
3.5: Oscilador lineal libre amortiguado linealmente
- Page ID
- 126316
Solución general
Todas las oscilaciones armónicas simples se amortiguan hasta cierto punto debido a la disipación de energía a través de fricción, fuerzas viscosas o resistencia eléctrica, etc. El movimiento de los sistemas amortiguados no es conservador ya que la energía se disipa como calor. Como se discutió en\(2\) el capítulo, la fuerza de amortiguación puede expresarse como
\[{\bf F}_D (v) = −f(v) \hat{\mathbf{v}} \label{3.24}\]
donde la función dependiente de la velocidad\(f(v)\) puede ser complicada. Afortunadamente hay una clase muy grande de problemas en electricidad y magnetismo, mecánica clásica, física molecular, atómica y nuclear, donde la fuerza de amortiguación depende linealmente de la velocidad lo que simplifica enormemente la solución de las ecuaciones de movimiento. Por lo tanto en este capítulo se discutirá la amortiguación lineal.
Considere el oscilador armónico simple libre, es decir, asumiendo que no hay función de forzamiento oscilatorio, con un término de amortiguación lineal\({\bf F}_D(v) = −b{\bf v}\) donde el parámetro\(b\) es el factor de amortiguación. Entonces la ecuación del movimiento es
\[−kx − b\dot{x} = m\ddot{x}\label{3.25}\]
Esto se puede reescribir como
\[\ddot{x} + \ddot{x} + \Gamma \dot{x} + \omega^2_0x = 0 \label{3.26}\]
donde el parámetro de amortiguación
\[\Gamma = \frac{b}{m} \label{3.27}\]
y la frecuencia angular característica
\[\omega_0 = \sqrt{\frac{k}{m}} \label{3.28}\]
La solución general para el oscilador libre linealmente amortiguado se obtiene insertando la solución de prueba compleja\(z = z_0 e^{i\omega t}\). Entonces
\[(i\omega )^2 z_0 e^{i \omega t} + i\omega \Gamma z_0 e^{i\omega t} + \omega^2_0 z_0e^{i\omega t} = 0 \label{3.29}\]
Esto implica que
\[\omega^2 − i\omega \Gamma − \omega^2_0 = 0 \label{3.30}\]
La solución es
\[\omega_{\pm} = i \frac{\Gamma}{2} \pm \sqrt{\omega^2_0 − \left( \frac{\Gamma}{2} \right)^2} \label{3.31}\]
Las dos soluciones\(\omega_{\pm}\) son conjugados complejos y por lo tanto las soluciones del oscilador libre amortiguado son
\[z = z_1 e^{i\left(i \frac{\Gamma}{2} + \sqrt{\omega^2_0 − \left( \frac{\Gamma}{2} \right)^2}\right)t} + z_2e^{i\left(i \frac{\Gamma}{2} - \sqrt{\omega^2_0 − \left( \frac{\Gamma}{2} \right)^2}\right)t} \label{3.32}\]
Esto se puede escribir como
\[z = e^{−( \frac{\Gamma}{2} )t} \left[ z_1 e^{i\omega_1 t} + z_2 e^{-i\omega_1 t}\right] \label{3.33}\]
donde
\[\omega_1 \equiv \sqrt{\omega^2_o − \left( \frac{\Gamma}{2} \right)^2 } \label{3.34}\]
Movimiento subamortiguado\(\omega^2_1 \equiv \omega^2_o − \left(\frac{\Gamma}{2} \right)^2 > 0\)
Cuando\(\omega^2_1 > 0\) entonces la raíz cuadrada es real para que la solución se pueda escribir tomando la parte real de la\(z\) cual da esa Ecuación\ ref {3.33} es igual
\[x(t) = Ae^{−( \frac{\Gamma}{ 2} )t} \cos (\omega_1 t − \beta ) \label{3.35}\]
Donde\(A\) y\(\beta\) son constantes ajustables que se ajustan a las condiciones iniciales. Por lo tanto, la velocidad viene dada por
\[\dot{x}(t) = −Ae^{-\frac{\Gamma}{ 2}t} \left[ \omega_1 \sin (\omega_1 t − \beta ) + \frac{\Gamma}{ 2} \cos (\omega_1 t − \beta ) \right] \label{3.36}\]
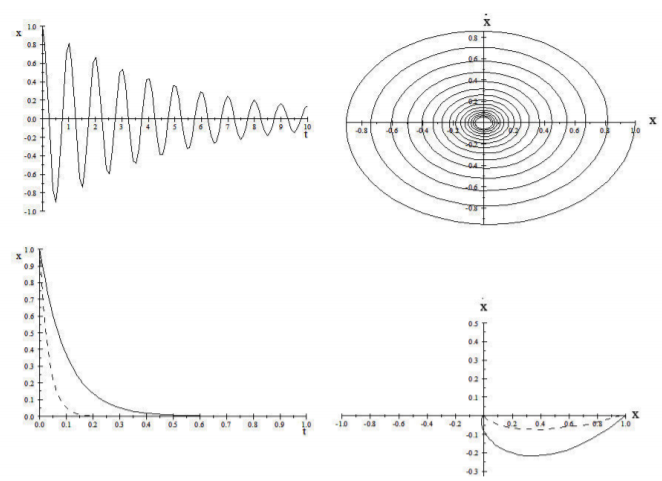
Esta es la oscilación sinusoidal amortiguada ilustrada en la Figura\(\PageIndex{1}\) - superior. La solución tiene las siguientes características:
- La amplitud de oscilación disminuye exponencialmente con una constante de tiempo\(\tau_D = \frac{2}{\Gamma}\).
- Hay una pequeña reducción en la frecuencia de la oscilación debido a la amortiguación que conduce a\(\omega_1 = \sqrt{\omega^2_o − \left(\frac{\Gamma}{ 2}\right)^2}\)
Maleta sobreamortiguada\(\omega^2_1 \equiv \omega^2_o − \left( \frac{\Gamma}{2}\right)^2 < 0\)
En este caso la raíz cuadrada de\(\omega^2_1\) es imaginaria y se puede expresar como\(\omega^{\prime}_1 = i\sqrt{\left(\frac{\Gamma}{2}\right)^2 - \omega^2_o}\). Por lo tanto, la solución se obtiene de forma más natural mediante el uso de una solución de ensayo real\(z =z+0 e^{\omega t}\) en la Ecuación\ ref {3.33} que conduce a dos raíces
\[\omega_{\pm} = − \left[ −\frac{\Gamma}{2} \pm \sqrt{ \left( \frac{\Gamma}{2}\right)^2 − \omega^2_o} \right] \nonumber\]
Así, el decaimiento amortiguado exponencialmente tiene dos constantes de tiempo\(\omega_+\) y\(\omega_−\).
\[x(t) = {A_1e^{-\omega_+ t}} + A_2e^{−\omega_− t}] \label{3.37}\]
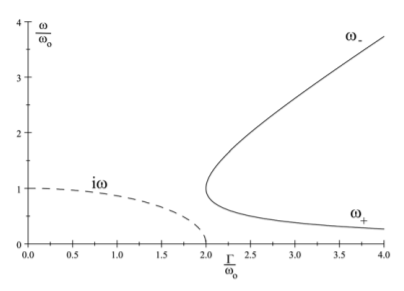
La constante de tiempo\(\frac{1}{\omega_−} < \frac{1}{\omega_+}\) así el primer término\(A_1e^{-\omega_+ t}\) en el paréntesis decae en un tiempo más corto que el segundo plazo\(A_2e^{-\omega_- t}\). Como se ilustra en\(\PageIndex{2}\) la Figura, la tasa de decaimiento, que es imaginaria cuando está subamortiguada, es decir, se\(\frac{\Gamma}{2} < \omega_o\) bifurca en dos valores reales\(\omega_{\pm}\) para sobreamortiguado, es decir\(\frac{\Gamma}{2} >\omega_o\). En grandes momentos el término dominante cuando está sobreamortiguado es para el\(\omega_+\) cual tiene la menor tasa de decaimiento, es decir, la constante de decaimiento más larga\(\tau_+ = \frac{1}{\omega_+}\). No hay movimiento oscilatorio para el caso sobreamortiguado, se mueve lentamente monótonamente a cero como se muestra en la fig 3.5 inferior. La amplitud decae con una constante de tiempo que es más larga que\(\frac{2}{\Gamma}\).
Amortiguado críticamente\(\omega^2_1 \equiv \omega^2_o − \left( \frac{\Gamma}{2}\right)^2 = 0\)
Este es el caso limitante donde\(\frac{\Gamma}{2}= \omega_o\) Para este caso la solución es de la forma
\[x(t) = (A +Bt) e^{-( \frac{\Gamma}{2})t} \label{3.38}\]
Este movimiento también es no sinusoidal y evoluciona monótonamente a cero. Como se muestra en\(\PageIndex{1}\) la Figura, la solución amortiguada críticamente va a cero con la constante de tiempo más corta, es decir, la más grande\(\omega\). Así, los medidores eléctricos analógicos se construyen casi críticamente amortiguados para que la aguja se mueva al nuevo valor de equilibrio en el menor tiempo sin oscilación.
Es útil representar gráficamente el movimiento del oscilador lineal amortiguado en un diagrama de espacio de estado o\((\dot{x}, x)\) diagrama de espacio de fase como se discute en el capítulo\(3.4\).\((p_x, x)\) Los gráficos de espacio de estado para las soluciones no amortiguadas, sobreamortiguadas y amortiguadas críticamente del oscilador armónico amortiguado se muestran en la Figura\(\PageIndex{1}\). Para el movimiento subamortiguado, el diagrama de espacio de estado gira hacia adentro hasta el origen en contraste con el movimiento crítico o sobreamortiguado donde los diagramas de estado y espacio de fase se mueven monótonamente a cero.
Disipación de energía
La energía instantánea es la suma de las energías cinéticas y potenciales instantáneas
\[E = \frac{1}{2} m \dot{x}^2 + \frac{1}{2} kx^2 \label{3.39}\]
donde\(x\) y\(\dot{x}\) están dadas por la solución de la ecuación de movimiento. Considere la energía total del sistema de amortiguación insuficiente
\[E = \frac{1}{2} m \dot{x}^2 + \frac{1}{2} m\omega^2_0x^2 \label{3.40}\]
donde\(k = m\omega^2_0\). El promedio de energía total se da por sustitución\(x\)\(\dot{x}\) y toma de la media a lo largo de un ciclo. Desde
\[x(t) = Ae^{−( \frac{\Gamma}{2})t} \cos (\omega_1 t − \beta ) \label{3.41}\]
Entonces la velocidad viene dada por
\[\dot{x}(t) = −Ae^{− \frac{\Gamma}{2} t} \left[ \omega_1 \sin (\omega_1t − \beta ) + \frac{\Gamma}{2} \cos (\omega_1 t − \beta ) \right] \label{3.42}\]
Insertar ecuaciones\ ref {3.41} y\ ref {3.42} en\ ref {3.40} da una pequeña oscilación de amplitud alrededor de un decaimiento exponencial para la energía\(E\). Promediando a lo largo de un ciclo y utilizando el hecho de que\(\langle \sin \theta \cos \theta \rangle = 0\), y\(\left\langle [\sin \theta ]^2 \right\rangle = \left\langle [ \cos \theta ]^2 \right\rangle = \frac{1}{2}\), da la energía total promediada en el tiempo como
\[\langle E \rangle = e^{-\Gamma t} \left( \frac{1}{4} mA^2 \omega^2_1 + \frac{1}{4} m A^2 \left( \frac{\Gamma}{2} \right)^2 + \frac{1}{4} mA^2 \omega^2_0 \right) \label{3.43}\]
que se puede escribir como
\[\langle E \rangle = E_0 e^{−\Gamma t} \label{3.44}\]
Tenga en cuenta que la energía del oscilador libre amortiguado linealmente se desintegra exponencialmente con una constante de tiempo\(\tau = \frac{1}{\Gamma}\). Es decir, la intensidad tiene una constante de tiempo que es la mitad de la constante de tiempo para la disminución de la amplitud de la respuesta transitoria. Obsérvese que las energías cinéticas y potenciales promedio son idénticas, como lo implica el teorema del Virial, y ambas se desintegran con la misma constante de tiempo. Esta relación entre la vida media\(\tau\) de decaimiento del oscilador armónico amortiguado y el término de ancho de amortiguación\(\Gamma\) ocurre frecuentemente en la física.
La amortiguación de un oscilador generalmente se caracteriza por un solo parámetro\(Q\) llamado Factor de Calidad donde
\[Q \equiv \frac{\text{Energy stored in the oscillator}}{\text{Energy dissipated per radian}} \label{3.45}\]
La pérdida de energía por radián viene dada por
\[\Delta E = \frac{dE}{dt} \frac{1}{\omega_1} = \frac{E \Gamma}{\omega_1} = \frac{E\Gamma}{\sqrt{\omega^2_o - \left( \frac{\Gamma}{2} \right)^2 } } \label{3.46}\]
donde el numerador\(\omega_1 = \sqrt{\omega^2_o − \left( \frac{\Gamma}{2} \right)^2}\) es la frecuencia del oscilador lineal amortiguado libre.
Por lo tanto, el factor Calidad\(Q\) es igual
\[Q = \frac{E}{\Delta E} = \frac{\omega_1}{\Gamma} \label{3.47}\]
Cuanto mayor sea el\(Q\) factor, menos amortiguado es el sistema, y mayor es el número de ciclos de la oscilación en el tren de ondas amortiguado. El capítulo\(3.11.3\) muestra que cuanto más largo es el tren de olas, es decir, mayor es el\(Q\) factor, más estrecha es la distribución de frecuencias alrededor del valor central. El efecto Mössbauer en física nuclear proporciona un tren de ondas notablemente largas que se puede utilizar para realizar mediciones de alta precisión. La alta\(Q\) precisión del interferómetro láser LIGO se utilizó en la reciente búsqueda exitosa de ondas gravitacionales.
| Sistema Oscilante | Factores Q típicos |
|---|---|
| Tierra, para ola sísmica | 250-1400 |
| Cuerda para piano | 3000 |
| Cristal en reloj digital | \(10^4\) |
| Cavidad de microondas | \(10^4\) |
| Átomo excitado | \(10^7\) |
| Estrella de neutrones | \(10^{12}\) |
| Láser LIGO | \(10^{13}\) |
| Efecto Mössbauer en núcleo | \(10^{14}\) |