2.12: Aplicaciones de las Ecuaciones de Movimiento de Newton
- Page ID
- 126834
La ecuación de movimiento de Newton se puede escribir en la forma
\[ \label{eq:2.90} \mathbf{F} = \frac{d\mathbf{p}}{dt} = m\frac{d\mathbf{v}}{dt} = m\frac{d^2\mathbf{r}}{dt^2} \]
Una descripción del movimiento de una partícula requiere una solución de esta ecuación diferencial de movimiento de segundo orden. Esta ecuación de movimiento puede integrarse para encontrar\(\mathbf{r}(t)\) y\(\mathbf{v}(t)\) si se\(\mathbf{F}(t)\) conocen las condiciones iniciales y el campo de fuerza. La solución de la ecuación del movimiento puede ser complicada para muchos ejemplos prácticos, pero existen diversos enfoques para simplificar la solución. Es de valor aprender enfoques eficientes para resolver problemas.
Se recomienda la siguiente secuencia
- Hacer un diagrama vectorial del problema indicando fuerzas, velocidades, etc.
- Anote las cantidades conocidas.
- Antes de intentar resolver la ecuación del movimiento directamente, mire para ver si se aplica una ley básica de conservación. Es decir, verificar si alguna de las tres integrales de primer orden, se puede utilizar para simplificar la solución. El uso de la conservación de energía o la conservación del impulso pueden simplificar enormemente la resolución de problemas.
Los siguientes ejemplos muestran la solución de tipos típicos de problemas encontrados usando mecánica newtoniana
Problemas de Fuerza Constante
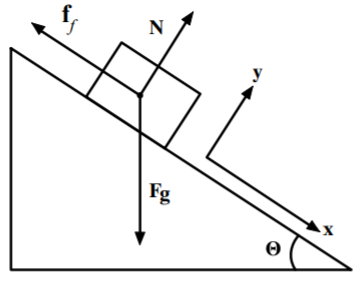
Los problemas al tener una fuerza constante implican una aceleración constante. El ejemplo clásico es un bloque que se desliza sobre un plano inclinado, donde el bloque de masa\(m\) es actuado tanto por gravedad como por fricción. La fuerza neta\(\mathbf{F}\) viene dada por la suma vectorial de la fuerza gravitacional\(\mathbf{F}_g \), la fuerza normal\( \mathbf{N}\) y la fuerza de fricción\( \mathbf{f}_f \)
\[ \label{eq:2.91} \mathbf{F} = \mathbf{F}_g + \mathbf{N + f}_f = m\mathbf{a} \]
Tomando componentes perpendiculares al plano inclinado en la\(y\) dirección
\[ \label{eq:2.92} -F_g \cos \theta + N = 0 \]
Es decir, ya que\( F_g = mg \)
\[ \label{eq:2.93} N = mg \cos \theta \]
Del mismo modo, tomar componentes a lo largo del plano inclinado en la\(x\) dirección
\[ \label{eq:2.94} F_g \sin \theta - f_f = m \frac{d^2 x}{dt^2} \]
Usando el concepto de coeficiente de fricción\( \mu \)
\[ \label{eq:2.95} f_f = \mu N \]
Así, la ecuación del movimiento puede escribirse como
\[ \label{eq:2.96} mg( \sin \theta - \mu \cos \theta ) = m \frac{d^2 x}{dt^2} \]
El bloque se acelera si\( \sin \theta > \mu \cos \theta \), es decir,\(\tan \theta > \mu \). La aceleración es constante si\( \mu \) y\( \theta \) son constantes, es decir
\[ \label{eq:2.97} \frac{d^2x}{dt^2} = g ( \sin \theta - \mu \cos \theta ) \]
Recuerde que si el bloque es estacionario, el coeficiente de fricción se equilibra tal\( ( \sin \theta - \mu \cos \theta ) = 0 \) que es decir,\( \tan \theta = \mu \). Sin embargo, existe un coeficiente máximo de fricción estática\( \mu _S \) más allá del cual el bloque comienza a deslizarse. El coeficiente cinético de fricción\( \mu_K \) es aplicable para fricción deslizante y generalmente\( \mu_K < \mu_S \)
Otro ejemplo de fuerza y aceleración constantes es el movimiento de objetos que caen libremente en un campo gravitacional uniforme cuando se descuida la resistencia aérea. Entonces se obtienen las relaciones simples tales\( v = u + at \), etc.
Fuerza de Restauración Lineal
Una clase importante de problemas involucra una fuerza restauradora lineal, es decir, obedecen la ley de Hooke. La ecuación de movimiento para este caso es
\[ \label{eq:2.98} F ( x ) = -kx = m \ddot{x} \]
Es habitual definir
\[ \label{eq:2.99} \omega_0 ^2 \equiv \frac{k}{m} \]
Entonces la ecuación de movimiento entonces puede escribirse como
\[ \label{eq:2.100} \ddot{x} + \omega_0^2 x = 0 \]
que es la ecuación del oscilador armónico. Ejemplos son pequeñas oscilaciones de una masa sobre un resorte, vibraciones de una cuerda de piano estirada, etc.
La solución de esta ecuación de segundo orden es
\[ \label{eq:2.101} x(t) = A \sin ( \omega _0 t - \delta ) \]
Este es el conocido comportamiento sinusoidal del desplazamiento para el oscilador armónico simple. La frecuencia angular\( \omega_0 \)
\[ \label{eq:2.102} \omega_0 = \sqrt{\frac{k}{m}} \]
Obsérvese que para este sistema lineal sin fuerzas disipativas, la energía total es una constante de movimiento como se discutió anteriormente. Es decir, es un sistema conservador con una energía total\(E\) dada por
\[ \label{eq:2.103} \frac{1}{2} m \dot{x} ^2 + \frac{1}{2} kx ^2 = E \]
El primer término es la energía cinética y el segundo término es la energía potencial. El teorema de Virial da que para la fuerza restauradora lineal la energía cinética promedio es igual a la energía potencial promedio.
Fuerzas conservadoras dependientes de la posición
La fuerza de restauración lineal es un ejemplo de un campo conservador. La energía total\(E\) se conserva, y si el campo es independiente del tiempo, entonces las fuerzas conservadoras son una función únicamente de posición. La forma más fácil de resolver este tipo de problemas es utilizar el concepto de energía potencial\(U\) ilustrado en la Figura\(\PageIndex{2}\).
\[ \label{eq:2.104} U_2 - U_1 = - \int_1^2 \mathbf{F} \cdot d \mathbf{x} \]
Considerar una fuerza conservadora en una dimensión. Como se demostró que la energía total\( E = T + U \) se conserva para un campo conservador, entonces
\[\label{2.105} E = T + U = \frac{1}{2} mv^2 + U (x) \]
Por lo tanto:
\[\label{2.106} v = \frac{dx}{dt} = \pm \sqrt{\frac{2}{m} [ E - U (x) ] } \]
Integración de esto da
\[\label{2.107} t - t_0 = \int_{x_0}^x \frac{\pm dx}{\sqrt{\frac{2}{m} [ E - U (x) ]}}\]
donde\( x = x_0 \) al\( t = t_0 \) Saber\( U(x) \) es posible resolver esta ecuación en función del tiempo.
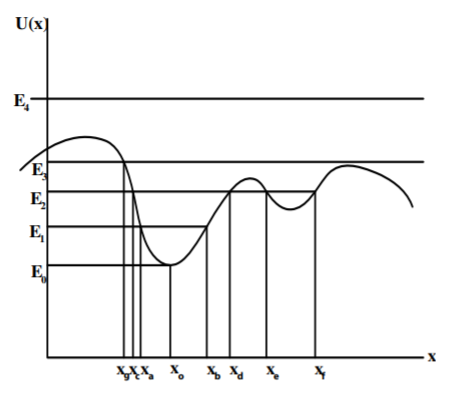
Es posible comprender las características generales de la solución solo a partir de la inspección de la función\( U(x) \). Por ejemplo, como se muestra en\(\PageIndex{2}\) la Figura el movimiento para la energía\( E_1 \) es periódico entre los puntos de inflexión\( x_a \) y\(x_b\). Dado que la curva de energía potencial es aproximadamente parabólica entre estos límites, el movimiento exhibirá un movimiento armónico simple. Para\( E_0 \) el punto de inflexión se unen a\( x_0 \) eso es que no hay movimiento. Para\( E_2 \) la energía total el movimiento es periódico en dos regímenes independientes,\( x_c \leq x \leq x_d \) y\( x_e \leq x \leq x_f \). Clásicamente la partícula no puede saltar de un bolsillo al otro. El movimiento para la partícula con energía total\( E_3 \) es que se mueve libremente desde el infinito, se detiene y rebota en\( x = x_g \) y luego regresa al infinito. Esa es la partícula rebota en el potencial en\( x_g \). Para obtener energía,\( E _4 \) la partícula se mueve libremente y no tiene límites. Para todos estos casos, la velocidad real viene dada por la relación anterior para\( v (x) \). Así la energía cinética es mayor donde el potencial es más profundo. Un ejemplo sería el movimiento de un carro de montaña rusa.
Las fuerzas dependientes de la posición se encuentran ampliamente en la mecánica clásica. Ejemplos son las muchas manifestaciones del movimiento en campos gravitacionales, como sondas interplanetarias, una montaña rusa y sistemas de suspensión de automóviles. La fuerza de restauración lineal es un ejemplo especialmente simple de una fuerza dependiente de la posición, mientras que los potenciales conservadores más frecuentemente encontrados están en electrostática y gravitación para la cual son los potenciales;
\[ \label{eq:ElecPot} \nonumber \tag{Electrostatic Potential energy} U(r) = \frac{1}{4 \pi \epsilon _0} \frac{q_1 q_2}{r_{12}^2} \]
\[ \label{eq:GravPot} \nonumber \tag{Gravitational Potential energy} U(r) = -G \frac{m_1 m_2}{r_{12}^2} \]
Sabiendo\( U (r) \) que es posible resolver la ecuación del movimiento en función del tiempo.
Ejemplo\(\PageIndex{1}\): Diatomic molecule
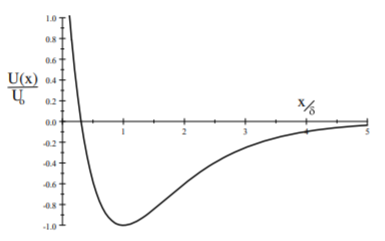
Un ejemplo de campo conservador es una molécula diatómica vibrante que tiene una dependencia energética potencial con distancia de separación\(x\) que se describe aproximadamente por la función Morse
\[ \nonumber U(x) = U_0 \Big [ 1 - e^{ - \frac{ ( x - x_0 )}{ \delta }} \Big ] ^2 - U_0 \]
donde\( U_0, x_0 \ and \ \delta \) se eligen los parámetros para describir mejor el par particular de átomos. La fuerza restauradora viene dada por
\[ \nonumber F(x) = - \frac{dU(x)}{dx} = 2 \frac{U_0}{ \delta } \Big [ 1 - e^{- \frac{ ( x - x_0 )}{ \delta }} \Big ] \Big [ e^{- \frac{ ( x - x_0 )}{ \delta }} \Big ] \]
Esto tiene un valor mínimo de\( U (x_0) = U_0 \) at\( x = x_0 \).
Tenga en cuenta que para pequeñas oscilaciones de amplitud, donde
\[ \nonumber ( x - x_0 ) < < \delta \]
el término exponencial en la función potencial se puede ampliar para dar
\[ \nonumber U(x) \approx U_0 \Bigg [ 1 - (1 - -\frac{ (x - x_0 )}{ \delta}) \Bigg ] ^2 - U_0 \approx \frac{U_0}{\delta ^2} ( x - x_0 ) ^2 - U_0 \]
Esto da una fuerza restauradora
\[ \nonumber F(x) = - \frac{dU(x)}{dx} = - 2 \frac{U_0}{ \delta} ( x - x_0 ) \]
Es decir, para pequeñas amplitudes la fuerza restauradora es lineal.
Movimiento restringido
Un problema frecuente con las fuerzas dependientes de la posición es cuando el movimiento se restringe a seguir una cierta trayectoria. Deben existir fuerzas de restricción para limitar el movimiento a una trayectoria específica. Los ejemplos son, la montaña rusa, una bola rodante sobre una superficie ondulada o un esquiador alpino, donde el movimiento se restringe para seguir los contornos de la superficie o de la pista. La energía potencial se puede evaluar en todas las posiciones a lo largo de la trayectoria restringida para fuerzas conservadoras como la gravedad. Sin embargo, las fuerzas adicionales de restricción que deben existir para limitar el movimiento, pueden ser complicadas y depender del movimiento. Por ejemplo, la montaña rusa siempre debe equilibrar las fuerzas gravitacionales y centrípetas. Afortunadamente las fuerzas de restricción\( \mathbf{F}_C \) a menudo son normales a la dirección del movimiento y por lo tanto no contribuyen a la energía mecánica total ya que entonces el trabajo realizado\( \mathbf{F} _C \cdot d \mathbf{l} \) es cero. Las fuerzas magnéticas\(\mathbf{F} =q\mathbf{v} \times \mathbf{B}\) exhiben esta característica de tener la fuerza normal al movimiento.
La solución de problemas restringidos se simplifica enormemente si las otras fuerzas son conservadoras y las fuerzas de restricción son normales al movimiento, ya que entonces se puede utilizar la conservación de energía.
Ejemplo\(\PageIndex{2}\): Roller coaster
Considera el movimiento de una montaña rusa que se muestra en la figura adyacente.

Este sistema es conservador si se descuida la fricción y el arrastre de aire y luego las fuerzas de restricción son normales a la dirección del movimiento. La energía cinética en cualquier posición viene dada por la conservación de energía y el hecho de que
\[ \nonumber E = T + U \]
donde\(U\) depende de la altura de la pista en cualquier ubicación dada. La energía cinética es mayor cuando la energía potencial es más baja. Las fuerzas de restricción se pueden deducir si se conoce la velocidad de movimiento en la pista. Suponiendo que el movimiento está confinado a un plano vertical, entonces uno tiene una fuerza centrípeta de restricción\( \frac{mv^2}{ \rho } \) normal a la pista hacia adentro hacia el centro del radio de curvatura\( \rho \), más la fuerza de gravitación hacia abajo de\(mg\).
La fuerza de restricción es\( \frac{mv^2_T}{ \rho } - mg \) hacia arriba en la parte superior del bucle, mientras que está\( \frac{mv^2_B}{ \rho } + mg\) hacia abajo en la parte inferior del bucle. Para que el carro y los ocupantes no dejen la trayectoria requerida, la fuerza hacia arriba en la parte superior del bucle tiene que ser positiva, es decir,\( v^2_T \geq \rho g \). La velocidad en la parte inferior del bucle viene dada\( \frac{1}{2} m v^2_B = \frac{1}{2}mv_T^2 + 2mg \rho \) asumiendo que la pista tiene un radio de curvatura constante\( \rho \). Es decir; a\( v^2 _B = \rho g + 4 \rho g = 5 \rho g \) lo mínimo Por lo tanto los ocupantes ahora sentirán una aceleración a la baja de al\( \frac{v^2_B}{\rho} + g = 6g \) menos en la parte inferior del bucle. La primera montaña rusa se construyó con un radio de curvatura tan constante pero una aceleración de\(6g\) fue demasiado para el pasajero promedio. Por lo tanto, las montañas rusas están diseñadas de tal manera que el radio de curvatura sea mucho mayor en la parte inferior del bucle, como se ilustra, con el fin de mantener\(g\) cargas suficientemente bajas y también asegurar que existan las fuerzas de restricción requeridas.
Tenga en cuenta que la velocidad mínima en la parte superior del bucle\( v_T \),, implica que si el carro comienza desde el reposo debe comenzar a una altura\( h \geqslant \frac{\rho}{2} \) por encima de la parte superior del bucle si la fricción es insignificante. Tenga en cuenta que la solución para la bola rodante en una montaña rusa de este tipo difiere de la de un objeto deslizante ya que se debe incluir la energía rotacional de la bola así como la velocidad lineal.
Hacer un bucle en un planeador implica la misma física, lo que hace necesario variar el control del elevador para variar el radio de curvatura a lo largo del bucle para minimizar la\(g\) carga máxima.
Fuerzas dependientes de la velocidad
Las fuerzas dependientes de la velocidad se encuentran frecuentemente en problemas prácticos. Por ejemplo, el movimiento de un objeto en un fluido, como el aire, donde las fuerzas viscosas retardan el movimiento. En general la fuerza retardadora tiene una complicada dependencia de la velocidad. La fuerza de arrastre generalmente se expresa en términos de un coeficiente de arrastre\(c_D\),
\[ \label{eq:2.108} \mathbf{F}_D(v) = -\frac{1}{2} c_D \rho A v^2 \mathbf{\hat{v}} \]
donde\( c_D \) es un coeficiente de arrastre adimensional,\( \rho \) es la densidad del aire,\( A \) es el área transversal perpendicular a la dirección del movimiento, y\( v \) es la velocidad. Los automóviles modernos tienen coeficientes de arrastre tan bajos como 0.3. Como se describe en el capítulo\(16\), el coeficiente de arrastre\( c_D \) depende del número de Reynold que relaciona las fuerzas de arrastre inercial con las viscosas. Los objetos de pequeño tamaño a baja velocidad, como las gotas de lluvia ligeras, tienen números bajos de Reynold para lo cual\( c_D \) es aproximadamente proporcional a\( v^{-1} \) conducir a una dependencia lineal de la fuerza de arrastre en la velocidad, es decir\( F_D (v) \propto v \). Los objetos más grandes que se mueven a velocidades más altas, como un automóvil o un buceador, tienen números de Reynold más altos para lo cual\( c_D \) es aproximadamente independiente de la velocidad que conduce a una fuerza de arrastre\( F_D (v) \propto v^2 \). Esta fuerza de arrastre siempre apunta en dirección opuesta al vector de velocidad unitaria. Aproximadamente para aire
\[ \label{eq:2.109} \mathbf{F}_D(v) = -(c_1v + c_2 v^2 ) \hat{v} \]
donde para objetos esféricos de diámetro\( D, c_1 \approx 1.55 \times 10^{-4} D \) y\( c_2 \approx 0.22D^2 \) y en unidades MKS. Afortunadamente, la ecuación del movimiento suele integrarse cuando la fuerza retardadora tiene una simple dependencia de la ley de poder. Como ejemplo, considere la caída libre en el campo gravitacional de la Tierra.
Ejemplo\(\PageIndex{3}\): Vertical fall in the earth's gravitational field.
Régimen lineal\( c_1 > > c_2 v \)
Para objetos pequeños a baja velocidad, es decir, bajo número de Reynold, el arrastre tiene aproximadamente una dependencia lineal de la velocidad. La ecuación del movimiento es
\[ \nonumber -mg -c_1 v =m \frac{dv}{dt} \]
Separar las variables e integrar
\[ \nonumber t = \int_{v_0}^v \frac{m dv}{-mg - c_1 v } = -\frac{m}{c_1} \ln \bigg ( \frac{mg + c_1 v}{mg + c_1v_0} \bigg ) \]
Eso es
\[ \nonumber v = -\frac{mg}{c_1} + \bigg ( \frac{mg}{c_1} + v_0 \bigg ) e^{-\frac{c_1}{m} t} \]
Tenga en cuenta que para\( t \gg \frac{m}{c_1} \) la velocidad se acerca a una velocidad terminal de\( v_\infty = -\frac{mg}{c_1} \). La constante de tiempo característica es\( \tau = \frac{m}{c_1} = \frac{v_\infty}{g} \). Tenga en cuenta que si\( v_0 = 0 \), entonces
\[ \nonumber v = v_\infty \Big ( 1 - e^{-\frac{t}{\tau}} \Big ) \]
Para el caso de pequeñas gotas de lluvia con\( D = 0.5 mm \) entonces\( v_\infty = 8 \ m/s \ (18 \ mph) \) y constante de tiempo\( \tau = 0.8 s \). Tenga en cuenta que en ausencia de arrastre de aire, estas gotas de lluvia que caen desde los 2000 m alcanzarían una velocidad de más de 400 mph. Es una suerte que el arrastre reduzca la velocidad de las gotas de lluvia a valores no dañinos. Obsérvese que la relación anterior predeciría altas velocidades para granizo. Afortunadamente, la resistencia aumenta cuadráticamente a las velocidades más altas alcanzadas por las grandes gotas de lluvia o granizo, lo que limita la velocidad terminal a valores moderados. Como se sabe en el medio oeste, estas velocidades aún son suficientes para causar daños considerables a los cultivos.
Régimen cuadrático\( \hspace{4 cm} c_2v > > c_1 \)
Para objetos más grandes a velocidades más altas, es decir, un número alto de Reynold, el arrastre depende del cuadrado de la velocidad, lo que hace necesario diferenciar entre objetos que suben y caen. La ecuación del movimiento es
\[ \nonumber -mg \pm c_2v^2 = m\frac{dv}{dt} \]
donde el signo positivo es para objetos que caen y signo negativo para objetos ascendentes. Integrar la ecuación de movimiento para caer da
\[ \nonumber t = \int_{v_0}^v \frac{mdv}{-mg + c_2v^2} = \tau \bigg ( \tanh^{-1} \frac{v_0}{v_\infty} - \tanh^{-1} \frac{v}{v_\infty} \bigg ) \]
donde\( \tau = \sqrt{\frac{m}{c_2g}} \) y es\( v_\infty = \sqrt{\frac{mg}{c_2}} \) decir,\( \tau = \frac{v_\infty}{g} \) para el caso de un objeto que cae con\( v_0 = 0 \) resolución por velocidad da
\[ v = v_\infty \tanh \frac{t}{ \tau} \nonumber\]
Como ejemplo, una canasta de 0.6 kg con\(D\) = 0.25 m tendrá\( v_\infty = 20 m/s \) (43 mph) y\( \tau = 2.1 \ s \).
Considera al presidente George H.W. Bush paracaidismo. Asumir que su masa es de 70 kg y asumir una forma esférica equivalente del expresidente para tener un diámetro de\( D = 1 \ m \) Esto da eso\( v_\infty = 56 \ m/s \) (120 mph) y\( \tau = 5.6 \ s \). Cuando Bush senior abre su paracaídas de 8 m de diámetro, se estima que su velocidad terminal disminuirá a 7 m/s (15 mph), lo que está cerca del valor de un paracaídas de emergencia típico (8m) de diámetro que tiene una velocidad terminal medida de 11 mph a pesar de la fuga de aire a través del respiradero central necesario para proporcionar estabilidad.
Ejemplo\(\PageIndex{4}\): Projectile motion in air
Considere un proyectil inicialmente a\(x = y = 0\), a\(t = 0\), que se dispara a una velocidad inicial v\( v_0 \) en ángulo\( \theta \) con la horizontal. Para entender las características generales de la solución, supongamos que el arrastre es proporcional a la velocidad. Esto es incorrecto para las velocidades típicas de proyectiles, pero simplifica las matemáticas. Las ecuaciones de movimiento se pueden expresar como
\[ \nonumber m \ddot{x} = - km \ddot{x} \]
\[ \nonumber m \ddot{y} = - km \dot{y} - mg \]
donde k es el coeficiente de arrastre de aire. Tome las condiciones iniciales en\(t = 0\) ser\(x = y = 0\),\( \dot{x} = v_o \cos \theta, \dot{y} = v_o \sin \theta \).
Resolviendo en la\(x\) coordenada,
\[ \nonumber \frac{ d\mathbf{x} }{dt} = -k \dot{x} \]
Por lo tanto
\[ \nonumber \dot{x} = v_o \cos \theta e ^{-kt} \]
Es decir, la velocidad decae a cero con una constante de tiempo\( \tau = \frac{1}{k} \)
La integración de la ecuación de velocidad da
\[ \nonumber x = \frac{v_o}{k} ( 1 - e ^{-kt} ) \]
Tenga en cuenta que esto implica que el cuerpo se acerca a un valor de\( x =\frac{v_o}{k} \) como\( t \rightarrow \infty \)
La trayectoria de un objeto se distorsiona a partir de la forma parabólica, que ocurre para\(k = 0\), debido a la rápida caída en el rango a medida que aumenta el coeficiente de arrastre. Para casos realistas es necesario utilizar una computadora para resolver esto numéricamente.
Sistemas con Masa Variable
Ejemplos clásicos de sistemas con masa variable son el cohete, la fisión nuclear y otros modos de desintegración nuclear.
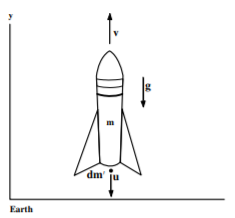
Considera el problema del movimiento de cohetes en un campo gravitacional. Cuando hay un campo externo gravitacional vertical, el momento vertical no se conserva debido tanto a la gravedad como a la expulsión del propulsor del cohete. En un tiempo\(dt\) el cohete expulsa propelente\(dm_p \) con velocidad de escape relativa al cohete de\(u\). Así, el impulso impartido a este propulsor es
\[ \label{eq:2.110} dp_p = -udm_p \]
Por lo tanto, al cohete se le da un incremento igual y opuesto de impulso
\[\label{eq:2.111} dp_R = +udm_p \]
En el intervalo de tiempo\(dt\) el cambio neto en el momento lineal del cohete más el sistema de combustible viene dado por
\[ \label{eq:2.112} dp = (m - dm_p ) ( v + dv) + dm_p (v - u ) - mv = mdv - udm_p \]
La tasa de cambio del momento lineal, por lo tanto, es igual
\[\nonumber F_{ex} = \frac{dp}{dt} = m\frac{dv}{dt} - u \frac{dm_p}{dt} \]
Considerar el problema para el caso especial de ascenso vertical del cohete contra la fuerza gravitacional externa\( F_{ex} = -mg \). Entonces
\[ \label{eq:2.113} -mg + u\frac{dm_p}{dt} = m\frac{dv}{dt} \]
Esto se puede reescribir como
\[ \label{eq:2.114} -mg + u\dot{m}_p = m\dot{v} \]
El segundo término proviene de la masa variable. Pero la pérdida de masa del cohete equivale a la masa del propulsor expulsado. Asumiendo una combustión constante de combustible\( \dot{m}_p = \alpha \) entonces
\[ \label{eq:2.115} \dot{m} = -\dot{m}_p = -\alpha \]
donde\( \alpha > 0 \) Entonces la ecuación se convierte
\[ \label{eq:2.116} dv = \big ( -g + \frac{ \alpha}{m} u \big ) dt \]
Desde
\[ \label{eq:2.117} \frac{dm}{dt} = -\alpha \]
entonces
\[\label{eq:2.118} - \frac{dm}{\alpha} = dt \]
Insertar esto en la ecuación anterior da
\[ \label{eq:2.119} dv = \big ( \frac{g}{\alpha} - \frac{u}{m} \big ) dm \]
La integración da
\[ \label{eq:2.120} v = - \frac{g}{\alpha} ( m_0 - m ) + u \ln \big ( \frac{m_0}{m} \big ) \]
Pero el cambio en la masa viene dado por
\[ \label{eq:2.121} \int_{m_0}^m dm = - \alpha \int_0^t dt \]
Eso es
\[ \label{eq:2.122} m_0 - m = \alpha t \]
Así
\[ \label{eq:2.123} v = -gt + u \ln \big ( \frac{m_0}{m} \big ) \]
Tenga en cuenta que una vez que se agote el propulsor, el cohete continuará volando hacia arriba a medida que desacelera en el campo gravitacional. Se puede calcular fácilmente la altura máxima. Obsérvese que esta fórmula supone que la aceleración debida a la gravedad es constante mientras que para grandes alturas sobre la Tierra es necesario utilizar la verdadera fuerza gravitacional\( - G \frac{Mm}{r^2} \) donde\(r\) está la distancia desde el centro de la tierra. En situaciones reales es necesario incluir arrastre de aire que requiere de una computadora para resolver numéricamente las ecuaciones de movimiento. La velocidad más alta del cohete se alcanza maximizando la velocidad de escape y la relación entre la masa inicial y la masa final. Debido a que la velocidad terminal está limitada por la relación de masa, los ingenieros construyen cohetes multietapa que expulsan los contenedores de combustible gastado y los cohetes. El enfoque de principio variacional aplicado a problemas de masa variable se discute en el capítulo\(8.7\)
Rotación de cuerpo rígido alrededor de un eje de rotación fijo al cuerpo
El caso más general de rotación de cuerpo rígido implica la rotación alrededor de algún punto fijo al cuerpo con la orientación del eje de rotación indefinida. Por ejemplo, un objeto que gira en el espacio girará alrededor del centro de masa con el eje de rotación teniendo cualquier orientación. Otro ejemplo es la peonza de un niño que gira con orientación arbitraria del eje de rotación alrededor del extremo puntiagudo que toca el suelo alrededor de una ubicación estática. Dicha rotación alrededor de un punto fijo al cuerpo es complicada y se discutirá en el capítulo\(13\). La rotación del cuerpo rígido es más fácil de manejar si la orientación del eje de rotación es fija con respecto al cuerpo rígido. Un ejemplo de tal movimiento es una puerta abatible.
Para un cuerpo rígido que gira con velocidad angular,\( \omega \) el momento angular total\(\mathbf{L}\) viene dado por
\[ \label{eq:2.124} \mathbf{L} = \sum_i^n \mathbf{L}_i = \sum_i^n \mathbf{r}_i \times \mathbf{p}_i \]
Para la ecuación de rotación apéndice\(19.4.29\) da
\[\label{eq:2.94b} \mathbf{v}_i = \mathbf{ \omega} \times \mathbf{r}_i \]
así el momento angular se puede escribir como
\[ \label{eq:2.125} = \sum_i^n \mathbf{r}_i \times \mathbf{p}_i = \sum_i^n m_i \mathbf{r}_i \times \mathbf{\omega} \times \mathbf{r}_i \]
Esto se puede simplificar usando la ecuación de identidad vectorial\(19.2.24\) que da
\[ \label{eq:2.126} \mathbf{L} = \sum_i^n [ \big ( m_i r_i ^2 \big ) \mathbf{ \omega} - ( \mathbf{r}_i \cdot \mathbf{\omega} ) m_i \mathbf{r}_i ] \]
Rotación de cuerpo rígido alrededor de un eje de simetría fijo al cuerpo
El caso más simple para la rotación de cuerpo rígido es cuando el cuerpo tiene un eje de simetría con la velocidad angular\( \mathbf{\omega} \) paralela a este eje de simetría fijo al cuerpo. Para este caso entonces se\( \mathbf{r}_i \) puede tomar perpendicular a\( \mathbf{\omega} \) para lo cual el segundo término en la Ecuación\ ref {eq:2.126}, es decir\( \mathbf{r}_i \cdot \omega = 0\), así
\[ \nonumber \label{RigidBody} \tag{ \( \mathbf{r}_i \ perpendicular \ to \ \mathbf{\omega}\)} \mathbf{L}_{sym } = \sum_i^n \big ( m_ir_i^2 \big ) \omega \]
El momento de inercia alrededor del eje de simetría se define como
\[ \label{eq:2.127} I_{sym} = \sum_i^n m_ir_u^2 \]
donde\( r_i \) esta la distancia perpendicular desde el eje de rotación al cuerpo,\( m_i \) Para un cuerpo continuo el momento de inercia puede generalizarse a una integral sobre la densidad\(\rho\) de masa del cuerpo
\[ \label{eq:2.128} I_{sym} = \int \rho r^2 dV \]
donde\( r \) es perpendicular al eje de rotación. La definición del momento de inercia permite reescribir el momento angular alrededor de un eje de simetría\( \mathbf{L}_{sym} \) en la forma
\[ \label{eq:2.129} \mathbf{L}_{sym} = I_{sym}\mathbf{\omega} \]
donde\( I_{sym} \) se toma el momento de inercia alrededor del eje de simetría y suponiendo que el vector de velocidad angular de rotación es paralelo al eje de simetría.
Rotación de cuerpo rígido alrededor de un eje fijo de cuerpo no simétrico
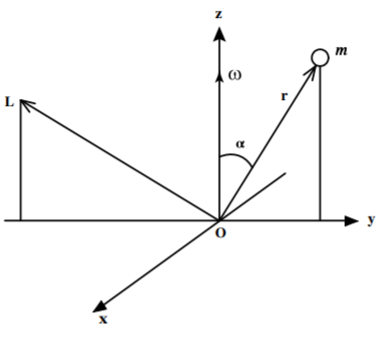
En general el eje fijo de rotación no está alineado con un eje de simetría del cuerpo, o bien el cuerpo no tiene un eje de simetría, lo cual complica el problema. Para ilustración, considere que el cuerpo rígido comprende un sistema de\( n \) masas\( m_i \) ubicadas en posiciones\( \mathbf{r}_i \) con el cuerpo rígido girando alrededor del\( z \) eje con velocidad angular Es\( \mathbf{\omega} \) decir,
\[ \label{eq:2.130} \mathbf{\omega} = \omega_z \hat{\mathbf{z}} \]
En las coordenadas cartesianas, el vector de marco fijo para la partícula i es
\[ \label{eq:2.131} \mathbf{r}_i = ( x_i, y_i, z_i ) \]
usando estos en el producto cruzado\ ref {eq:2.94b} da
\[ \label{eq:2.132} \mathbf{v}_i = \mathbf{\omega} \times \mathbf{r}_i = \begin{pmatrix} -\omega_z y_i \\ \omega_z x_i \\ 0 \end{pmatrix} \]
que se escribe como un vector de columna para mayor claridad. La inserción\( \mathbf{v}_i \) en el producto cruzado\( \mathbf{r}_i \times \mathbf{v}_i \) da los componentes del momento angular a ser
\[ \nonumber \mathbf{L} = \sum_i^n m_i \mathbf{r}_i \times \mathbf{v}_i \sum_i^n m_i \omega_z \begin{pmatrix} -z_ix_i \\ -z_iy_i \\ x_i^2 + y_i^2 \end{pmatrix} \]
Es decir, los componentes del momento angular son
\[ \label{eq:2.133} \begin{align} L_x & = & - \bigg ( \sum_i^n m_i z_i x_i \bigg ) \omega_z \equiv I_{xz} \omega_z \\ L_y & = & - \bigg ( \sum_i^n m_i z_i y_i \bigg ) \omega_z \equiv I_{yz} \omega_z \notag \\ L_z & = & - \bigg ( \sum_i^n m_i [ x_i^2 + y_i^2 ] \bigg ) \omega_z \equiv I_{xz} \omega_z \notag \end{align} \]
Tenga en cuenta que la distancia perpendicular desde el\(z\) eje en coordenadas cilíndricas es,\( \rho = \sqrt{x_i^2 y_i^2} \) por lo tanto, el momento angular\( L_z \) alrededor\(z\) del eje se puede escribir como
\[ \label{eq:2.134} L_z = \bigg ( \sum_i^n m_i \rho^2 \bigg ) \omega _z = I _{zz} \omega_z \]
donde\ ref {eq:2.134} da la fórmula elemental para el momento de inercia\( I_{zz} = I_{sym} \) alrededor del\(z\) eje dado anteriormente en\ ref {eq:2.129}. El resultado sorprendente es que\( L_x \) y\( L_y \) son distintos de cero, lo que implica que el vector de momento angular total en general no\(\mathbf{L}\) es paralelo con\( \mathbf{\omega} \) Esto se puede entender considerando el cuerpo único que\(m\) se muestra en la Figura\(\PageIndex{6}\). Cuando el cuerpo está en el\( y, z \) avión entonces\(x = 0\) y\( L_x = 0 \). Así, el vector de momento angular\(\mathbf{L}\) tiene una componente a lo largo de la\(−y\) dirección como se muestra la cual no es paralela\(\omega\) y, dado que los vectores\( \mathbf{ \omega, L, r}_i \) son coplanarios, entonces\(\mathbf{L}\) debe barrer alrededor del eje de rotación\(\omega\) para permanecer coplanar con el cuerpo a medida que gira alrededor el\( \omega \) eje. Instantáneamente la velocidad del cuerpo\( v_i \) se introduce en el plano del papel y, desde entonces\( \mathbf{L}_i = m_i\mathbf{r}_i \times \mathbf{v}_i \),\(\mathbf{L}_i\) está en ángulo\((90^\circ − \alpha)\) con\(z\) respecto al eje. Esto implica que se debe aplicar un par para rotar el vector de momento angular. Esto explica por qué su automóvil tiembla si el eje de rotación y el eje de simetría no son paralelos para una rueda.
Los dos primeros momentos en\ ref {eq:2.133} se denominan productos de inercia del cuerpo designados por el par de ejes involucrados. Por lo tanto, para evitar confusiones, es necesario definir el momento diagonal, que se llama el momento de inercia, por dos subíndices como\( I_{zz} \) Así en general, un cuerpo puede tener tres momentos de inercia alrededor de los tres ejes más tres productos de inercia. Este grupo de momentos comprende el tensor de inercia que se discutirá más adelante en el capítulo\(13\). Si un cuerpo tiene un eje de simetría a lo largo del\(z\) eje, entonces las sumataciones darán\( I_{xz} = I_{yz} = 0 \) while\( I_{zz} \) permanecerán inalteradas. Es decir, para la rotación alrededor de un eje de simetría el momento angular y los ejes de rotación son paralelos. Para cualquier eje a lo largo del cual coincidan el momento angular y la velocidad angular se denomina eje principal del cuerpo.
Ejemplo\(\PageIndex{5}\): Moment of inertia of a thin door
Considera que la puerta tiene ancho a y altura b y asume que el grosor de la puerta es despreciable con densidad de área\(\sigma kg/m^2 \). Supongamos que la puerta está articulada alrededor del\(y\) eje. La masa de un elemento superficial de dimensión\( dx \cdot dy \) a una\(x\) distancia del eje de rotación es\( dm = \sigma dx dy \) así la masa de la puerta completa es\( M = \sigma a b \). El momento de inercia alrededor del\(y\) eje viene dado por
\[ \nonumber I = \int_{x=0}^a \int_{y = 0}^b \sigma x^2 dydx = \frac{1}{3} \sigma b a^3 = \frac{1}{3} M a^2 \]
Ejemplo\(\PageIndex{6}\): Merry-go-round
Un hijo de masa m salta al borde exterior de un tiovivo circular de momento de inercia\(I\), y radio\(R\) y velocidad angular inicial\( \omega_0 \) ¿Cuál es la velocidad angular final\( \omega _f \)? Si el momento angular inicial es\( L_0 \) y, asumiendo que el niño salta con velocidad angular cero, entonces la conservación del momento angular implica que
\[ \begin{align*} L_0 & = & L_f \\ I\omega_0 & = & I_\omega + mv_fR \\ I \frac{v_0}{R} & =& \frac{v_f}{R} ( I + mR^2 ) \end{align*} \]
Eso es
\[ \frac{v_f}{v_0} = \frac{\omega_f}{\omega_0} = \frac{I}{I + mR^2} \]
Tenga en cuenta que esto es cierto independientemente de los detalles de la aceleración del niño inicialmente estacionario.
Ejemplo\(\PageIndex{7}\): Cue pushes a billiard ball
Considera que una bola de billar de masa\(M\) y radio\(R\) es empujada por un taco en una dirección que pasa por el centro de gravedad de tal manera que la bola alcanza una velocidad\( v_0 \). El coeficiente de fricción entre la mesa y la pelota es\( \mu \). ¿Qué tan lejos se mueve la pelota antes de que el movimiento inicial de deslizamiento cambie a puro movimiento rodante?
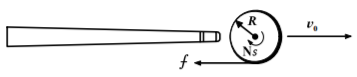
Dado que la dirección de la fuerza cue pasa a través del centro de masa de la bola, aporta un par cero a la bola. Por lo tanto, el momento angular inicial es cero en\(t = 0\). La fuerza de fricción\(f\) apunta opuesta a la dirección del movimiento y provoca un par\( N_s \) alrededor del centro de masa en la dirección\( \hat{s} \)
\[ \nonumber \mathbf{N}_s = \mathbf{f} \cdot \mathbf{R} = \mu M g R \]
Dado que el momento de inercia alrededor del centro de una esfera uniforme es\( I =\frac{2}{5}MR^2 \) entonces la aceleración angular de la bola es
\[ \nonumber \tag{\( \alpha \)} \dot{\omega} = \frac{\mu M g R}{I} = \frac{ \mu M g R}{\frac{2}{5} MR ^2} = \frac{5}{2} \frac{\mu g}{R} \]
Además, la fuerza de fricción provoca una desaceleración\( a_s \) de la velocidad lineal del centro de masa de
\[ \nonumber \tag{\( \alpha \)} a_s = - \frac{f}{M} = - \mu g \]
Integrando\( \alpha \) de tiempo cero a t da
\[ \nonumber \omega = \int_0^t \dot{\omega} dt = \frac{5}{2} \frac{ \mu g}{R} t \]
La velocidad lineal del centro de masa en el tiempo\(t\) viene dada por la integración de la ecuación\( \beta \)
\[ \nonumber v_s = \int_0^t a_s dt = v_0 - \mu gt \]
La bola de billar deja de deslizarse y solo rueda cuando\( v_s = \omega R \), es decir, cuando
\[ \nonumber \frac{5}{2} \frac{\mu g }{R} tR = v_0 - \mu gt \]
Es decir, cuando
\[ \nonumber t_{roll} = \frac{2}{7} \frac{v_0}{\mu g} \]
Así la pelota se desliza por una distancia
\[ \nonumber s = \int_0^{t_{roll}} v_s dt = v_0 t_{roll} - \frac{\mu gt_{roll}^2}{2} = \frac{12}{49} \frac{v_0^2}{\mu g } \]
Tenga en cuenta que si la bola es empujada a una distancia h por encima del centro de masa, además de la velocidad lineal hay un momento angular inicial de
\[ \omega = \frac{M v_0 h }{ \frac{2}{5} MR^2} = \frac{5}{2} \frac{v_o h}{R^2} \]
Para el caso\( h = \frac{2}{5} R \) entonces la pelota asume inmediatamente un puro rollo no deslizante. Para\( h < \frac{2}{5} R \) uno tiene\( \omega < \frac{v_0}{R} \) mientras\( h > \frac{2}{5} R \) corresponde a\( \omega > \frac{v_0}{R} \). En este último caso la fuerza de fricción apunta hacia adelante.
Fuerzas dependientes del tiempo
Muchos problemas implican la acción ante la presencia de una fuerza dependiente del tiempo. Hay dos casos extremos que a menudo se encuentran. Una es una fuerza impulsiva que actúa por muy poco tiempo, por ejemplo, golpear una pelota con un bate, o la colisión de dos autos mientras que la segunda fuerza es una fuerza oscilatoria dependiente del tiempo. La respuesta a las fuerzas impulsivas se discute a continuación, mientras que la respuesta a las fuerzas oscilatorias dependientes del tiempo se discute en el capítulo\(3\).
Fuerzas impulsivas traslacionales
Una fuerza impulsiva actúa por un tiempo muy corto en relación con el tiempo de respuesta del sistema mecánico que se está discutiendo. En principio la ecuación del movimiento puede resolverse si se conoce la complicada dependencia temporal de la fuerza.\(F(t)\) Sin embargo, muchas veces es posible utilizar el enfoque mucho más simple empleando el concepto de impulso y el principio de la conservación del impulso lineal.
Definir el impulso lineal como la integral temporal de primer orden de la fuerza dependiente del tiempo.
\[ \label{eq:2.135} \mathbf{P} = \int \mathbf{F} (t) dt \]
Desde\( \mathbf{F} (t) = \frac{d\mathbf{p}}{dt} \) entonces, la ecuación\ ref {eq:2.135} da que
\[ \label{eq:2.136} \mathbf{P} = \int_0^t \frac{d\mathbf{p}}{dt^\prime}dt^\prime = \int_0^t d\mathbf{p} =\mathbf{p}(t) - \mathbf{p}_0 = \Delta \mathbf{p} \]
Así, el impulso\(\mathbf{P}\) es una cantidad inequívoca que equivale al cambio en el impulso lineal del objeto que ha sido golpeado que es independiente de los detalles de la dependencia temporal de la fuerza impulsiva. El cálculo del movimiento espacial aún requiere conocimiento\(F(t)\) ya que la\ ref {eq:2.136} puede escribirse como
\[ \label{eq:2.137} \mathbf{v}(t) = \frac{1}{m} \int_0^t \mathbf{F}(t^\prime) dt^\prime + \mathbf{v}_0 \]
La integración da
\[ \label{eq:2.138} \mathbf{r}(t) - \mathbf{r}_0 = \mathbf{v}_0 t + \int_0^t \Bigg [ \frac{1}{m} \int_0^{t^{\prime \prime}} \mathbf{F} (t^\prime ) dt^\prime \Bigg ] dt^{\prime \prime } \]
En general esto es complicado. Sin embargo, para el caso de una fuerza constante\( \mathbf{F}(t) = \mathbf{F}_0 \), esto simplifica a la ecuación de aceleración constante
\[ \label{eq:2.139} \mathbf{r}(t) - \mathbf{r}_0 = \mathbf{v}_0 t + \frac{1}{2} \frac{\mathbf{F}_0}{m}t^2 \]
donde la aceleración constante\( \mathbf{a} = \frac{\mathbf{F}_0}{m} \).
Torques impulsivos angulares
Tenga en cuenta que el principio de impulso también se aplica al movimiento angular. Defina un par impulsivo como la integral de tiempo de primer orden del par dependiente del tiempo.
\[ \label{2.140} \mathbf{T} \equiv \int \mathbf{N} (t) dt \]
Dado que el par está relacionado con la tasa de cambio del momento angular
\[ \label{2.141} \mathbf{N} (t) = \frac{d\mathbf{L}}{dt} \]
entonces
\[ \label{2.142} \mathbf{T} = \int_0^t \frac{d\mathbf{L}}{dt^\prime} dt^\prime = \int_0^t d\mathbf{L} = \mathbf{L}(t) - \mathbf{L}_0 = \Delta \mathbf{L} \]
Así, el par impulsivo\(\mathbf{T}\) equivale al cambio en el momento angular\(\Delta \mathbf{L}\) del cuerpo golpeado.
Ejemplo\(\PageIndex{8}\): Center of percussion of a baseball bat
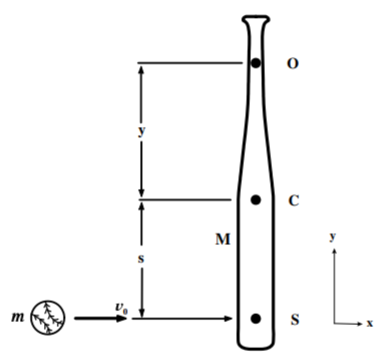
Cuando una fuerza impulsiva\(P\) golpea un murciélago de masa\(M\) a una\(\mathbf{s}\) distancia del centro de masa, entonces se cambian tanto el impulso lineal del centro de masa, como los momentos angulares alrededor del centro de masa, del murciélago. Supongamos que la pelota golpea al bate con una fuerza impulsiva\( P = \Delta p ^{ball} \) perpendicular al eje de simetría del bate en el punto de ataque\(S\) que es una\(s\) distancia del centro de masa del bate. El impulso traslacional dado al bate equivale al cambio en el impulso lineal de la pelota dado por la Ecuación\ ref {eq:2.136} junto con la conservación del impulso lineal
\[ \nonumber \mathbf{P} = \Delta\mathbf{p}_{cm}^{bat} = M \Delta\mathbf{v}_{cm}^{bat} \]
Similarmente, la ecuación\ ref {2.142} da que el impulso angular\(T\) es igual al cambio en el momento angular alrededor del centro de masa a ser
\[ \mathbf{T} = s \times \mathbf{P} = \Delta \mathbf{L} = I_{cm} \Delta \omega_{cm} \]
Las ecuaciones anteriores dan que
\[ \nonumber \begin{align*} \Delta \mathbf{v}_{cm}^{bat} & = & \frac{\mathbf{P}}{M} \\ \Delta \mathbf{\omega} & = & \frac{\mathbf{s} \times \mathbf{P}}{\mathbf{I}_{cm}} \end{align*} \]
Supongamos que el murciélago estaba estacionario antes del golpe, luego después del golpe la velocidad traslacional neta de un punto\(O\) a lo largo del eje de simetría fijado al cuerpo del bate a una\(y\) distancia del centro de masa, viene dada por
\[ \nonumber \mathbf{v} (y) = \Delta \mathbf{v}_{cm} + \Delta \omega_{cm} \times \mathbf{y} = \frac{\mathbf{P}}{M} + \frac{1}{I_cm}( ( \mathbf{s} \times \mathbf{P} ) \times y ) = \frac{\mathbf{P}}{M} + \frac{1}{I_{cm}} [ ( \mathbf{s \cdot y ) P - (s \cdot P ) y }] \]
Se supone que\(P\) y\(s\) son perpendiculares y así lo\( \mathbf{s \times P } = 0 \) que simplifica la ecuación anterior para
\[ \nonumber \mathbf{v} (y) = \Delta \mathbf{v}_{cm} + \Delta \mathbf{\omega}_{cm} \times \mathbf{y} = \frac{\mathbf{P}}{M} \bigg ( 1 + \frac{M ( \mathbf{s \cdot y} )}{I_{cm}} \bigg ) \]
Tenga en cuenta que la velocidad de traslación de la ubicación\(O\), a lo largo del eje de simetría del murciélago a una\(y\) distancia del centro de masa, es cero si el corchete es igual a cero, es decir, si
\[ \nonumber \mathbf{s \cdot y} = - \frac{I_{cm}}{M} = - k^2_{cm} \]
donde\( k_{cm} \) se llama el radio de giro del cuerpo alrededor del centro de masa. Tenga en cuenta que cuando el producto escalar\( s \cdot y = - \frac{I_{cm}}{M} = -k^2_{cm} \) entonces no habrá movimiento de traslación en el punto\(O\). Este punto en el\(y\) eje se encuentra en el lado opuesto del centro de masa del punto de ataque\(S\), y se denomina centro de percusión correspondiente al impulso en el punto\(S\). El centro de percusión a menudo se conoce como el “punto dulce” para un objeto correspondiente al impulso en el punto\(S\). Para un bate de béisbol el bateador sostiene al bate en el centro de percusión para que no sientan un impulso en sus manos cuando la pelota es golpeada en el punto\(S\). Este principio es ampliamente utilizado para diseñar murciélagos para todos los deportes que implican golpear una pelota con un bate, como, cricket, squash, tenis, etc. así como armas como espadas y hachas utilizadas para decapitar a los oponentes.
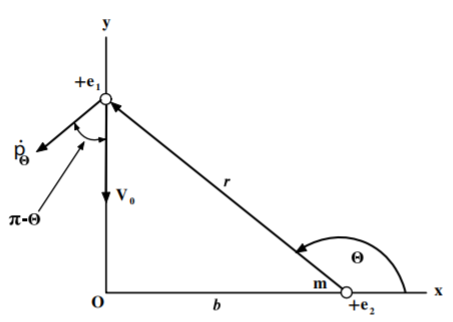
Ejemplo\(\PageIndex{9}\): Energy transfer in charged-particle scattering
Considera una partícula de carga que\( + e_1 \) se mueve con velocidad muy alta\( v_0 \) a lo largo de una línea recta que pasa una\(b\) distancia de otra carga\( + e_2 \) y masa\(m\). Encuentra la energía\(Q\) transferida a la masa\(m\) durante el encuentro asumiendo que la fuerza viene dada por la ley de Coulomb. Dado que la partícula cargada\( e_1 \) se mueve a muy alta velocidad se supone que la carga 2 no cambia de posición durante el encuentro. Supongamos que la carga 1 se mueve a lo largo del\(−y\) eje a través del origen mientras que la carga 2 se encuentra en el\(x\) eje en\(x = b\). Consideremos el impulso dado para cargar 2 durante el encuentro. Por simetría, el\(y\) componente debe cancelarse mientras que el\(x\) componente está dado por
\[ \nonumber dp_x = F_xdt = -\frac{e_1e_2}{4 \pi \epsilon_0r^2} \cos \theta dt = -\frac{e_1e_2}{4 \pi \epsilon_0r^2} \cos \theta \frac{dt}{d \theta}d\theta \]
Pero
\[ \nonumber r\dot{\theta} = - v_0 \cos \theta \]
donde
\[\nonumber \frac{b}{r} = \cos ( \pi - \theta ) = -\cos \theta \]
Así
\[\nonumber dp_x = -\frac{e_1e_2}{4 \pi \epsilon_0 b v_0} \cos \theta d\theta \]
Integrar de\( \frac{\pi}{2} < \theta < \frac{3 \pi}{2} \) da que el impulso total impartido a\( e_2 \) es
\[\nonumber p_x = -\frac{e_1 e_2}{4 \pi \epsilon_0 b v_0} \int_{\frac{\pi}{2}}^{\frac{3 \pi}{2}} \cos \theta d \theta = \frac{e_1 e_2}{2 \pi e_0 b v_0} \]
Así, la energía de retroceso de la carga 2 viene dada por
\[\nonumber E_2 = \frac{p_x ^2}{2m} = \frac{1}{2m} \bigg ( \frac{e_1e_2}{2 \pi e_0 b v_0} \bigg ) ^2 \]