3.6: Oscilador lineal, accionado sinusoidalmente, amortiguado linealmente
- Page ID
- 126307
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
El oscilador lineal amortiguado linealmente, impulsado por una fuerza impulsora armónica, es de considerable importancia para todas las ramas de la ciencia y la ingeniería. La ecuación del movimiento se puede escribir como
\[\ddot{x} + \Gamma \dot{x} + w^2_0 x = \frac{F (t)}{m} \label{3.48}\]
donde\(F(t)\) esta la fuerza impulsora. Por simplicidad matemática, la fuerza impulsora se elige para ser una fuerza armónica sinusoidal. La solución de esta ecuación diferencial de segundo orden comprende dos componentes, la solución complementaria (respuesta transitoria) y la solución particular (respuesta de estado estacionario).
Respuesta transitoria de un oscilador accionado
La respuesta transitoria de un oscilador accionado viene dada por la solución complementaria de la ecuación diferencial de segundo orden anterior
\[\ddot{x} + \Gamma \dot{x} + \omega^{2}_0 x = 0 \label{3.49}\]
que es idéntica a la solución del oscilador armónico libre amortiguado linealmente. Como se discutió en sección\(3.5\) la solución del oscilador libre linealmente amortiguado viene dada por la parte real de la variable compleja\(z\) donde
\[z = e^{− \frac{\Gamma}{2} t} [z_1 e^{i \omega_1 t} + z_2 e^{-i \omega_1 t} ] \label{3.50}\]
y
\[\omega_1 \equiv \sqrt{\omega^2_o − \left( \frac{\Gamma}{2} \right)^2 } \label{3.51}\]
Movimiento subamortiguado\(\omega^2_1 \equiv \omega^2_o − \frac{\Gamma}{2}^2 > 0\):
Cuando\(\omega^2_1 > 0\), entonces la raíz cuadrada es real por lo que la solución transitoria se puede escribir tomando la parte real de la\(z\) cual da
\[x(t)_T = \frac{F_0}{m} e^{-\frac{\Gamma}{2} t} \cos (\omega_1 t) \label{3.52}\]
La solución tiene las siguientes características:
a) La amplitud de la solución transitoria disminuye exponencialmente con una constante de tiempo\(\tau_D = \frac{2}{\Gamma}\) mientras que la energía disminuye con una constante de tiempo de\(\frac{1}{\Gamma}\).
b) Hay un pequeño desplazamiento de frecuencia descendente en eso\(\omega_1 = \sqrt{\omega^2_o − ( \frac{\Gamma}{2})^2}\).
Caso sobreamortiguado\(\omega^2_1 \equiv \omega^2_o − (\frac{\Gamma}{2})^2 < 0\):
En este caso la raíz cuadrada es imaginaria, que se puede expresar como\(\omega^{\prime}_1 \equiv \sqrt{(\frac{\Gamma}{2})^2 − \omega^2_o}\) que es real y la solución es solo una exponencialmente amortiguada
\[x(t)_T = \frac{F_0}{m} e^{-\frac{\Gamma}{2} t} \left[e^{\omega^{\prime}_1 t} + e^{-\omega^{\prime}_1 t} \right]\label{3.53}\]
No hay movimiento oscilatorio para el caso sobreamortiguado, lentamente se mueve monótonamente a cero. La energía total se descompone con dos constantes de tiempo mayores que\(\frac{1}{\Gamma}\).
Amortiguado críticamente\(\omega^2_1 \equiv \omega^2_o − (\frac{\Gamma}{2})^2 = 0\):
Para este caso, como se mencionó para el oscilador libre amortiguado, la solución es de la forma
\[x(t)_T = (A + Bt) e^{− \frac{\Gamma}{2} t} \label{3.54}\]
El sistema amortiguado críticamente se desintegra de la manera más rápida.
Respuesta de estado estacionario de un oscilador accionado
La solución particular de la ecuación diferencial da la importante respuesta de estado estacionario,\(x(t)_S\) a la función de forzamiento. Considera que el término forzoso es una oscilación sinusoidal de frecuencia única.
\[F(t) = F_0 \cos (\omega t) \label{3.55}\]
Así, la solución particular es la parte real de la variable compleja\(z\) que es una solución de
\[\ddot{z} + \Gamma \dot{z} + \omega^2_0 z = \frac{F_0}{m} e^{i\omega t} \label{3.56}\]
Una solución de prueba es
\[z = z_0 e^{i \omega t} \label{3.57}\]
Esto lleva a la relación
\[−\omega^2 z_0 + i \omega \Gamma z_0 + \omega^2_0 z_0 = \frac{F_0}{m} \label{3.58}\]
Multiplicar el numerador y denominador por el factor\((\omega^2_0 − \omega^2) − i\Gamma \omega\) da
\[z_0 = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2) + i\Gamma \omega} = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} [( \omega^2_0 − \omega^2) − i\Gamma \omega ] \label{3.59}\]
La solución de estado estacionario\(x(t)_S\) así viene dada por la parte real de\(z\), es decir
\[x(t)_S = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} [( \omega^2_0 − \omega^2) \cos \omega t + \Gamma \omega \sin \omega t] \label{3.60}\]
Esto puede expresarse en términos de una fase\(\delta\) definida como
\[\tan \delta \equiv \left( \frac{\Gamma \omega}{ \omega^2_0 − \omega^2}\right) \label{3.61}\]
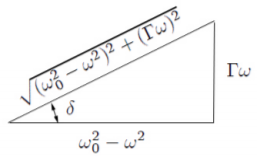
Como se muestra en\(\PageIndex{1}\) la Figura la hipotenusa del triángulo es igual\(\sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}\). Por lo tanto
\[\cos \delta = \frac{\omega^2_0 − \omega^2}{\sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}} \label{3.62}\]
y
\[\sin \delta = \frac{\Gamma \omega}{ \sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}} \label{3.63}\]
La fase\(\delta\) representa la diferencia de fase entre la fuerza motriz y el movimiento resultante. Para un fijo\(\omega_0\) la fase\(\delta = 0\) cuando\(\omega = 0\), y aumenta a\(\delta = \frac{\pi}{2}\) cuando\(\omega = \omega_0\). Para\(\omega > \omega_0\) la fase\(\delta \rightarrow \pi\) como\(\omega \rightarrow \infty\).
La solución de estado estacionario se puede volver a expresar en términos del desplazamiento de fase\(\delta\) como
\[x(t)_S = \frac{\frac{F_0}{m}}{\sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}} [\cos \delta \cos \omega t + \sin \delta \sin \omega t] \\ = \frac{\frac{F_0}{m}}{\sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}} \cos (\omega t − \delta) \label{3.64}\]
Solución completa del oscilador accionado
En resumen, la solución total del oscilador armónico linealmente amortiguado forzado sinusoidalmente es la suma de las soluciones transitorias y de estado estacionario de las ecuaciones de movimiento.
\[x(t)_{Total} = x(t)_T + x(t)_S \label{3.65}\]
Esto para el caso subamortiguado, la solución transitoria es la solución complementaria
\[x(t)_T = \frac{F_0}{m} e^{-\frac{\Gamma}{2} t} \cos (\omega_1 t − \beta) \label{3.66}\]
donde\(\omega_1 = \sqrt{\omega^2_o − (\frac{\Gamma}{2})^2}\). La solución de estado estacionario viene dada por la solución particular
\[x(t)_S = \frac{\frac{F_0}{m}}{\sqrt{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2}} \cos (\omega t − \delta) \label{3.67}\]
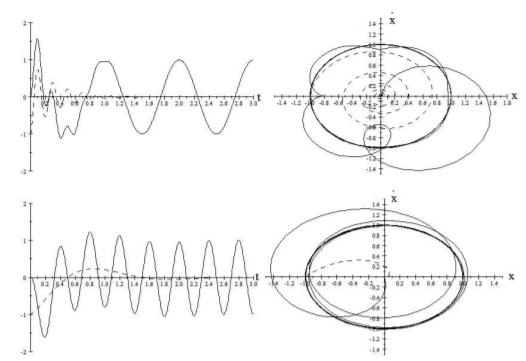
Tenga en cuenta que la frecuencia de la solución transitoria es la\(\omega_1\) que en general difiere de la frecuencia de conducción\(\omega\). El desplazamiento de fase\(\beta − \delta\) para el componente transitorio es establecido por las condiciones iniciales. La respuesta transitoria conduce a un movimiento más complicado inmediatamente después de encender la función de conducción. La figura\(\PageIndex{2}\) ilustra el diagrama de dependencia del tiempo de amplitud y espacio de estado para el componente transitorio, y la respuesta total, cuando la frecuencia de accionamiento es\(\omega = \frac{\omega_1}{5}\) o\(\omega = 5\omega_1\). Tenga en cuenta que la modulación de la respuesta de estado estacionario por la respuesta transitoria no es importante una vez que la respuesta transitoria se ha amortiguado, lo que lleva a una trayectoria espacial de estado elíptico constante. Para los casos en los que las condiciones iniciales son\(x = \dot{x} = 0\) entonces la solución transitoria tiene una diferencia de fase relativa\(\beta −\delta = \pi\) radianes en\(t = 0\) y amplitudes relativas tales que las soluciones transitorias y de estado estacionario cancelan en\(t = 0\).
Los sonidos característicos de diferentes tipos de instrumentos musicales dependen en gran medida de la mezcla de soluciones transitorias más el número y mezcla de modos activos oscilatorios. Los instrumentos de percusión, como el piano, tienen un gran componente transitorio. La mezcla de soluciones transitorias y de estado estacionario para oscilaciones forzadas ocurre frecuentemente en estudios de redes RLC en análisis de circuitos eléctricos.
Resonancia
La discusión hasta ahora ha discutido el papel de las soluciones transitorias y de estado estacionario del oscilador armónico amortiguado impulsado que ocurre con frecuencia es la ciencia, y la ingeniería. Otro aspecto importante es la resonancia que ocurre cuando la frecuencia de conducción\(\omega\) se acerca a la frecuencia natural\(\omega_1\) del sistema amortiguado. Considera el caso en el que el tiempo es suficiente para que la solución transitoria haya decaído a cero.

La figura\(\PageIndex{3}\) muestra la amplitud y la fase para la respuesta de estado estacionario a medida que\(\omega\) pasa por una resonancia a medida que se cambia la frecuencia de accionamiento. La solución de estados estables del oscilador accionado sigue la fuerza impulsora cuando\(\omega << \omega_0\) la diferencia de fase es cero y la amplitud es justa\(\frac{F_0}{k}\). La respuesta del sistema alcanza su punto máximo en la resonancia, mientras que para\(\omega >> \omega_0\) el sistema armónico es incapaz de seguir la fuerza impulsora que oscila más rápidamente y así la fase de la oscilación inducida está desfasada con la fuerza impulsora y la amplitud de la oscilación tiende a cero.
Tenga en cuenta que la frecuencia de resonancia para un oscilador amortiguado accionado, difiere de la del oscilador amortiguado no accionado, y difiere de la del oscilador no amortiguado. La frecuencia natural para un oscilador armónico no amortiguado viene dada por
\[\omega^2_0 = \frac{k}{m} \label{3.68}\]
La solución transitoria es la misma que las oscilaciones libres amortiguadas de un oscilador amortiguado y tiene una frecuencia del sistema\(\omega_1\) dada por
\[\omega^2_1 = \omega^2_0 − \left(\frac{\Gamma}{2}\right)^2 \label{3.69}\]
Es decir, el amortiguamiento reduce ligeramente la frecuencia.
Para el oscilador accionado el valor máximo de la respuesta de amplitud de estado estacionario se obtiene tomando el máximo de la función\(x(t)_s\), es decir cuando\(\frac{dx_S}{d\omega} = 0\). Esto ocurre en la frecuencia angular de resonancia\(\omega_R\) donde
\[\omega^2_R = \omega^2_0 − 2 \left(\frac{\Gamma}{2}\right)^2 \label{3.70}\]
No se produce resonancia si\(\omega^2_0−2 (\frac{\Gamma}{2})^2 < 0\) desde entonces\(\omega_R\) es imaginaria y la amplitud disminuye monótonamente con el aumento\(\omega\). Tenga en cuenta que las tres frecuencias anteriores son idénticas si\(\Gamma = 0\) pero difieren cuando\(\Gamma > 0\) con\(\omega_R < \omega_1 < \omega_0\).
Para el oscilador accionado se acostumbra definir el factor de calidad\(Q\) como
\[Q \equiv \frac{ \omega_R}{\Gamma} \label{3.71}\]
Cuando\(Q >> 1\) entonces uno tiene un pico estrecho de resonancia alta. A medida que aumenta la amortiguación, el factor de calidad disminuye conduciendo a un pico más amplio y más bajo. La resonancia desaparece cuando\(Q < 1\).
Absorción de energía
La discusión de la energía almacenada en sistemas resonantes se describe mejor usando la solución de estado estacionario que es dominante después de que la solución transitoria ha decaído a cero. Entonces
\[x(t)_S = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} [(\omega^2_0 − \omega^2) \cos \omega t + \Gamma \omega \sin \omega t] \label{3.72}\]
Esto se puede reescribir como
\[x(t)_S = A_{el} \cos \omega t + A_{abs} \sin \omega t \label{3.73}\]
donde la amplitud elástica
\[A_{el} = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} (\omega^2_0 − \omega^2) \label{3.74}\]
mientras que la amplitud de absorción
\[A_{abs} = \frac{\frac{F_0}{m}}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} \Gamma \omega \label{3.75}\]
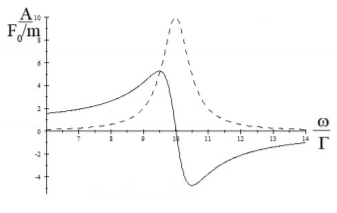
La figura\(\PageIndex{4}\) muestra el comportamiento de las amplitudes absorbentes y elásticas en función de la frecuencia angular\(\omega\). La amplitud de absorción es significativa solo cerca de la resonancia, mientras que la amplitud elástica va a cero en la resonancia. Tenga en cuenta que el ancho completo a la mitad del máximo del pico de amplitud de absorción es igual\(\Gamma\).
El trabajo realizado por la fuerza\(F_0 \cos \omega t\) sobre el oscilador es
\[W = \int F dx = \int F \dot{x} dt \label{3.76}\]
Así el poder absorbido\(P(t)\) viene dado por
\[P(t) = \frac{dW}{dt} = F \dot{x} \label{3.77}\]
La respuesta de estado estacionario da una velocidad
\[\dot{x}(t)_S = −\omega A_{el} \sin \omega t + \omega A_{abs} \cos \omega t \label{3.78}\]
Por lo tanto, la entrada de potencia instantánea en estado estacionario es
\[P(t) = F_0 \cos \omega t [−\omega A_{el} \sin \omega t + \omega A_{abs} \cos \omega t] \label{3.79}\]
El término absortivo absorbe constantemente energía mientras que el término elástico oscila a medida que la energía se absorbe o emite alternativamente. El promedio de tiempo a lo largo de un ciclo viene dado por
\[\langle P \rangle = F_0 \left[ −\omega A_{el} \langle \cos \omega t \sin \omega t \rangle + \omega A_{abs} \left\langle (\cos \omega t)^2 \right\rangle \right] \label{3.80}\]
donde\(\langle \cos \omega t \sin \omega t \rangle\) y\(\langle \cos \omega t^2 \rangle\) son el promedio de tiempo a lo largo de un ciclo. Los promedios de tiempo a lo largo de un ciclo completo para el primer término en el paréntesis son
\[−\omega A_{el} \langle \cos \omega t \sin \omega t \rangle = 0 \label{3.81}\]
mientras que para el segundo mandato
\[\langle \cos \omega t^2 \rangle = \frac{1}{T} \int^{t_0 + T}_{t_o} \cos \omega t^2 dt = \frac{1}{2} \label{3.82}\]
Por lo tanto, la entrada de potencia promedio en el tiempo viene dada por solo el término de absorción
\[\langle P \rangle = \frac{1}{2} F_0\omega A_{abs} = \frac{F^2_0}{2m} \frac{\Gamma \omega^2}{(\omega^2_0 − \omega^2)^2 + (\Gamma \omega )^2} \label{3.83}\]
Esta forma de la curva de potencia es una forma clásica de Lorentzian. Obsérvese que el máximo de la energía cinética promedio se produce en la\(\omega_{KE} = \omega_0\) que es diferente del pico de la amplitud que se produce en\(\omega^2_1 = \omega^2_0 − \left( \frac{\Gamma}{2}\right)^2\). La energía potencial es proporcional a la amplitud al cuadrado, es decir,\(x^2_S\) que ocurre a la misma frecuencia angular que la amplitud, es decir,\(\omega^2_{PE} = \omega^2_R = \omega^2_0 − 2 \left(\frac{\Gamma}{2}\right)^2\). Las energías cinética y potencial resuenan a diferentes frecuencias angulares como resultado de que el oscilador amortiguado accionado no es conservador porque la energía se intercambia continuamente entre el oscilador y el sistema de fuerza motriz además de la disipación de energía debida a la amortiguación.
Cuando\(\omega \sim \omega_0 >> \Gamma\), entonces la ecuación de potencia simplifica desde
\[(\omega^2_0 − \omega^2) = (\omega_0 + \omega ) (\omega_0 − \omega ) \approx 2\omega_0 (\omega_0 − \omega ) \label{3.84}\]
Por lo tanto
\[\langle P \rangle \simeq \frac{F^2_0}{8m} \frac{\Gamma}{(\omega_0 − \omega )^2 + \left(\frac{\Gamma}{2}\right)^2} \label{3.85}\]
A esto se le llama la forma lorentziana o Breit-Wigner. Los puntos de media potencia están a una diferencia de frecuencia de la resonancia de\(\pm \Delta \omega\) donde
\[\Delta \omega = |\omega_0 − \omega | = \pm \frac{\Gamma}{2} \label{3.86}\]
Así, el ancho completo a la mitad máxima de la curva lorentziana es igual\(\Gamma\). Tenga en cuenta que el lorentziano tiene un pico más estrecho pero una cola mucho más ancha en relación con una forma gaussiana. En el pico de la potencia absorbida, la amplitud de absorción se puede escribir como
\[A_{abs} (\omega = \omega_0) = \frac{F_0}{m} \frac{Q}{\omega^2_0} \label{3.87}\]
Es decir, la amplitud máxima aumenta con el aumento en\(Q\). Esto explica la escena clásica de la comedia donde la soprano rompe el cristal porque el cristal de mayor calidad tiene un alto\(Q\) lo que lleva a una oscilación de gran amplitud cuando canta en resonancia.
Se demostró que la vida media\(\tau\) del oscilador armónico libre amortiguado linealmente, es decir, el tiempo de decaimiento de la energía de las oscilaciones libres se\(1/e\) relacionó con el coeficiente de amortiguación\(\Gamma\) por
\[\tau = \frac{1}{\Gamma} \label{3.88}\]
Por lo tanto, tenemos el principio de incertidumbre clásico para el oscilador armónico linealmente amortiguado de que el ancho completo medido a la mitad del máximo de la curva de resonancia de energía para oscilación forzada y la vida media para decaimiento de la energía de un oscilador libre amortiguado linealmente están relacionados por
\[\tau\Gamma = 1 \label{3.89}\]
Esta relación es correcta solo para un sistema armónico linealmente amortiguado. Existen relaciones comparables entre la vida útil y el ancho de amortiguación para diferentes formas de amortiguación.
Se puede demostrar el ancho de línea anterior y la relación de tiempo de decaimiento usando una cuerda de guitarra eléctrica accionada acústicamente. También ocurre por el ancho de la radiación electromagnética y la vida útil para la descomposición de la desintegración electromagnética atómica o nuclear. Este principio clásico de incertidumbre es exactamente el mismo que el que se encuentra en la física cuántica debido a la dualidad onda-partícula. En la física nuclear es difícil medir la vida útil de los estados cuando\(\tau < 10^{-13} s\). Para tiempos de vida más cortos, el valor de se\(\Gamma\) puede determinar a partir de la forma de la curva de resonancia que se puede medir directamente cuando la amortiguación es grande.
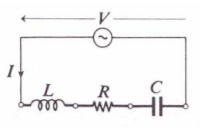
Ejemplo\(\PageIndex{1}\): Harmonically-driven series RLC circuit
El circuito RLC en serie resonante accionado armónicamente se encuentra frecuentemente en circuitos de CA. Las reglas de Kirchhoff aplicadas al circuito RLC en serie conducen a la ecuación diferencial
\[L\ddot{q} + R\dot{q} + \frac{q}{C} = V_0 \sin \omega t \nonumber\]
donde\(q\) está la carga,\(L\) es la inductancia,\(C\) es la capacitancia,\(R\) es la resistencia, y el voltaje aplicado a través del circuito es\(V (\omega ) = V_0 \sin \omega t\). La linealidad de la red permite el uso del enfoque fasor que asume que la corriente\(I = I_0e^{i \omega t}\), el voltaje\(V = V_0 e^{i(\omega t+\delta)}\) y la impedancia son un número complejo\(Z = \frac{V_0}{I_0} e^{i \delta}\) donde\(\delta\) está la diferencia de fase entre el voltaje y la corriente. Para este circuito la impedancia viene dada por
\[Z = R + i\left( \omega L − \frac{1}{\omega C} \right) \nonumber\]
Debido a las fases involucradas en este circuito RLC, en resonancia, el voltaje máximo a través de la resistencia ocurre a una frecuencia de\(\omega_R = \omega_0\), a través del condensador el voltaje máximo ocurre a una frecuencia\(\omega^2_C = \omega^2_0 − \frac{R^2}{2L^2}\), y a través del inductor\(L\) el voltaje máximo ocurre a una frecuencia\(\omega^2_L = \frac{\omega^2_0}{1− \frac{R^2}{2L^2}}\), donde\(\omega^2_0 = \frac{1}{LC}\) es la frecuencia angular de resonancia cuando\(R = 0\). Así estas frecuencias de resonancia difieren cuando\(R > 0\).