
4.4: Límite de ciclos
- Page ID
- 126746
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Teorema de Poincaré-Bendixson
Ecuaciones diferenciales acopladas de primer orden en dos dimensiones de la forma
\[\dot{x} = f(x,y)\hspace{0.55in}\dot{y} = g(x,y) \label{4.10}\]
ocurren con frecuencia en la física. Los caminos estado-espacio no se cruzan para tales sistemas autónomos bidimensionales, donde un sistema autónomo no depende explícitamente del tiempo.
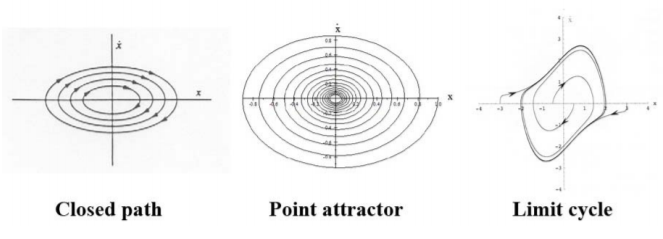
El teorema de Poincaré-Bendixson afirma que, estado-espacio y fase-espacio, pueden tener tres caminos posibles:
- trayectorias cerradas, como las trayectorias elípticas para el oscilador armónico no amortiguado,
- terminar en un punto de equilibrio como\(t\rightarrow \infty\), como el atractor puntual para un oscilador armónico amortiguado,
- tienden a un ciclo límite como\(t\rightarrow \infty\).
El ciclo límite es inusual ya que el movimiento periódico tiende asintóticamente al atractor de ciclo límite independientemente de si los valores iniciales están dentro o fuera del ciclo límite. El equilibrio de las fuerzas disipativas y las fuerzas impulsoras a menudo conduce a atractores de ciclo limitado, especialmente en aplicaciones biológicas. La identificación de atractores de ciclo límite, así como las trayectorias del movimiento hacia estos atractores de ciclo límite, es más complicada que para los atractores puntuales.
oscilador armónico amortiguado van der Pol
El oscilador armónico amortiguado van der Pol ilustra una ecuación no lineal que conduce a un atractor de ciclo límite bien estudiado que tiene importantes aplicaciones en diversos campos. El oscilador van der Pol tiene una ecuación de movimiento dada por
\[\frac{d^{2}x}{dt^{2}}+\mu \left( x^{2}-1\right) \frac{dx}{dt}+\omega _{0}^{2}x = 0 \label{4.11}\]
El término de\(\mu \left( x^{2}-1\right) \frac{dx}{dt}\) amortiguación no lineal es inusual en que el signo cambia al\(x = 1\) conducir a amortiguación positiva para\( x>1\) y amortiguación negativa para\(x<1.\) Para simplificar la ecuación\ ref {4.11}, supongamos que el término\(\omega _{0}^{2}x = x,\) que es,\(\omega _{0}^{2} = 1\).
Esta ecuación fue estudiada extensamente durante los años 1920 y 1930 por el ingeniero holandés Balthazar van der Pol, para describir circuitos electrónicos que incorporan retroalimentación. La forma de la solución se puede simplificar definiendo una variable\(y\equiv \frac{dx}{dt}.\) Entonces la Ecuación de segundo orden\ ref {4.11} se puede expresar como dos ecuaciones acopladas de primer orden.
\[y \equiv \frac{dx}{dt} \label{4.12}\]
\[ \frac{dy}{dt} = -x-\mu \left( x^{2}-1\right) y \label{4.13}\]
Es ventajoso transformar el espacio de\(\left( \dot{x},x\right)\) estado en coordenadas polares configurando
\[\begin{align} x & = &r\cos \theta \label{4.14}\\ y & = &r\sin \theta \nonumber \end{align}\]
y utilizando el hecho de que\(\ r^{2} = x^{2}+y^{2}\). Por lo tanto
\[r\frac{dr}{dt} = x\frac{dx}{dt}+y\frac{dy}{dt}\label{4.15}\]
Similarmente para la coordenada angular
\[\frac{dx}{dt} = \frac{dr}{dt}\cos \theta -r\frac{d\theta }{dt}\sin \theta \label{4.16}\]
\[\frac{dy}{dt} = \frac{dr}{dt}\sin \theta +r\frac{d\theta }{dt}\cos \theta \label{4.17}\]
Multiplicar la ecuación\ ref {4.16} por\(y\) y\ ref {4.17} por\(x\) y restar da
\[r^{2}\frac{d\theta }{dt} = x\frac{dy}{dt}-y\frac{dx}{dt}\label{4.18}\]
Las ecuaciones\ ref {4.15} y\ ref {4.18} permiten que las ecuaciones de movimiento van der Pol se escriban en coordenadas polares
\[\frac{dr}{dt} = -\mu \left( r^{2}\cos ^{2}\theta -1\right) r\sin ^{2}\theta \label{4.19}\]
\[\frac{d\theta }{dt} = -1-\mu \left( r^{2}\cos ^{2}\theta -1\right) \sin \theta \cos \theta \label{4.20}\]Los términos no lineales en el lado derecho de las ecuaciones\ ref {4.19} -\ ref {4.20} tienen una forma complicada.
Débil no linealidad:\(\mu <<1\)
En el límite que\(\mu \rightarrow 0\), las ecuaciones\ ref {4.19},\ ref {4.20} corresponden a una trayectoria circular estado-espacio similar al oscilador armónico. Es decir, la solución es de la forma
\[x\left( t\right) = \rho \sin \left( t-t_{0}\right)\label{4.21}\]
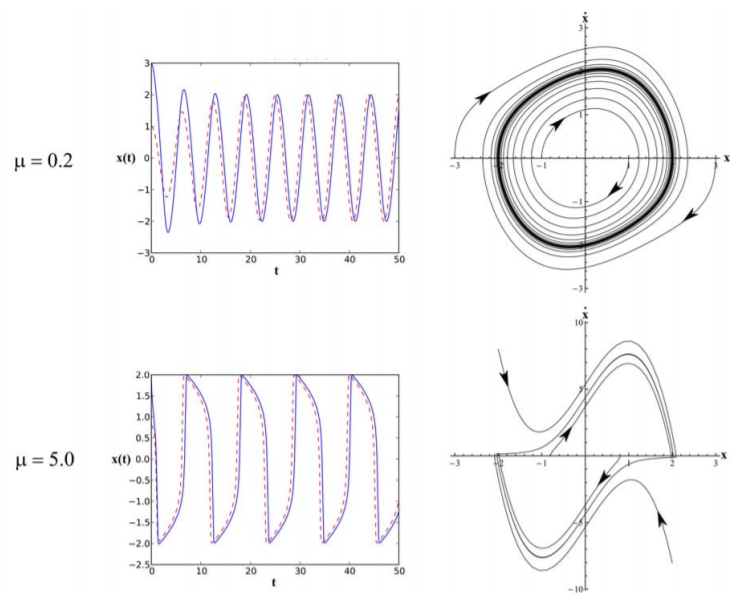
donde\(\rho\) y\(t_{0}\) son parámetros arbitrarios. Para la no linealidad débil,\( \mu <<1\) la Ecuación angular\ ref {4.20} tiene una frecuencia rotacional que es unidad ya que el\(\sin \theta \cos \theta\) término cambia signo dos veces por periodo, además del pequeño valor de\(\mu\). Para\(\mu <<1\) y\(r<1,\) la Ecuación radial\ ref {4.19} tiene un signo del\(\left( r^{2}\cos ^{2}\theta -1\right)\) término que es positivo y así el radio aumenta monótonamente a la unidad. Para\(r>1,\) el soporte es predominantemente negativo resultando en una disminución en espiral en el radio. Así, para una no linealidad muy débil, este comportamiento radial da como resultado la amplitud en espiral a un valor de atractor de ciclo límite bien definido\(\rho = 2\) como lo ilustran las gráficas estado-espacio en la Figura\(\PageIndex{2}\) para los casos en los que la condición inicial está dentro o fuera del atractor circular. La amplitud final para diferentes condiciones iniciales también se aproxima al mismo comportamiento asintótico.
No linealidad dominante:\(\mu >>1\)
Para el caso donde la no linealidad es dominante, es decir\(\mu >>1\), entonces como se muestra en la Figura\(\PageIndex{2}\), el sistema se acerca a un atractor bien definido, pero en este caso tiene una forma significativamente sesgada en estado-espacio, mientras que la amplitud se aproxima a una onda cuadrada. La solución permanece cerca de\(x = +2\) hasta\(y = \dot{x}\approx +7\) y luego se relaja rápidamente a\(x = -2\) con\(y = \dot{x} \approx 0.\) Esto es seguido por la imagen especular. Este comportamiento se llama vibración relajada en que una tensión se acumula lentamente y luego se disipa por un proceso de relajación repentino. El balancín es un ejemplo extremo de un oscilador de relajación donde el ángulo del balancín cambia espontáneamente de una solución a otra cuando la diferencia en sus brazos de momento cambia de signo.
El estudio de la retroalimentación en circuitos electrónicos fue el estímulo para el estudio de esta ecuación por van der Pol. Sin embargo, Lord Rayleigh identificó por primera vez dicho comportamiento del oscilador de relajación\(1880\) durante los estudios de vibraciones de un instrumento de cuerda excitado por un arco, o el chirrido de un tambor de freno. En su discusión sobre los efectos no lineales en acústica, derivó la ecuación
\[\ddot{x}-(a-b\dot{x}^{2})\dot{x}+\omega _{0}^{2}x\label{4.22}\]
Diferenciación de la Ecuación de Rayleigh\ ref {4.22} da
\[\dddot{x}-(a-3b\dot{x}^{2})\ddot{x}+\omega _{0}^{2}\dot{x} = 0\label{4.23}\]
Usando la sustitución de
\[y = y_{0}\sqrt{\frac{3b}{a}}\dot{x}\label{4.24}\]
lleva a las relaciones
\[\dot{x} = \sqrt{\frac{a}{3b}}\frac{y}{y_{0}}\hspace{1in}\ddot{x} = \sqrt{\frac{a }{3b}}\frac{\dot{y}}{y_{0}}\hspace{1in}\dddot{x} = \sqrt{\frac{a}{3b}}\frac{ \ddot{y}}{y_{0}} \label{4.25}\]
Sustituyendo estas relaciones en la Ecuación\ ref {4.23} da
\[\sqrt{\frac{a}{3b}}\frac{\ddot{y}}{y_{0}}-\sqrt{\frac{a}{3b}}\left[ a-\frac{ 3ba}{b}\frac{\dot{y}^{2}}{y_{0}^{2}}\right] \frac{\dot{y}}{y_{0}}+\omega _{0}^{2}\sqrt{\frac{a}{3b}}\frac{y}{y_{0}} = 0\label{4.26}\]Multiplicar por\(y_{0}\sqrt{\frac{3b}{a}}\) y reorganizar conduce a la ecuación de van der Pol\[\ddot{y}-\frac{a}{y_{0}^{2}}(y_{0}^{2}-y^{2})\dot{y}-\omega _{0}^{2}y = 0 \label{4.27}\]
El ritmo de un latido cardiaco impulsado por un marcapasos es una aplicación importante donde la autoestabilización del atractor es una característica deseable para estabilizar un latido irregular del corazón; el término médico es arritmia. El mecanismo que conduce a la sincronización de las muchas células de marcapasos en el corazón y el cuerpo humano debido a la influencia de un marcapasos implantado se discute en el capítulo\( 14.12\). Otra aplicación biológica de los ciclos límite es la variación temporal de las poblaciones animales.
En resumen, la amortiguación no lineal del oscilador van der Pol conduce a un atractor autoestabilizado de ciclo límite único que es insensible a las condiciones iniciales. El oscilador van der Pol tiene muchas aplicaciones importantes como instrumentos musicales inclinados, circuitos eléctricos y anatomía humana como se mencionó anteriormente. El oscilador van der Pol ilustra las complicadas manifestaciones del movimiento que pueden exhibir los sistemas no lineales.