
15.2: La Cuatro Aceleración
- Page ID
- 129674
Por supuesto, también podemos definir una versión de cuatro vectores de la aceleración, tomando la derivada de la velocidad de cuatro con respecto al tiempo adecuado. Al igual que con las fuerzas, veremos que nos esperan algunas sorpresas desagradables, esta vez porque la derivada del tiempo adecuada actúa sobre el\(\gamma(u)\) factor en la velocidad así como sobre los componentes:
\[\overline{\boldsymbol{a}} \equiv \frac{\mathrm{d} \overline{\boldsymbol{v}}}{\mathrm{d} \tau}=\gamma(v) \frac{\mathrm{d}}{\mathrm{d} t} \gamma(v)\left(c, v_{x}, v_{y}, v_{z}\right)=\left(\gamma^{4}(v) \frac{\boldsymbol{a} \cdot \boldsymbol{v}}{c}, \gamma^{2}(v) \boldsymbol{a}+\gamma^{4}(v) \frac{\boldsymbol{a} \cdot \boldsymbol{v}}{c^{2}} \boldsymbol{v}\right) \label{15.2.1}\]
donde usamos la derivada de tiempo de la\(\gamma(u)\) función
\[\frac{\mathrm{d} \gamma}{\mathrm{d} t}=\frac{\mathrm{d}}{\mathrm{d} t} \frac{1}{\sqrt{1-(v / c)^{2}}}=-\frac{1}{2} \frac{1}{\left(1-(v / c)^{2}\right)^{3 / 2}} \cdot\left(-2 \frac{\boldsymbol{v}}{c^{2}} \cdot \frac{\mathrm{d} \boldsymbol{v}}{\mathrm{d} t}\right)=\gamma^{3}(v) \frac{\boldsymbol{v} \cdot \boldsymbol{a}}{c^{2}} \label{15.2.2}\]
y hemos introducido el triple vector de aceleración (clásico) como la derivada coordenada del tiempo del tres-vector de velocidad:\(\boldsymbol{a}=\mathrm{d} \boldsymbol{v} / \mathrm{d} t\). Como se puede ver en la ecuación (\ ref {15.2.1}), la cuatro aceleración tiene términos con los que escala\(\gamma^{2}\) y términos con los que escala\(\gamma^{4}\), lo que la convierte en un objeto inconveniente para trabajar. Geométricamente, sin embargo, tiene una interpretación limpia, que aparece a la vista una vez que se considera el producto interno entre los cuatro vectores de aceleración y velocidad:
\[\begin{aligned} \overline{\boldsymbol{a}} \cdot \overline{\boldsymbol{v}} &=\gamma^{5}(v)(\boldsymbol{a} \cdot \boldsymbol{v})-\gamma^{3}(v)(\boldsymbol{a} \cdot \boldsymbol{v})-\gamma^{5}(v) \frac{\boldsymbol{a} \cdot \boldsymbol{v}}{c^{2}}(\boldsymbol{v} \cdot \boldsymbol{v}) \\ &=\gamma^{3}(v)(\boldsymbol{a} \cdot \boldsymbol{v})\left[\frac{1-v^{2} / c^{2}}{1-v^{2} / c^{2}}-1\right] \\ &=0 \end{aligned}\label{15.2.3}\]
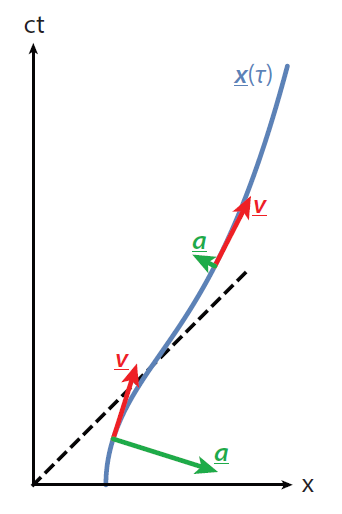
¡Estos cuatro vectores son por lo tanto (en el sentido de los cuatro vectores) siempre perpendiculares! Eso parece extraño desde un punto de vista clásico: si te mueves en la\(x\) dirección -y aceleras, tanto la velocidad como la aceleración apuntan en la misma dirección y, por lo tanto, ciertamente no son perpendiculares. Por supuesto, tenemos un caso perpendicular: movimiento circular (con una velocidad a lo largo del círculo y aceleración hacia adentro). Algo similar sucede aquí, si se considera la línea mundial de una partícula en un diagrama de espacio-tiempo (ver Figura 15.2.1). Se puede pensar en esta línea como una curva parametrizada por el tiempo adecuado\(\tau\); los puntos en la curva son dados entonces por la posición de cuatro vectores a la vez\(\tau\). La velocidad de cuatro vectores es la tangente normalizada a esta línea (y de hecho, por construcción, tiene una longitud fija\(c\)). Cuando te mueves a velocidad constante, la línea es recta, pero si cambias tu velocidad (es decir, aceleras), la línea se curva. El cuatro vector de aceleración cuantifica esa curvatura y apunta en la dirección en la que la curva se está doblando\(^{1}\).
Porque por definición\(\overline{\boldsymbol{p}}=m \overline{\boldsymbol{v}}, \text { and } \overline{\boldsymbol{F}}=\mathrm{d} \overline{\boldsymbol{p}} / \mathrm{d} \tau\), mientras se conserve la masa (\(\mathrm{d} m / \mathrm{d} \tau=0\)), sí tenemos F¯ Æma¯, así que la segunda ley de Newton sí se mantiene para cuatro vectores. Este resultado no es tan útil como en la mecánica clásica, aunque ya que como hemos visto, las fuerzas se transforman de manera difícil de manejar entre cuadros inerciales, y la aceleración solo puede curvar la trayectoria en el espacio-tiempo.
Para ver cómo se pueden usar fuerzas y aceleraciones para un caso en el que no tienes más remedio que utilizarlas\(^{2}\), considera una partícula que está bajo aceleración constante, debido a una constante de tres fuerzas que actúa sobre ella en el (¡no inercial!) marco de movimiento conjunto de la partícula (por ejemplo, debido a un motor de cohete unido a la partícula). Desde el punto de vista de un marco de descanso inercial, tenemos
\[\frac{\mathrm{d} \boldsymbol{p}}{\mathrm{d} t}=\boldsymbol{F} \quad \text { and } \quad \frac{\mathrm{d} \boldsymbol{F}}{\mathrm{d} t}=0 \label{15.2.4}\]
Elija el\(x\) -eje para estar en la dirección de\(\boldsymbol{F}\), y defina a = a_ {x} = F_ {x} /m\). Entonces
\[a=\frac{\mathrm{d}\left(p_{x} / m\right)}{\mathrm{d} t}=\frac{\mathrm{d} w_{x}}{\mathrm{d} t} \label {15.2.5}\]
donde\(\boldsymbol{w} \equiv \boldsymbol{p} / m=\gamma(v) \boldsymbol{v}\), y, como tenemos solamente movimiento en la\(x\) dirección positiva aquí, tenemos\(w_{x}=w\), (v_ {x} =v\). Resolviendo la ecuación (\ ref {15.2.5}) para\(w\), obtenemos la velocidad de una partícula uniformemente acelerada:\(w(t)=w(0)+a t\). Ahora resolviendo la velocidad realmente medida en el marco inercial (toma\(w(0) = 0\)), encontramos
\[\gamma(v(t)) v(t)=w(t)=a t \quad \Rightarrow \quad v^{2}=a^{2} t^{2}\left(1-\frac{v^{2}}{c^{2}}\right) \quad \Rightarrow \quad v=\frac{a t}{\sqrt{1+a^{2} t^{2} / c^{2}}} \label{15.2.6}\]
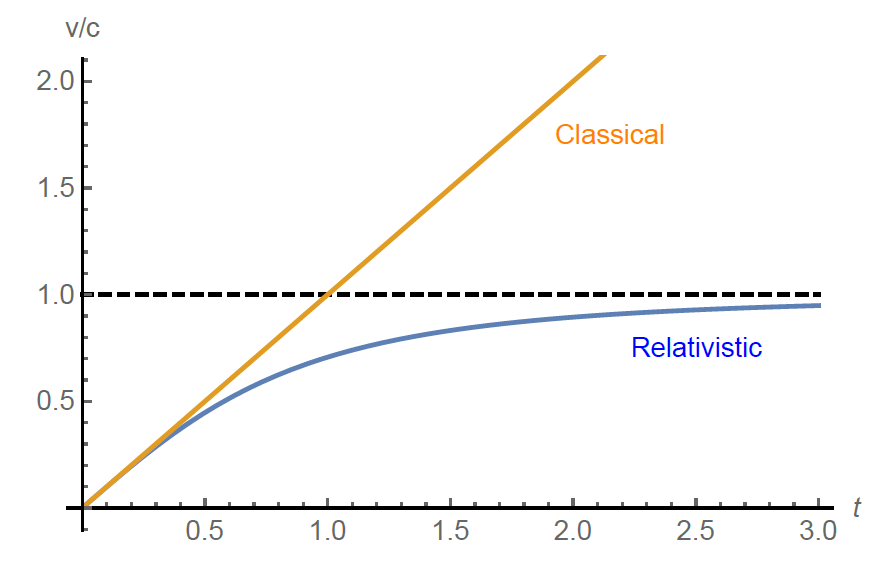
La Figura 15.2.2 compara la velocidad relativista con el resultado clásico. Como era de esperar, inicialmente son idénticos, pero una vez que la velocidad comienza a repuntar, vemos que los resultados clásicos comienzan a desviarse significativamente. En particular, el resultado relativista confirma que no importa cuánto tiempo aceleremos, nuestra partícula nunca superará la velocidad de la luz.
En una nota al margen, también podemos resolver para la trayectoria real de nuestra partícula: simplemente integrar\(\mathrm{d} x / \mathrm{d} t=v(t)\), lo que da
\[x(t)=\frac{c^{2}}{a}\left(\sqrt{1+\frac{a^{2} t^{2}}{c^{2}}}-1\right)\label{15.2.7}\]
Para valores pequeños de\(t\), nosotros (de nuevo) recuperamos el resultado clásico,\(x=\frac{1}{2} a t^{2}\).
\(^{1}\)Existe una correspondencia uno a uno entre estas 'curvas del mundo' y curvas afinamente parametrizadas en el espacio real de dos o más
dimensiones. Allí también, se puede definir un vector tangente como la derivada del vector de posición, que para una curva afinamente parametrizada
es siempre de longitud unitaria. La derivada del vector tangente, conocida como la normal, siempre es perpendicular a la tangente, y apunta
en la dirección en la que se flexiona la curva; su magnitud cuantifica la curvatura.
\(^{2}\)Estoy seguro que has notado el obvio juego de palabras aquí.