
3.4: Representaciones geométricas del movimiento dinámico
- Page ID
- 126294
Las poderosas capacidades de reconocimiento de patrones del cerebro humano, junto con representaciones geométricas del movimiento de los sistemas dinámicos, proporcionan una sonda sensible de movimiento periódico. La geometría del movimiento a menudo puede proporcionar más información sobre la dinámica que la inspección de funciones matemáticas. Un sistema con\(n\) grados de libertad se caracteriza por ubicaciones\( q_i \)\( \dot q_i \), velocidades y momentos\( p_i \), además del tiempo\(t\) y la energía instantánea\( H(t) \). Las representaciones geométricas de las correlaciones dinámicas se ilustran mediante las representaciones de espacio de configuración y espacio de fase de estas\(2n + 2\) variables.
Espacio de configuración\( q_i, q_j, t \)
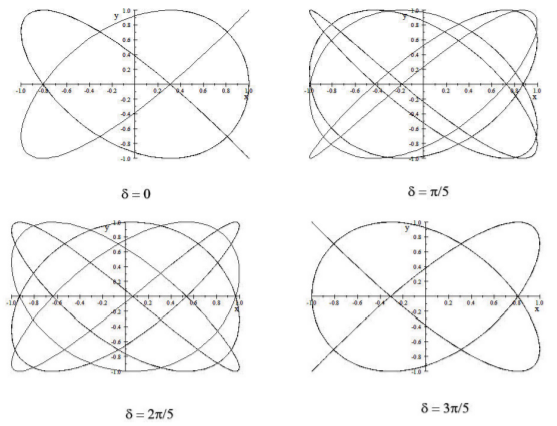
Una gráfica de espacio de configuración muestra el movimiento correlacionado de dos coordenadas espaciales\( q_i \) y\( q_j \) promediado a lo largo del tiempo. Un ejemplo es el oscilador lineal bidimensional con dos ecuaciones de movimiento y soluciones
\[ \label{eq:3.15} \begin{array}{lr} m \ddot{x} + k_x x = 0 & m\ddot{y} + k_y y = 0 \end {array}\]
\[\label{eq:3.16} \begin{array}{lr} x(t) = A \cos(\omega_x t) & y(t) = B \cos ( \omega _y t - \delta ) \end{array} \]
donde\( \omega = \sqrt{\frac{k}{m}} \). Para constantes de fuerza de restauración desiguales,\( k_x \neq k_y \) la trayectoria ejecuta complicadas figuras de Lissajous que dependen de las frecuencias angulares\( \omega_x, \omega_y \) y del factor de fase\( \delta \). Cuando la relación de las frecuencias angulares a lo largo de los dos ejes es racional,\( \frac{\omega_x}{\omega_y} \) es decir, una fracción racional, entonces la curva se repetirá a intervalos regulares como se muestra en la Figura\(\PageIndex{1}\), y esta forma depende de la diferencia de fase. De lo contrario, la trayectoria llena gradualmente todo el rectángulo.
Espacio estatal,\( ( q_i , \dot{q}_i, t ) \)
La visualización de una trayectoria se ve reforzada por la correlación de configuración\( q_i \) y su velocidad correspondiente\( \dot{q}_i \) que especifica la dirección del movimiento. La representación espacial estatal 1 es especialmente valiosa cuando se habla de la mecánica lagrangiana que se basa en la lagrangiana\( L (\mathbf{q}, {\bf \dot{q}}, t) \).
El oscilador armónico libre sin amortiguar proporciona una aplicación simple del espacio de estado. Considere una masa\(m\) unida a un resorte con constante de resorte lineal\(k\) para la cual la ecuación de movimiento es
\[ \label{3.17} -kx = m \ddot{x} = m \dot{x} \frac{d \dot{x}}{dx} \]
Por integración esto da
\[ \label{3.18} \frac{1}{2} m \dot{x}^2 + \frac{1}{2} kx^2 = E \]
El primer término en la Ecuación\ ref {3.18} es la energía cinética, el segundo término es la energía potencial, y\(E\) es la energía total que se conserva para este sistema. Esta ecuación se puede expresar en términos de las coordenadas del espacio de estado como
\[ \label{eq:3.19} \frac{\dot{x}^2}{ ( \frac{2E}{m} )} + \frac{ x^2}{ ( \frac{2E}{k} ) } = 1 \]
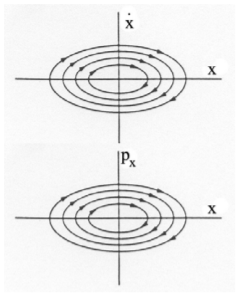
Esto corresponde a la ecuación de una elipse para una gráfica estado-espacio de\( \dot{x} \) versus\( x \) como se muestra en la Figura\(\PageIndex{2}\) - superior. Las trayectorias elípticas mostradas corresponden a contornos de energía total constante que se divide entre energía cinética y potencial. Para el eje de coordenadas mostrado, el movimiento de un punto representativo será en el sentido de las agujas del reloj ya que la energía total del oscilador se redistribuye entre la energía potencial a la cinética. El área de la elipse es proporcional a la energía total\(E\).
Espacio de fase,\( (q_i, p_i, t ) \)
El espacio de fases, que fue introducido por J.W. Gibbs para el campo de la mecánica estadística, proporciona una representación gráfica fundamental en la mecánica clásica. \( q_i p_i \)Las coordenadas del espacio de fase son las coordenadas conjugadas\( ( \mathbf{q},{\bf p} ) \) y son fundamentales para la mecánica hamiltoniana que se basa en la hamiltoniana\( H ( \mathbf{q},{\bf p}, t ) \). Para un sistema conservador, solo una curva de fase-espacio pasa a través de cualquier punto en el espacio de fase como el flujo de un fluido incompresible. Esto hace que el espacio de fase sea más útil que el espacio de estados donde muchas curvas pasan por cualquier ubicación. Lanczos [La49] definió un espacio de fase extendido utilizando espacio-tiempo relativista cuatridimensional como se discute en el capítulo\(17\).
Dado que\( p_x = m \dot{x} \) para el oscilador lineal no relativista, unidimensional, entonces la Ecuación\ ref {eq:3.19} se puede reescribir en la forma
\[ \label{eq:3.20} \frac{p_x^2}{2mE} + \frac{x^2}{ ( \frac{2E}{k} ) } = 1 \]
Esta es la ecuación de una elipse en el diagrama de espacio de fase mostrado en la Fig. \(\PageIndex{2}\)- inferior que se ve idéntico a la Fig. \(\PageIndex{2}\)- superior ya que la variable de ordenadas se multiplica por la constante\(m\). Es decir, la única diferencia es que las coordenadas de fase-espacio\( ( x, p_x ) \) reemplazan a las coordenadas estado-espacio\( ( x, \dot{x} )\). Las gráficas de espacio de estado se utilizan ampliamente en este capítulo para describir el movimiento oscilatorio. Aunque el espacio de fase es más fundamental, tanto las gráficas de espacio de estado como de espacio de fase proporcionan representaciones útiles para caracterizar y dilucidar una amplia variedad de movimiento en la mecánica clásica. La siguiente discusión sobre el péndulo simple sin amortiguar ilustra las características generales del espacio estatal.
Péndulo plano
Considera un simple péndulo plano de masa\(m\) unido a una cadena de longitud\( l\) en un campo gravitacional uniforme\(g\). Sólo hay una coordenada generalizada,\( \theta \). Dado que el momento de inercia del simple plano-péndulo es\( I = ml^2 \) entonces la energía cinética es
\[ \label{eq:3.21} T = \frac{1}{2} m l^2 \dot{\theta}^2 \]
y la energía potencial relativa al punto muerto inferior es
\[ \label{eq:3.22} U = mgl ( 1 - \cos \theta) \]
Así la energía total es igual a
\[ \label{eq:3.33} E = \frac{1}{2}ml^2 \dot{\theta}^2 + mgl (1 - \cos \theta) = \frac{p_\theta^2}{2ml^2} + mgl ( 1 - \cos \theta) \]
donde\(E\) es una constante de movimiento. Tenga en cuenta que el momento angular no\( p_\theta \) es una constante de movimiento ya que la aceleración angular depende\(\dot{p}_{\theta}\) explícitamente de\(\theta\).
Es interesante observar las soluciones para la ecuación de movimiento para un péndulo plano en un diagrama de espacio de\(\left( \theta, \dot{\theta}\right)\) estados que se muestra en la Figura\(\PageIndex{3}\). Las curvas mostradas son contornos equidistantes de energía total constante. Tenga en cuenta que las trayectorias son elipses solo en ángulos muy pequeños donde\(1− \cos \theta \approx \theta^2\), los contornos no son elípticos para oscilaciones de mayor amplitud. Cuando la energía está en el rango\(0 < E < 2\)\(mgl\) el movimiento corresponde a oscilaciones del péndulo alrededor\(\theta = 0\). El centro de la elipse está en el\((0, 0)\) que se encuentra un punto de equilibrio estable para la oscilación. Sin embargo, cuando\(|E| > 2 mgl\) hay un cambio de fase a movimiento rotacional alrededor del eje horizontal, es decir, el péndulo oscila alrededor y sobre el punto muerto superior, es decir, gira continuamente en una dirección alrededor del eje horizontal. El cambio de fase ocurre en\(E = 2\)\(mgl\). y es designado por la trayectoria separatriz.
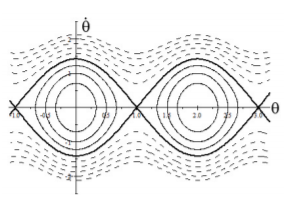
La figura\(\PageIndex{3}\) muestra dos ciclos\(\theta\) para ilustrar mejor la naturaleza cíclica del diagrama de fases. Los bucles cerrados, mostrados como líneas continuas finas, corresponden a oscilaciones de péndulo alrededor\(\theta = 0\) o\(2\pi\) para\(E < 2\)\(mgl\). Las líneas discontinuas muestran movimiento rodante para casos donde la energía total\(E > 2\)\(mgl\). La línea continua ancha es la separatriz que separa el movimiento rodante y oscilatorio. Tenga en cuenta que en la separatriz la energía cinética y\(\dot{\theta}\) son cero cuando el péndulo está en el punto muerto superior que ocurre cuando\(\theta = \pm \pi\). El punto\((\pi , 0)\) es un equilibrio inestable caracterizado por líneas de fase que son hiperbólicas a este punto de equilibrio inestable. Obsérvese que\(\theta = +\pi\) y\(−\pi\) corresponden al mismo punto físico, es decir, el diagrama de fases se presenta mejor en una representación de espacio de fase cilíndrica ya que\(\theta\) es una variable cíclica que gira alrededor del cilindro mientras que\(\dot{\theta}\) oscila por igual alrededor de cero teniendo ambos positivos y valores negativos. El diagrama estado-espacio se puede envolver alrededor de un cilindro, luego los puntos de equilibrio inestables y estables estarán en ubicaciones diametralmente opuestas en la superficie del cilindro en\(\dot \theta = 0\). Para pequeñas oscilaciones sobre el equilibrio, también llamadas libraciones, la correlación entre\(\dot{\theta}\) y\(\theta\) viene dada por los bucles cerrados en el sentido de las agujas del reloj envueltos en la superficie cilíndrica, mientras que para las energías\(|E| > 2\)\(mgl\) el positivo\(\dot{\theta}\) corresponde a rotaciones en sentido antihorario mientras que el negativo\(\dot{\theta}\) corresponde a rotaciones en sentido horario.
Se utilizarán diagramas estado-espacio para describir el movimiento oscilatorio en capítulos\(3\) y\(4\). El espacio de fase se utiliza en la mecánica estadística para manejar las ecuaciones de movimiento para conjuntos de partículas\(\sim 10^{23}\) independientes ya que el momento es más fundamental que la velocidad. En lugar de tratar de explicar por separado el movimiento de cada partícula para un conjunto, lo mejor es especificar la región del espacio de fase que contiene el conjunto. Si se conserva el número de partículas, entonces cada punto en el espacio de fase inicial debe transformarse en puntos correspondientes en el espacio de fase final. Esto se discutirá en capítulos\(8.3\) y\(15.2.7\).
1 En la literatura no se ha adoptado un nombre universal para la\((\mathbf{q}, \mathbf{\dot{q}})\) representación. Por lo tanto este libro ha adoptado el nombre de “espacio estatal”. Lanczos [La49] utiliza el término “espacio de estado” para referirse al espacio de fase extendido\( ( \mathbf{q},{\bf p}, t) \) discutido en el capítulo\(17\).