
4.E: Sistemas no lineales y caos (Ejercicios)
- Page ID
- 126724
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
- Considere el movimiento caótico del péndulo amortiguado impulsado cuya ecuación de movimiento viene dada por
\[{\small \ }\ddot{\phi}+\Gamma \dot{\phi}+\omega _{0}^{2}\sin \phi =\gamma \omega _{0}^{2}\cos \omega t \nonumber\]
para lo cual el exponente Lyapunov es\(\lambda =1\) con el tiempo medido en unidades del periodo de impulsión.
- Suponga que necesita predecir\(\phi \left( t\right)\) con precisión de\(\ 10^{-2}\)\(radians\), y que\(\phi \left( 0\right)\) se conoce el valor inicial dentro\(10^{-6}\)\(radians\). ¿Cuál es el horizonte de tiempo máximo\(t_{\max }\) para el que se puede\(\phi \left( t\right)\) predecir dentro de la precisión requerida?
- Supongamos que logras mejorar la precisión del valor inicial a\(10^{-9}\)\(radians\) (es decir, una mejora mil veces). ¿Cuál es el horizonte temporal ahora para lograr la precisión de\(10^{-2}\)\(radians\)?
- Por qué factor ha\(t_{\max }\) mejorado con la\( 1000-fold\) mejora en la medición inicial.
- ¿Qué implica esto con respecto a las predicciones a largo plazo del movimiento caótico?
- Un oscilador no lineal satisface la ecuación\(\ddot{x}+\dot{ x}^{3}+x=0.\) Encuentra las ecuaciones polares para el movimiento en el diagrama estado-espacio. Mostrar que cualquier trayectoria que comience dentro del círculo\(r<1\) circunda el origen infinitamente muchas veces en el sentido de las agujas del reloj. Mostrar además que estas trayectorias en el espacio estatal terminan en el origen.
- Considera el sistema de una masa suspendida entre dos muelles idénticos como se muestra.
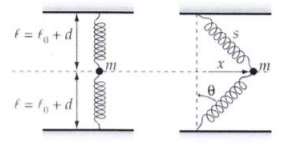
Figura\(\PageIndex{1}\)
Si cada resorte se estira una distancia\(d\) para unir la masa en la posición de equilibrio, la masa está sujeta a dos fuerzas de magnitud iguales y opuestas\(\kappa d\). Ignorar la gravedad. Demostrar que el potencial en el que se mueve la masa es aproximadamente\[U(x)=\left\{ \frac{\kappa d}{l}\right\} x^{2}+\left\{ \frac{\kappa (l-d)}{ 4l^{3}}\right\} x^{4}\]
Construir un diagrama estado-espacio para este potencial.
- Un oscilador no lineal satisface la ecuación
\[\ddot{x} + (x^{2}+\dot{x}^{2}-1) \dot{x} + x = 0 \nonumber\]
Encuentra las ecuaciones polares para el movimiento en el diagrama estado-espacio. Demostrar que cualquier trayectoria que comience en el dominio se\(1<r<\sqrt{3}\) espiraliza en sentido horario y tiende al ciclo límite\(r=1\). [Lo mismo ocurre con las trayectorias que inician en el dominio\(0<r<1\).] ¿Cuál es el periodo del ciclo límite?
- Una masa\(m\) se mueve en una dirección y está sujeta a una fuerza constante\(+F_{0}\) cuando\(x<0\) y a una fuerza constante\(-F_{0}\) cuando\(x>0\). Describir el movimiento mediante la construcción de un diagrama de espacio de estado. Calcular el periodo del movimiento en términos de\(m,F_{0}\) y la amplitud\(A\). No tenga en cuenta la amortiguación.
- Investigar el movimiento de una masa no amortiguada sujeta a una fuerza de la forma\[F(x)= ( \begin{array}{c} -kx\hspace{1.2in}\left\vert x\right\vert <a \\ -(k+\delta )x+\delta a\hspace{0.55in}\left\vert x\right\vert >a \end{array} \nonumber\]