
5.2: Ecuación Diferencial de Euler
- Page ID
- 126481
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
El cálculo de las variaciones, aquí presentado, subyace a los poderosos enfoques variacionales que se desarrollaron para la mecánica clásica. El cálculo variacional, desarrollado para la mecánica clásica, ahora se ha convertido en un enfoque esencial para muchas otras disciplinas de la ciencia, la ingeniería, la economía y la medicina.
Para el caso especial de una dimensión, el cálculo de variaciones se reduce a variar la función de\(y(x)\) tal manera que el funcional escalar\(F\) es un extremo, es decir, es un máximo o mínimo, donde.
\[F=\int_{x_{1}}^{x_{2}}f\left[ y(x),y^{\prime }(x);x\right] dx\]
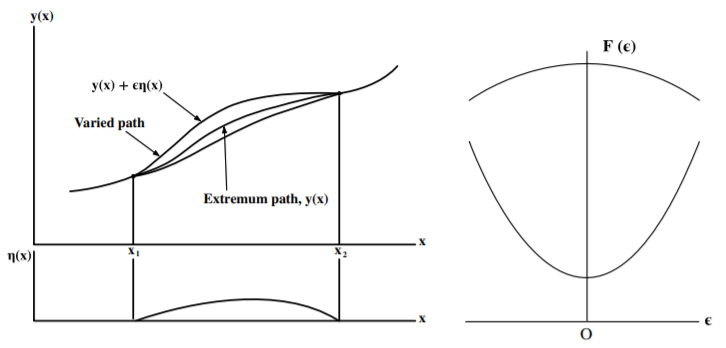
Aquí\(x\) está la variable independiente,\(y(x)\) la variable dependiente, más su primera derivada\(y^{\prime }\equiv \frac{dy}{dx}\). La cantidad\(f\left[ y(x),y^{\prime }(x);x\right]\) tiene alguna dependencia dada de\(y,y^{\prime }\) y\(x.\) El cálculo de variaciones implica variar la función\(y(x)\) hasta que\(F\) se encuentre un valor estacionario de, que se presume que es un extremo. Esto significa que si una función\( y=y(x)\) da un valor mínimo para el funcional escalar\(F\), entonces cualquier función vecina, sin importar qué tan cerca de\(y(x),\) debe aumentar\(F\). Para todos los caminos, la integral\(F\) se toma entre dos puntos fijos,\( x_{1},y_{1}\) y\(x_{2},y_{2}\). Las posibles trayectorias entre los puntos inicial y final se ilustran en la Figura\(\PageIndex{1}\). En relación con cualquier ruta vecina, el funcional\(F\) debe tener un valor estacionario que se presume que es la ruta extrema correcta.
Definir una función vecina usando una representación paramétrica\(y(\epsilon ,x),\) tal que for\(\epsilon =0\),\(y=y(0,x)=y(x)\) es la función que produce el extremo para\(F\). Supongamos que una fracción infinitesimalmente pequeña\( \epsilon\) de la función vecina\(\eta (x)\) se agrega a la ruta extrema\(y(x)\). Es decir, asumir
\[\begin{align} y(\epsilon ,x) & = y(0,x)+\epsilon \eta (x) \label{5.4} \\[4pt] y^{\prime }(\epsilon ,x) & \equiv \frac{dy(\epsilon ,x)}{dx}=\frac{dy(0,x)}{ dx}+\epsilon \frac{d\eta }{dx} \notag\end{align} \]
donde se asume que la función extrema\(y(0,x)\) y la función auxiliar\(\eta (x)\) son funciones bien comportadas de\(x\) con primeras derivadas continuas, y donde se\(\eta (x)\) desvanece en\(x_{1}\) y\(x_{2},\) porque, para todos los caminos posibles, la función\(y(\epsilon ,x)\) debe ser idéntica con\(y(x)\) en los puntos finales del camino, i.e\(\eta (x_{1})=\eta (x_{2})=0\). La situación se representa en la Figura\(\PageIndex{1}\). Es posible expresar cualquier familia paramétrica de curvas\(F\) en función de\(\epsilon\)
\[F(\epsilon )=\int_{x_{1}}^{x_{2}}f\left[ y(\epsilon ,x),y^{\prime }(\epsilon ,x);x\right] dx \label{5.5}\]
La condición de que la integral tenga un valor estacionario (extremo) es que\(F\) sea independiente de primer orden\(\epsilon\) a lo largo de la trayectoria. Es decir, el valor extremo ocurre para (\(\epsilon =0\)) donde
\[\left( \frac{dF}{d\epsilon }\right) _{\epsilon =0}=0 \label{5.6}\]
para todas las funciones\(\eta (x).\) Esto se ilustra en el lado derecho de la Figura\(\PageIndex{1}\).
Aplicando condición\ ref {5.6} a la ecuación\ ref {5.5}, y ya que\(x\) es independiente de\(\epsilon ,\) entonces
\[\frac{\partial F}{\partial \epsilon }=\int_{x_{1}}^{x_{2}}\left( \frac{ \partial f}{\partial y}\frac{\partial y}{\partial \epsilon }+\frac{\partial f }{\partial y^{\prime }}\frac{\partial y^{\prime }}{\partial \epsilon } \right) dx=0 \label{5.7}\]
Dado que los límites de integración son fijos, la operación diferencial afecta solo al integrando. De ecuaciones\ ref {5.4},\[\frac{\partial y}{\partial \epsilon }=\eta (x)\]
y\[\frac{\partial y^{\prime }}{\partial \epsilon }=\frac{d\eta }{dx}\]
Considerar el segundo término en el integrando\[\int_{x_{1}}^{x_{2}}\frac{\partial f}{\partial y^{\prime }}\frac{\partial y^{\prime }}{\partial \epsilon }dx=\int_{x_{1}}^{x_{2}}\frac{\partial f}{ \partial y^{\prime }}\frac{d\eta }{dx}dx\]
Integrar por partes
\[\int udv=uv-\int vdu\]da\[\int_{x_{1}}^{x_{2}}\frac{\partial f}{\partial y^{\prime }}\frac{d\eta }{dx} dx=\left[ \frac{\partial f}{\partial y^{\prime }}\eta (x)\right] _{x_{1}}^{x_{2}}-\int_{x_{1}}^{x_{2}}\eta (x)\frac{d}{dx}\left( \frac{ \partial f}{\partial y^{\prime }}\right) dx\]
Tenga en cuenta que el primer término en el lado derecho es cero ya que por definición\( \frac{\partial y}{\partial \epsilon }=\eta (x)=0\) en\(x_{1}\) y\(x_{2}.\) Así
\[\begin{align*} \frac{\partial F}{\partial \epsilon } &=\int_{x_{1}}^{x_{2}}\left( \frac{ \partial f}{\partial y}\frac{\partial y}{\partial \epsilon }+\frac{\partial f }{\partial y^{\prime }}\frac{\partial y^{\prime }}{\partial \epsilon } \right) dx \\[4pt] &=\int_{x_{1}}^{x_{2}}\left( \frac{\partial f}{\partial y}\eta (x)-\eta (x)\frac{d}{dx}\left( \frac{\partial f}{\partial y^{\prime }} \right) \right) dx \end{align*}\]
Así, la ecuación\ ref {5.7} se reduce a
\[\frac{\partial F}{\partial \epsilon }=\int_{x_{1}}^{x_{2}}\left( \frac{ \partial f}{\partial y}-\frac{d}{dx}\frac{\partial f}{\partial y^{\prime }} \right) \eta (x)dx\]
La función\(\frac{\partial F}{\partial \epsilon }\) será un extremo si está estacionaria en\(\epsilon =0\). Es decir,
\[\frac{\partial F}{\partial \epsilon }=\int_{x_{1}}^{x_{2}}\left( \frac{ \partial f}{\partial y}-\frac{d}{dx}\frac{\partial f}{\partial y^{\prime }} \right) \eta (x)dx=0\]
Esta integral ahora parece ser independiente de\(\epsilon .\) Sin embargo, las funciones\(y\) y\(y^{\prime }\) que ocurren en las derivadas son funciones de\(\epsilon\). Dado que\(\left( \frac{\partial F}{\partial \epsilon }\right) _{\epsilon =0}\) debe desvanecerse por un valor estacionario, y porque\( \eta (x)\) es una función arbitraria sujeta a las condiciones señaladas, entonces el integrando anterior debe ser cero. Esta derivación de que el integrando debe ser cero conduce a la ecuación diferencial de Euler
\[\frac{\partial f}{\partial y}-\frac{d}{dx}\frac{\partial f}{\partial y^{\prime }}=0\]
donde\(y\) y\(y^{\prime }\) son las funciones originales, independientes de\( \epsilon \). La base del cálculo de variaciones es que la función\( y(x)\) que satisface la ecuación de Euler es una función estacionaria. Tenga en cuenta que el valor estacionario podría ser un valor máximo o mínimo. Cuando la ecuación de Euler se aplica a sistemas mecánicos usando el Lagrangiano como funcional, entonces la ecuación diferencial de Euler se llama la ecuación de Euler-Lagrange.