
2.3: Marcos inerciales de referencia
- Page ID
- 126849
Un marco de referencia inercial es aquel en el que las leyes del movimiento de Newton son válidas. Es un marco de referencia no acelerado. Un marco inercial debe ser homogéneo e isotrópico. Los experimentos físicos se pueden llevar a cabo en diferentes marcos de referencia inerciales. La transformación galileana proporciona un medio de conversión entre dos marcos inerciales de referencia que se mueven a una velocidad relativa constante. Considere dos marcos de referencia\(O\) y\(O'\) con\(O'\) movimiento con velocidad relativa constante\({\bf V}\) en el tiempo\(t\). La figura\(\PageIndex{1}\) muestra una transformación galileana que puede expresarse en forma de vector.
\ begin {ecuación}\ begin {split}\ mathbf {r'} & =\ mathbf {r} -\ mathbf {V} t\\ t' & = t\ end {split}\ label {eq:2.7}\ end {ecuación}
La ecuación\ ref {eq:2.7} da el impulso, asumiendo la hipótesis de Newton de que el tiempo es invariante para cambiar de marcos inerciales de referencia. La diferenciación de esta transformación da
\ begin {ecuación}
\ begin {split}
\ mathbf {\ punto {r} '} & =\ mathbf {\ punto {r}} -\ mathbf {V}\\
\ mathbf {\ ddot {r}'} & =\ mathbf {\ ddot {r}}
\ end {split}\ label {eq:2.8}
\ end {ecuación}
Tenga en cuenta que las fuerzas en los fotogramas inerciales cebados y no cebados están relacionadas por\ begin {ecuación}\ label {eq:2.9}\ mathbf {F} =\ frac {d\ mathbf {p}} {dt} =m\ mathbf {\ ddot {r}} =m\ mathbf {\ ddot {r} '} =\ mathbf {F}'
\ end {ecuación}
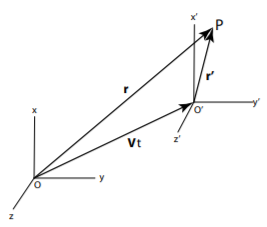
Figura\(\PageIndex{1}\): Marco que\(O'\) se mueve con una velocidad constante\(V\) con respecto al fotograma\(O\) en ese momento\(t\).
Así, las leyes del movimiento de Newton son invariantes bajo una transformación galileana, es decir, la masa inercial no se modifica bajo las transformaciones galileanas. Si las leyes de Newton son válidas en un marco de referencia inercial, entonces son válidas en cualquier marco de referencia en movimiento uniforme con respecto al primer marco de referencia. Esta invarianza se llama invarianza galileana. Hay un número infinito de posibles marcos inerciales todos conectados por transformaciones galileanas.
La invarianza galileana viola la Teoría de la Relatividad de Einstein. Para satisfacer el postulado de Einstein de que las leyes de la física son las mismas en todos los marcos inerciales, así como satisfacer las ecuaciones de Maxwell para el electromagnetismo, es necesario reemplazar la transformación galileana por la transformación de Lorentz. Como se discutirá en el capítulo\(17\), la transformación de Lorentz conduce a la contracción de Lorentz y a la dilatación del tiempo, ambas relacionadas con el parámetro\(\gamma \equiv \frac{1}{\sqrt{1 - (\frac{v}{c})^2}} \) donde c es la velocidad de la luz en vacío. Afortunadamente, la mayoría de las situaciones de la vida involucran velocidades donde\(v < < c\); por ejemplo, para un cuerpo que se mueve a 25 000 mph (11 111 m/s) que es la velocidad de escape para un cuerpo en la superficie de la tierra, el\(\gamma\) factor difiere de la unidad en aproximadamente la\(6.8 \times 10^{-10}\) cual es insignificante. Los efectos relativistas son significativos solo en física nuclear y de partículas y algunas condiciones exóticas en astrofísica. Así, a los efectos de la mecánica clásica suele ser razonable suponer que la transformación galileana es válida y se obedece bien en la mayoría de las condiciones prácticas.