
R3÷−3→[12310001112−12000113−13−13]
R3⋅−3+R1→[12001101112−12000113−13−13]
R3⋅−1+R2→[12001101016−161300113−13−13]
R2⋅−2+R1→[100−13431301016−161300113−13−13]
La matriz de la derecha es la matriz inversaA−1.
A−1=[−13431316−161313−13−13]
Las fracciones suelen ser inevitables cuando se computan inversas.
Una razón por la que las inversas son tan poderosas es porque te permiten resolver sistemas de ecuaciones con la misma lógica que resolverías una sola ecuación lineal. Considera el siguiente sistema basado en los coeficientes de matrizA desde arriba.
x+2y+3z=96x+0y+z=360x+2y−z=−12
Al escribir este sistema como una ecuación matricial obtienes:
[12310102−1]⋅[xyz]=[9636−12]
A⋅[xyz]=[9636−12]
Si esta fuera una ecuación lineal normal donde tuvieras una constante multiplicada por la variable es igual a una constante, multiplicarías ambos lados por la inversa multiplicativa del coeficiente. Haz lo mismo en este caso.
A−1⋅A⋅[xyz]=A−1⋅[9636−12]
[xyz]=A−1⋅[9636−12]
Todo lo que queda es que sustituyas y realices la multiplicación matricial para obtener la solución.
[xyz]=A−1⋅[9636−12]
[xyz]=[−13431316−161313−13−13]⋅[9636−12]
[xyz]=[−13⋅96+43⋅36+13⋅(−12)16⋅96−16⋅36+13⋅(−12)13⋅96−13⋅36−13⋅(−12)]
[xyz]=[12624]
Ejemplos
Anteriormente, se le preguntó qué tipos de matrices no tienen inversas. Las matrices no cuadradas generalmente no tienen inversas. Las matrices cuadradas que tienen determinantes iguales a cero no tienen inversas.
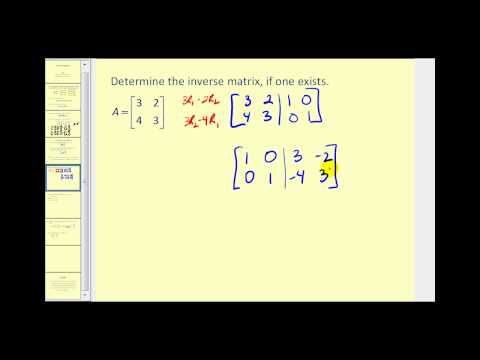
Encuentra la inversa de la siguiente matriz.
[16424]
[161042401]
R1⋅−4+R2→[161000−41]
Esta matriz no es invertible porque sus filas no son linealmente independientes. Para probar para ver si una matriz cuadrada es invertible, verifique si el determinante es cero o no. Si el determinante es cero entonces la matriz no es invertible porque las filas no son linealmente independientes.
Confirmar matrizA yA−1 son inversos por computaciónA−1⋅A yA⋅A−1.
A=[12310102−1],A−1=[−13431316−161313−13−13]
A−1⋅A=[−13431316−161313−13−13]⋅[12310102−1]
a11=−13⋅1+43⋅1+13⋅0=1
a22=16⋅2−16⋅0+13⋅2=1
a33=13⋅3−13⋅1−13(−1)=1
Tenga en cuenta que el resto de las entradas resultan ser cero. Esto queda para que lo confirmes.
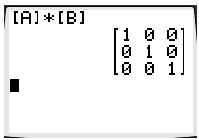
Usar una calculadora para calcularA−1, computarA−1⋅A, computarA⋅A−1 y computar
A−1⋅[9636−12]
Comience ingresando solo la matrizA en la calculadora.
Para calcular la matrizA−1 utilice el botón inverso programado en la calculadora. No trates de elevar la matriz al exponente negativo. Esto no va a funcionar.
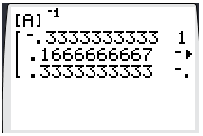
Tenga en cuenta que la calculadora puede devolver versiones decimales de las fracciones y no mostrará la matriz completa en su visualización limitada. Tendrás que desplazarte hacia la derecha para confirmar queA−1 coincide con lo que ya has encontrado. Una vez que hayas encontrado sigueA−1 adelante yB guárdala como matriz para que no necesites escribir las entradas.
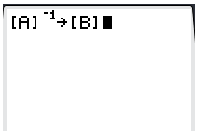
A−1⋅A=B⋅A
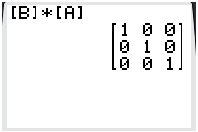
A⋅A−1=A⋅B
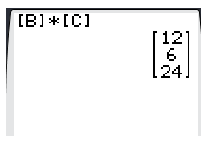
A−1⋅[9636−12]=B⋅[9636−12]=B⋅C
Necesitas crear una matrizC=[9636−12]
Poder usar efectivamente una calculadora debería mejorar tu comprensión de las matrices y permitirte verificar todo el trabajo que haces a mano.
La matriz de identidad pasa a ser su propia inversa. Encuentra otra matriz que sea su propia inversa.
A Helmert se le ocurrió una matriz muy inteligente que resulta ser su propia inversa. Aquí están las2×2 y las3×3 versiones.
[1√21√21√2−1√2],[1√31√31√31√2−1√201√61√6−2√6]
Encuentre la inversa de cada una de las siguientes matrices, si es posible. Asegúrate de hacer algunos a mano y algunos con tu calculadora.
1. [4523]
2. [−3625]
3. [−1220]
4. [1601]
5. [652−2]
6. [4263]
7. [−13−4421125]
8. [45890103−2]
9. [07−12−31680]
10. [42−3245180]
11. [−2−6−12−1−5−2234]
12. [−263240−821]
13. Demuestre que la2×2 matriz de Helmert es su propia inversa:[1√21√21√2−1√2]
14. Demuestre que la3×3 matriz de Helmert es su propia inversa:[1√31√31√31√2−1√201√61√6−2√6]
15. Las matrices no cuadradas a veces tienen inversos izquierdosA−1⋅A=I, dónde, o inversos derechos, dóndeA⋅A−1=I. ¿Por qué las matrices no cuadradas no pueden tener inversos “regulares”?