
3.8: Momento cuadrupolo
- Page ID
- 131898

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Considera el sistema de cargos que se muestra en la Figura\(III\) .13. No tiene carga neta y ningún momento dipolo neto. A diferencia de un dipolo, no experimentará ni una fuerza neta ni un par neto en ningún campo uniforme. Puede o no experimentar una fuerza neta en un campo externo no uniforme. Por ejemplo, si pensamos en el cuadrupolo como dos dipolos, cada dipolo experimentará una fuerza proporcional al gradiente de campo local en el que se encuentre. Si los gradientes de campo en la ubicación de cada dipolo son iguales, las fuerzas en cada dipolo serán iguales pero opuestas, y no habrá fuerza neta sobre el cuadrupolo. Sin embargo, si los gradientes de campo en las posiciones de los dos dipolos son desiguales, las fuerzas sobre los dos dipolos serán desiguales, y habrá una fuerza neta sobre el cuadrupolo. Así habrá una fuerza neta si hay un gradiente distinto de cero del gradiente de campo. Dicho de otra manera, no habrá fuerza neta sobre el cuadrupolo si las segundas derivadas parciales mixtas de los componentes de campo (¡las terceras derivadas del potencial!) son cero. Además, si el cuadrupolo está en un campo no uniforme, aumentando, digamos, hacia la derecha, el par superior experimentará una fuerza hacia la derecha y el par inferior experimentará una fuerza hacia la izquierda; así el sistema experimentará un par neto en un campo no homogéneo, aunque no habrá fuerza neta a menos que el campo los gradientes en los dos pares son desiguales.
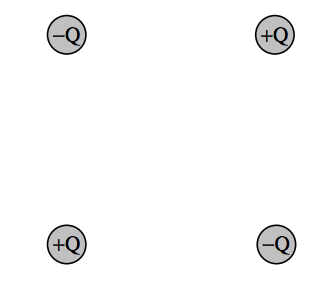
\(\text{FIGURE III.13}\)
El sistema posee lo que se conoce como momento cuadrupolo. Mientras que una sola carga es una cantidad escalar, y un momento dipolo es una cantidad vectorial, el momento cuadrupolo es un tensor simétrico de segundo orden.
El momento dipolar de un sistema de cargas es un vector con tres componentes dados por
\[\begin{align*} p_x &=\sum Q_i x_i \\[4pt] p_y &=\sum Q_iy_i \\[4pt] p_z &=\sum Q_i z_i . \end{align*}\]
El momento cuadrupolar\(\textbf{q}\) tiene nueve componentes (de los cuales seis son distintos) definidos por
\[q_{xx}=\sum Q_ix_i^2 \nonumber\]
\[ q_{xy}=\sum Q_ix_iy_i \nonumber\]
etc., y su representación matricial es
\[\textbf{q}=\begin{pmatrix} q_{xx} & q_{xy} & q_{xz} \\ q_{xy} & q_{yy} & q_{yz} \\ q_{xz} & q_{yz} & q_{zz} \\ \end{pmatrix}\label{3.8.1}\]
Para una distribución de carga continua con\(ρ\) culombios de densidad de carga por metro cuadrado, los componentes estarán dados por\(q_{xx}=\int \rho x^2 d\tau \), etc., donde\(d\tau\) es un elemento de volumen, dado en coordenadas rectangulares por\(dx\,dy\,dz\) y en coordenadas esféricas por\(r^2\sin θ\,dr\,dθ\,dφ\). La unidad SI de momento cuadrupolo es C m 2, y las dimensiones son L 2 Q, Por rotación adecuada de ejes, de la manera habitual (ver por ejemplo la sección 2.17 de Mecánica Clásica), la matriz puede ser diagonalizada, y los elementos diagonales son entonces los valores propios del momento cuadrupolo, y la traza de la matriz es inalterada por la rotación.