
2.9: Momentum angular de un sistema de muchos cuerpos
- Page ID
- 126805
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Descomposición del centro de masa
Como fue el caso del momento lineal, para un sistema de muchos cuerpos es posible separar el momento angular en dos componentes. Un componente es el momento angular alrededor del centro de masa y el otro componente es el movimiento angular del centro de masa alrededor del origen del sistema de coordenadas. Esta separación se realiza describiendo el momento angular de un sistema de muchos cuerpos utilizando un vector de posición\( \mathbf{r}_i^\prime \) con respecto al centro de masa más la ubicación vectorial\( \mathbf{R} \) del centro de masa.
\[\label{eq:2.37}\mathbf{r}_i = \mathbf{R} + \mathbf{r}_i^\prime \]
El momento angular total
\[ \mathbf{L} = \sum_{i}^n \mathbf{L}_i = \sum_{i}^n \mathbf{r}_i \times \mathbf{p}_i \\ = \sum_i^n ( \mathbf{R} + \mathbf{r}_i^\prime ) \times m_i ( \mathbf{\dot R} + \mathbf{\dot r}^\prime_i ) \\ = \sum_i^n m_i \big[\mathbf{r}_i^\prime \times \mathbf{\dot r}_i^\prime + \mathbf{r}_i^\prime \times \mathbf{\dot R} + \mathbf{R} \times \mathbf{\dot r}_i^\prime + \mathbf{R} \times \mathbf{\dot R} ] \]
Tenga en cuenta que si los vectores de posición son con respecto al centro de masa, entonces\( \sum_i^n m_i \mathbf{r}_i^\prime = 0 \) resulta en que los dos términos medios en el paréntesis sean cero, es decir;
\[\label{eq:2.39} \mathbf{L} = \sum_{i}^{n} \mathbf{r}^\prime_i \times \mathbf{p}^\prime_i + \mathbf{R} + \mathbf{P}\]
El momento angular total se separa en dos términos, el momento angular alrededor del centro de masa, más el momento angular del centro de masa alrededor del origen del sistema de ejes. Esta factorización del momento angular sólo se aplica para el centro de masa. Esto se llama primer teorema de Samuel König.
Ecuaciones de movimiento
La derivada del tiempo del momento angular
\[\label{eq:2.40}\mathbf{\dot L}_i = \frac{d}{dt}\mathbf{r}_i \times \mathbf{p}_i = \mathbf{\dot r}_i \times \mathbf{p}_i + \mathbf{r}_i \times \mathbf{\dot p}_i\]
\[\label{eq:2.41}\mathbf{\dot r}_i \times \mathbf{p}_i = m_i\mathbf{\dot r}_i\times \mathbf{\dot r}_i = 0 \]
\[\label{eq:2.42}\mathbf{\dot L}_i = \mathbf{r}_i \times \mathbf{\dot p}_i = \mathbf{r}_i \times \mathbf{F}_i = \mathbf{N}_i\]
Considerar que la fuerza resultante que actúa sobre la\( n \) partícula\( i \) en este sistema de partículas se puede separar en una fuerza externa\( \mathbf{F}_i^{Ext} \) más fuerzas internas entre las\( n \) partículas del sistema
\[\label{eq:2.43} \mathbf{F}_i = \mathbf{F}_i^E + \sum_{ \substack {j \\ i \neq j}}^{n} \mathbf{f} _{ij} \]
El origen de la fuerza externa es desde el exterior del sistema mientras que la fuerza interna se debe a la interacción con las otras\( n -1 \) partículas en el sistema. La Ley de Newton nos dice que
\[\label{eq:2.44}\mathbf{\dot p}_i = \mathbf{F}_i = \mathbf{F}_i^E + \sum_{\substack {j \\ i \neq j}}^{n}\mathbf{f}_{ij}\]
La tasa de cambio del momento angular total es
\[\label{eq:2.45}\mathbf{\dot L} = \sum_i \mathbf{\dot L}_i = \sum_i \mathbf{r}_i \times \mathbf{\dot p}_i = \sum_i\mathbf{r}_i \times \mathbf{F}_i^E\ + \sum_i\sum_{\substack{j \\ i \neq j }}\mathbf{r}_i \times \mathbf{f}_{ij} \]
Desde\( \mathbf{f}_{ij} = -\mathbf{f}_{ji} \) la última expresión se puede escribir como
\[\label{eq:2.46} \sum_i \sum _{\substack{j \\ i \neq j}} \mathbf{r} _i \times \mathbf{f} _{ij} = \sum_i \sum _{\substack{j \\ i < j}} ( \mathbf{r}_i - \mathbf{r}_j ) \times \mathbf{f} _{ij} \]
Tenga en cuenta que\( ( \mathbf{r}_i - \mathbf{r}_j ) \) es el vector que se\( \mathbf{r} _{ij} \) conecta\( j \) a\( i \). Para las fuerzas centrales el vector de fuerza\( \mathbf{f}_{ij} = f_{ij} \widehat{\mathbf{r}_{ij}} \) así
\[\label{eq:2.47} \sum_i\sum_{\substack{j \\ i < j}} ( \mathbf{r}_i - \mathbf{r}_j ) \times \mathbf{f}_{ij}= \sum_i\sum_{\substack{j \\ i < j }}\mathbf{r}_i \times \mathbf{f}_{ij } \hat{\mathbf{r}_{ij}} \]
Es decir, para las fuerzas internas centrales el par interno total en un sistema de partículas es cero, y la tasa de cambio del momento angular total para las fuerzas internas centrales se convierte en
\[\label{eq:2.48}\mathbf{\dot L} = \sum_i \mathbf{r}_i \times \mathbf{F}_i^E = \sum_i \mathbf{N}_i^E = \mathbf{N}^E\]
donde\( \mathbf{N}^E \) está el par externo neto que actúa sobre el sistema. La ecuación\ ref {eq:2.48} conduce a las formas diferencial e integral de la primera integral relacionando el momento angular total con el par externo total.
\[\label{eq:2.49} \mathbf{\dot L} = \mathbf{N}^E \hspace{5cm} \int_1^2 \mathbf{N}^E dt = \mathbf{L}_2 - \mathbf{L}_1\]
La conservación del momento angular ocurre en muchos problemas que involucran cero pares externos\( \mathbf{N}^E = 0 \) más fuerzas centrales de dos cuerpos\( \mathbf{F} = f(r) \hat{\mathbf{r}} \) ya que el par en la partícula alrededor del centro de la fuerza es cero
\[\label{eq:2.50}\mathbf{N}= \mathbf{r} \times \mathbf{F} = f(r) [ \mathbf{r} \times \mathbf{ \hat{r}} ] = 0 \]
Ejemplos son, la fuerza gravitacional central para sistemas estelares o planetarios en astrofísica, y la fuerza electrostática central manifestada para el movimiento de electrones en el átomo. Además, el componente de momento angular alrededor de cualquier eje\( \mathbf{L} . \mathbf{\hat{e}} \) se conserva si el par externo neto alrededor de ese eje\( \mathbf{N} . \mathbf{\hat{e}} = 0\).
Ejemplo\(\PageIndex{1}\): Bolas thrown by gaucho
Considera las bolas lanzadas por un gaucho para atrapar ganado. Se trata de un sistema con momento lineal y angular conservado alrededor de ciertos ejes. Cuando las bolas salen de la mano del gaucho el centro de masa tiene una velocidad lineal\( \mathbf{V} \) y un momento angular alrededor del centro de masa de\( \mathbf{L} \). Si no actúan pares externos, entonces el centro de masa de las bolas seguirá una trayectoria balística típica en el campo gravitacional de la tierra mientras\( \mathbf{L} \) se conserva el vector de momento angular, es decir, tanto en magnitud como en dirección. La tensión en las cuerdas que conectan las tres bolas no afecta el movimiento del sistema siempre que las cuerdas no se ajusten debido a las fuerzas centrífugas.
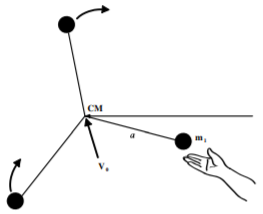
Figura\(\PageIndex{1}\): Bolas lanzadas por un guacho.
Figura\(\PageIndex{2}\): Un cazador que usa bolas mientras está montado sobre un caballo. (Dominio público; Pearson Scott Foresman)