
6.4: Diagramas de cuerpo libre
- Page ID
- 128132

Como muestra la Figura 6.2.1, tratar de dibujar cada fuerza que actúa sobre cada objeto puede llegar a ser muy rápidamente bastante desordenado. Y de todos modos, esto no suele ser lo que necesitamos: lo que necesitamos es separar limpiamente todas las fuerzas que actúan sobre un objeto dado, un objeto a la vez, para que podamos aplicar la segunda ley de Newton,\(F_{net} = ma\), a cada objeto individualmente.
Para lograrlo, utilizamos lo que se conoce como diagramas de cuerpo libre. En un diagrama de cuerpo libre, un objeto potencialmente muy complicado es reemplazado simbólicamente por un punto o un círculo pequeño, y todas las fuerzas que actúan sobre el objeto se dibujan (aproximadamente a escala y debidamente etiquetadas) actuando sobre el punto. Independientemente de si una fuerza es una fuerza de tracción o empuje, la convención es dibujarla siempre como un vector que se origina en el punto. Si el sistema está acelerando, también es una buena idea indicar la dirección de la aceleración también en algún lugar del diagrama.
La siguiente figura muestra, como ejemplo, un diagrama de cuerpo libre para el bloque 1 de la figura\(\PageIndex{1}\), en presencia tanto de una aceleración distinta de cero como de una fuerza de fricción cinética. El diagrama incluye todas las fuerzas, incluso la gravedad y la fuerza normal, que quedaron fuera de la imagen en la Figura\(\PageIndex{1}\).
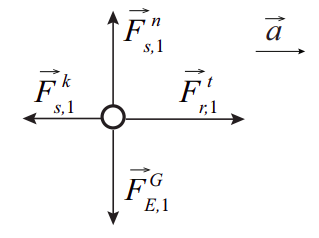
Obsérvese que he dibujado\(F^n\) y la fuerza de gravedad\(F^G_{E,1}\) como teniendo la misma magnitud, ya que no hay aceleración vertical para ese bloque. Si conozco el valor de\(\mu_k\), también debería tratar de dibujar\(F_k = \mu_k F^n\) aproximadamente a escala con las otras dos fuerzas. Entonces, como sé que hay una aceleración hacia la derecha, necesito dibujar\(F^t\) mayor que\(F^k\), ya que la fuerza neta sobre el bloque debe estar también a la derecha. Y, si estuviera dibujando un diagrama de cuerpo libre para el bloque 2, tendría que asegurarme de que dibujé su peso,\(F^G_{E,2}\), como siendo mayor en magnitud que\(F^t\), ya que la fuerza neta sobre ese bloque necesita ser a la baja.