7.3: Rotaciones alrededor de un eje arbitrario
- Page ID
- 129681
En el Capítulo 5, estudiamos la rotación de cuerpos rígidos alrededor de un eje de simetría. Para estos casos, tenemos\(\boldsymbol{L} = I \boldsymbol{\omega}\), donde yo es el momento de inercia con respecto al eje de rotación. Ya notamos que\(I\) depende de qué eje escojamos, y que la relación proporcional entre el vector de rotación y el momento angular no es la posibilidad más general. En esta sección, derivaremos la forma más general, en la que el número I es reemplazado por un tensor 2, es decir, un mapa de un espacio vectorial (aquí\(\mathbb{R}^{3}\)) en sí mismo, representado por una matriz 3×3.
Tensor Momento de Inercia
Para llegar a la relación más general entre\(\boldsymbol{L}\) y\(\boldsymbol{\omega}\), volvemos a la definición original de\(\boldsymbol{L} = \boldsymbol{r} \times \boldsymbol{p}\), y consideramos el movimiento de una mancuerna alrededor de un eje que no es un eje de simetría (ver Figura 7.2.1). Si la mancuerna hace un ángulo\(\theta\) con el eje de rotación, y gira en sentido antihorario como se ve desde arriba, obtenemos:
\[\begin{align} \boldsymbol{L} &=m \boldsymbol{r} \times \boldsymbol{v}+m(-\boldsymbol{r}) \times(-\boldsymbol{v}) \\[4pt] &=2 m \boldsymbol{r} \times(\boldsymbol{\omega} \times \boldsymbol{r}) \\[4pt] &=2 m[\boldsymbol{\omega}(\boldsymbol{r} \cdot \boldsymbol{r})-\boldsymbol{r}(\boldsymbol{r} \cdot \boldsymbol{\omega})] \\[4pt] &=2 m r^{2} \boldsymbol{\omega}-2 m \omega r \cos \theta \boldsymbol{r} \label{angularmomentum} \end{align}\]
donde usamos la Ecuación 5.1.5 relacionando la velocidad lineal con la velocidad\(\boldsymbol{v}\) de rotación\(\boldsymbol{\omega}\) a través de\(\boldsymbol{v} = \boldsymbol{\omega} \times \boldsymbol{r}\). La ecuación\ ref {angularmomentum} muestra que para una rotación alrededor de un eje arbitrario a través del centro de la mancuerna, obtenemos dos términos en\(\boldsymbol{L}\). El primer término,\(2mr^2 \boldsymbol{\omega}\), es la rotación alrededor de un eje perpendicular a la mancuerna, e iguala\(I \boldsymbol{\omega}\) para\(I = 2mr^2\), como encontramos en la Sección 5.4. El segundo término, (\(−2m \omega r \cos{\theta} \boldsymbol{r}\)), nos dice que en general también obtenemos un componente de\(\boldsymbol{L}\) a lo largo del eje apuntando desde el centro de rotación hasta la masa giratoria (es decir, el brazo). Tenga en cuenta que los dos términos cancelan cuando\(\theta = \pi /2\), como esperaríamos para en ese caso el momento de inercia de la mancuerna es cero.
Podemos generalizar fácilmente la Ecuación\ ref {angularmomentum} a cualquier conjunto de masas\(m_{\alpha}\) con vectores de posición\(\boldsymbol{r}_{\alpha}\) (donde el índice\(\alpha\) recorre todas las partículas), y con una rotación\(\boldsymbol{\omega}\) alrededor de un eje arbitrario:
\[\boldsymbol{L}=\sum_{\alpha} m_{\alpha} \boldsymbol{r}_{\alpha} \times\left(\boldsymbol{\omega} \times \boldsymbol{r}_{\alpha}\right) \equiv \boldsymbol{I} \cdot \boldsymbol{\omega} \label{moitensor}\]
El momento del tensor de inercia se define por la Ecuación\ ref {moitensor}. Es un tensor simétrico, mapeando un vector\(\boldsymbol{\omega}\) en\(\mathbb{R}^{3}\) otro vector\(\boldsymbol{L}\) en\(\mathbb{R}^{3}\). En coordenadas cartesianas, podemos expresar sus nueve componentes como tres momentos de inercia alrededor de los ejes x, y y z, que serán los términos diagonales de\(\boldsymbol{I}\):
\[I_{x x}=\sum_{\alpha} m_{\alpha}\left(y_{\alpha}^{2}+z_{\alpha}^{2}\right) \quad I_{y y}=\sum_{\alpha} m_{\alpha}\left(x_{\alpha}^{2}+z_{\alpha}^{2}\right) \quad I_{z z}=\sum_{\alpha} m_{\alpha}\left(x_{\alpha}^{2}+y_{\alpha}^{2}\right) \label{momsofinert}\]
y tres productos de inercia para los componentes fuera de diagonal:
\[I_{x y}=I_{y x}=-\sum_{\alpha} m_{\alpha} x_{\alpha} y_{\alpha} \quad I_{x z}=I_{z x}=-\sum_{\alpha} m_{\alpha} x_{\alpha} z_{\alpha} \quad I_{y z}=I_{z y}=-\sum_{\alpha} m_{\alpha} y_{\alpha} z_{\alpha} \label{prodsofinert}\]
También podemos escribir ecuaciones\ ref {momsofinert} y\ ref {prodsofinert} de manera más sucinta usando notación de índice, donde\(i\) y\(j\) atropellar\(x, y\) y\(z\), y usamos el delta de Kronecker\(\delta_{ij}\) que es uno si\(i = j\) y cero si\(i \neq j\):
\[I_{i j}=\sum_{\alpha} m_{\alpha}\left(r^{2} \delta_{i j}-r_{i} r_{j}\right)\]
Las ecuaciones\ ref {momsofinert} y\ ref {prodsofinert} generalizan a objetos continuos de la misma manera Ecuación 5.4.2 generalizada a 5.4.3. Usando de nuevo la notación de índice, podemos escribir explícitamente:
\[I_{i j}=\int_{V}\left(r^{2} \delta_{i j}-r_{i} r_{j}\right) \rho(\boldsymbol{r}) \mathrm{d} V\]
El tensor de momento de inercia contiene toda la información sobre la inercia rotacional de un objeto (o una colección de partículas) alrededor de cualquier eje. En particular, si uno de los ejes (digamos el eje z) es un eje de simetría, lo obtenemos\(I_{xz} = I_{yz} = 0\), y para las rotaciones alrededor de ese eje (so\(\boldsymbol{\omega} = \omega \boldsymbol{\hat{z}}\)), recuperamos\(\boldsymbol{L} = I_z \boldsymbol{\omega}\).
Además de calcular el momento angular, también podemos usar el tensor de momento de inercia para calcular la energía cinética para rotaciones alrededor de un eje arbitrario. Contamos con:
\[\begin{aligned} K &=\frac{1}{2} \sum_{\alpha} m_{\alpha} \boldsymbol{v}_{\alpha} \cdot \boldsymbol{v}_{\alpha} \\ &=\frac{1}{2} \sum_{\alpha} m_{\alpha}\left(\boldsymbol{\omega} \times \boldsymbol{r}_{\alpha}\right) \cdot\left(\boldsymbol{\omega} \times \boldsymbol{r}_{\alpha}\right) \\ &=\frac{1}{2} \boldsymbol{\omega} \cdot\left[\sum_{\alpha} m_{\alpha} \boldsymbol{r}_{\alpha} \times\left(\boldsymbol{\omega} \times \boldsymbol{r}_{\alpha}\right)\right] \\ &=\frac{1}{2} \boldsymbol{\omega} \cdot \boldsymbol{L}=\frac{1}{2} \boldsymbol{\omega} \cdot \boldsymbol{I} \cdot \boldsymbol{\omega} \end{aligned}\]
Ecuaciones de Euler
En el marco de laboratorio, tenemos la Ecuación 5.7.1 que relaciona el par y el momento angular. Se utilizó esta ecuación para probar la conservación del momento angular en ausencia de un par externo neto, y para estudiar la precesión. No obstante, para las rotaciones alrededor de un eje arbitrario, es más fácil transformarse en un marco en el que giramos con el objeto, al igual que moverse con el centro de masa facilita mucho el estudio de las colisiones. Ya hemos hecho los cálculos para transformar a un marco co-rotativo en la Sección 7.2; aquí solo necesitamos el resultado en la Ecuación 7.2.2 para encontrar la derivada temporal del momento angular en el marco giratorio. La Ecuación 5.7.1 se traduce entonces en:
\[ \begin{align} \boldsymbol{\tau} &=\frac{\delta \boldsymbol{L}}{\delta t}+\boldsymbol{\omega} \times \boldsymbol{L} \\[4pt] &=\boldsymbol{I} \cdot \dot{\boldsymbol{\omega}}+\boldsymbol{\omega} \times(\boldsymbol{I} \cdot \boldsymbol{\omega}) \label{tau} \end{align}\]
Ahora como\(\boldsymbol{I}\) es simétrico, todos sus valores propios son reales, y sus vectores propios son una base para\(\mathbb{R}^{3}\); además, para valores propios distintos los vectores propios son ortogonales, por lo que a partir de la base de vectores propios podemos construir fácilmente una base ortonormal\(\left(\hat{\boldsymbol{e}}_{1}, \hat{\boldsymbol{e}}_{2}, \hat{\boldsymbol{e}}_{3}\right)\) de vectores propios correspondientes a los tres valores propios\(I_{1}, I_{2}\) y\(I_{3}\). Si expresamos el momento de inercia tensor en esta base ortonormal eigenvector, su representación se convierte en una simple matriz diagonal,\(\boldsymbol{I}=\operatorname{diag}\left(I_{1}, I_{2}, I_{3}\right)\). Llamamos a\(\hat{\boldsymbol{e}}_{i}\) las direcciones los ejes principales de nuestro objeto giratorio, y los valores propios asociados los principales momentos de inercia. La construcción de los ejes principales y momentos de inercia funciona para cualquier objeto, incluidos aquellos que no exhiben ningún tipo de simetría. Si un objeto tiene un eje de simetría, ese eje suele ser también un eje principal, ya que se puede verificar fácilmente calculando los productos de inercia con respecto a ese eje (desaparecen para un eje principal).
Leonhard Euler
Leonhard Euler (1707-1783) fue un matemático suizo que hizo importantes contribuciones a muchas ramas diferentes de las matemáticas y, por aplicación, a la física. También introdujo gran parte de la terminología y notación matemática moderna, incluyendo el concepto de funciones (matemáticas). Euler fue posiblemente el matemático más prolífico que jamás haya vivido, y probablemente sea la persona con más ecuaciones y fórmulas que lleva su nombre. Si bien su padre, que era pastor, animó a Euler a seguir sus pasos, el tutor de Euler, famoso matemático (y amigo de la familia) Johann Bernoulli convenció tanto a padre como a hijo de que el talento de Euler para las matemáticas lo convertiría en un gigante en el campo. Ejemplos famosos del trabajo de Euler incluyen sus contribuciones a la teoría de grafos (el problema de los puentes de Köningsberg), la relación\(e^{i \pi} +1 = 0\) entre cinco números matemáticos fundamentales que lleva su nombre, su trabajo sobre series de poder, un método para resolver numéricamente ecuaciones diferenciales, y su trabajo en mecánica de fluidos (en la que también hay una 'igualación de Euler').

Si expresamos nuestras cantidades rotacionales en la base del eje principal\(\left\{\text {unitvece}_{i}\right\}\) de nuestro objeto giratorio, nuestras ecuaciones se vuelven mucho más simples. Tenemos
\[\boldsymbol{L}=\boldsymbol{I} \cdot \boldsymbol{\omega}=\left(\begin{array}{ccc}{I_{1}} & {0} & {0} \\ {0} & {I_{2}} & {0} \\ {0} & {0} & {I_{3}}\end{array}\right)\left(\begin{array}{c}{\omega_{1}} \\ {\omega_{2}} \\ {\omega_{3}}\end{array}\right)=\left(\begin{array}{c}{I_{1} \omega_{1}} \\ {I_{2} \omega_{2}} \\ {I_{3} \omega_{3}}\end{array}\right)\]
o en componentes:\(L_{i}=I_{i} \omega_{i}\). La ecuación\ ref {tau} simplifica a:
\[\boldsymbol{\tau}=\left(\begin{array}{c}{I_{1} \dot{\omega}_{1}} \\ {I_{2} \dot{\omega}_{2}} \\ {I_{3} \dot{\omega}_{3}}\end{array}\right)+\left(\begin{array}{c}{\omega_{1}} \\ {\omega_{2}} \\ {\omega_{3}}\end{array}\right) \times\left(\begin{array}{c}{I_{1} \omega_{1}} \\ {I_{2} \omega_{2}} \\ {I_{3} \omega_{3}}\end{array}\right)\]
que da para los tres componentes del par:
\[\begin{array}{l}{\tau_{1}=I_{1} \dot{\omega}_{1}+\left(I_{3}-I_{2}\right) \omega_{3} \omega_{2}} \\ {\tau_{2}=I_{2} \dot{\omega}_{2}+\left(I_{1}-I_{3}\right) \omega_{1} \omega_{3}} \\ {\tau_{3}=I_{3} \dot{\omega}_{3}+\left(I_{2}-I_{1}\right) \omega_{2} \omega_{1}} \label{t1t2t3} \end{array}\]
Las ecuaciones\ ref {t1t2t3} se conocen como ecuaciones de Euler (de un objeto giratorio - la clasificación es necesaria ya que hay muchas ecuaciones asociadas a Euler).
Como ejemplo, apliquemos las ecuaciones de Euler a nuestra mancuerna. Tomamos el origen en el pivote, es decir, donde el eje de rotación cruza el propio eje de la mancuerna. La mancuerna sí tiene simetría rotacional, alrededor del eje que conecta las dos masas, llamémosle el eje 3. Los otros dos ejes luego abarcan el plano perpendicular a la mancuerna; podemos elegir cualquier par ortonormal para los ejes 1 y 2. El vector de rotación en esta base viene dado por
\[\boldsymbol{\omega}=\left(\begin{array}{c}{\omega_{1}} \\ {\omega_{2}} \\ {\omega_{3}}\end{array}\right)=\omega\left(\begin{array}{c}{0} \\ {\sin \theta} \\ {\cos \theta}\end{array}\right)\]
Los productos de la inercia desaparecen; los momentos principales vienen dados por\(I_{1}=I_{2}=\frac{1}{2} m d^{2}\) (con\(d\) la distancia entre las dos masas) y\(I_3 = 0\). Siempre y cuando la velocidad de rotación sea constante (\(\dot{\boldsymbol{\omega}}=0\)), obtenemos de las ecuaciones de Euler que\(\tau_{2}=\tau_{3}=0\), y\(\tau_{1}=-\frac{1}{2} m d^{2} \omega^{2} \sin \theta \cos \theta\). Podemos así rotar nuestra mancuerna alrededor de un eje que no es un eje de simetría, sino a un precio: ejerce un torque sobre su soporte, que a su vez ejerce un par de contratorsión para mantener el eje de rotación de la mancuerna en su lugar. Este par cambiará el momento angular de nuestra mancuerna con el tiempo. Si retiramos la fuerza que ejerce el contrapar (por ejemplo, si nuestra mancuerna está soportada en el pivote, retiramos el soporte), la mancuerna girará, en nuestro ejemplo alrededor del eje 2, hasta que el vector de rotación se\(\boldsymbol{\omega}\) haya vuelto paralelo al vector de momento angular\(\boldsymbol{L}\).
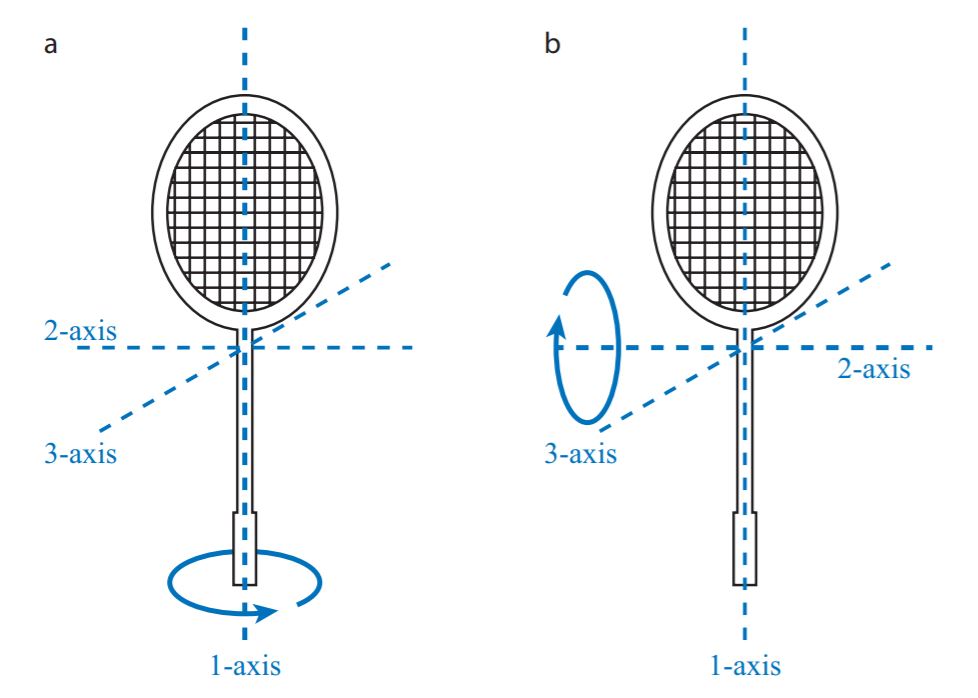
Para la mancuerna, al tener una simetría rotacional, dos de los momentos principales son idénticos. Hay muchos objetos que no tienen tal simetría, pero aún así tienen tres ejes principales bien definidos. Si bien para la mancuerna la rotación alrededor de cualquiera de los ejes principales es estable, este no es el caso de un objeto con tres momentos principales diferentes. Un buen ejemplo es una raqueta de tenis, cuyos ejes principales se esbozan en la Figura 7.3.1. El teorema que lo acompaña sobre la estabilidad de las rotaciones alrededor de estos ejes se demuestra fácilmente con una raqueta de tenis, y lleva su nombre.
Teorema\(\PageIndex{1}\): Tennis Racket Theorem
Si los tres momentos principales de inercia de un objeto son diferentes (digamos\(I_{1}<I_{2}<I_{3}\)), entonces las rotaciones alrededor de los ejes principales 1 y 3 se asocian con los momentos máximo y mínimo\(I_1\) y\(I_3\) son estables, pero las alrededor del eje principal 2 asociadas con el momento intermedio\(I_2\) son inestables.
Prueba
Para rotaciones alrededor de un eje principal, el par es cero (por construcción), por lo que las ecuaciones de Euler leen
\[\begin{array}{l}{\dot{\omega}_{1}+\frac{I_{3}-I_{2}}{I_{1}} \omega_{3} \omega_{2}=0} \\ {\dot{\omega}_{2}+\frac{I_{1}-I_{3}}{I_{2}} \omega_{1} \omega_{3}=0} \\ {\dot{\omega}_{3}+\frac{I_{2}-I_{1}}{I_{3}} \omega_{2} \omega_{1}=0}\end{array} \ref{eulers}\]
Si giramos alrededor del eje 1, entonces\(\omega _2\) y\(\omega _3\) son (al menos inicialmente) muy pequeños, así que la primera línea en\ ref {eulers} da\(\dot{\omega}_{1}=0\). Entonces podemos derivar una ecuación para\(\omega _2\) tomando la derivada de tiempo de la segunda línea de\ ref {eulers} y usando la tercera línea for\(\dot{\omega}_{3}\), que da:
\[0=\ddot{\omega}_{2}+\frac{I_{1}-I_{3}}{I_{2}}\left(\dot{\omega}_{1} \omega_{3}+\omega_{1} \omega_{3}\right)=\ddot{\omega}_{2}-\frac{I_{1}-I_{3}}{I_{2}} \frac{I_{2}-I_{1}}{I_{3}} \omega_{1}^{2} \omega_{2}\]
Ahora\(\frac{\left(I_{1}-I_{3}\right)}{I_{2}}<0, \frac{\left(I_{2}-I_{1}\right)}{I_{3}}>0\), y\(\omega_{1}^{2}>0\), y\(\omega _2\) satisface la ecuación diferencial\(\ddot{\omega}_{2}=-c \omega_{2}\), con\(c > 0\). Las soluciones a esta ecuación son, por supuesto, senos y cosenos con amplitud constante. Aunque así\(\omega _2\) puede ser finita, su amplitud no crece con el tiempo (y de hecho disminuirá debido al arrastre), por lo que las rotaciones alrededor del eje 2 son opuestas. De igual manera, encontramos que las rotaciones alrededor del eje 3 tampoco pueden crecer en amplitud, y las rotaciones alrededor del eje 1 son estables. Podemos repetir el mismo argumento para los ejes 2 y 3. Para el eje 3, encontramos que las rotaciones alrededor de los otros dos ejes son igualmente opuestas, por lo que las rotaciones alrededor de este eje también son estables. Para el eje 2 por otro lado, encontramos que
\[0=\ddot{\omega}_{1}-\frac{I_{3}-I_{2}}{I_{1}} \frac{I_{2}-I_{1}}{I_{3}} \omega_{2}^{2} \omega_{1}\]
o\(\ddot{\omega}_{1}=c \omega_{1}\), con\(c\) otra constante positiva. Las soluciones a esta ecuación no son senos y cosenos, sino exponenciales:\(\omega_{1}(t)=A \exp (\sqrt{c} t)+B \exp (-\sqrt{c} t)\), lo que significa que para cualquier rotación inicial finita alrededor del eje 1, la amplitud de esta rotación crecerá con el tiempo, y las rotaciones alrededor del eje 2 son, por lo tanto, inestables.