
5.7: Sistemas Variacionales Constreñidos
- Page ID
- 126459
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Imponer una restricción a un sistema variacional implica:
- \(y_{i}(x)\)Las coordenadas\(N\) restringidas se correlacionan lo que viola la suposición hecha en el capítulo de\(5.5\) que las\(N\) variables son independientes.
- El movimiento restringido implica que las fuerzas de restricción deben actuar para dar cuenta de la correlación de las variables. Estas fuerzas de restricción deben ser tomadas en cuenta en las ecuaciones de movimiento.
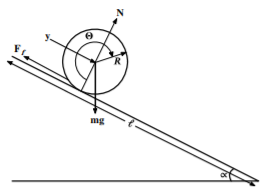
Por ejemplo, para un disco rodando por un plano inclinado sin deslizarse, hay tres coordenadas\(x\) [perpendicular a la cuña],\(y\), [A lo largo de la superficie de la cuña], y el ángulo de rotación que\(\theta\) se muestra en la Figura\(\PageIndex{1}\). Las fuerzas de restricción\(\mathbf{F}_{f}\)\(\mathbf{N}\),, conducen a la correlación de las variables tales que\(x=R\), mientras\(y=R\theta\). Básicamente sólo hay una variable independiente, que puede ser cualquiera\(y\) o\(\theta \). El uso de una sola variable independiente entierra esencialmente las fuerzas de restricción debajo de la alfombra, lo cual está bien si solo necesitas conocer la ecuación del movimiento. Si necesita determinar las fuerzas de restricción entonces es necesario incluir todas las coordenadas explícitamente en las ecuaciones de movimiento como se analiza a continuación.
Restricciones holonómicas
La mayoría de los sistemas implican restricciones o restricciones que acoplan las coordenadas. Por ejemplo, el\(y_{i}(x)\) puede estar confinado a una superficie en el espacio de coordenadas. Las restricciones significan que las coordenadas no\(y_{i}(x)\) son independientes, sino que están relacionadas por ecuaciones de restricción. Una restricción se llama holonómica si las ecuaciones de restricción se pueden expresar en forma de una ecuación algebraica que especifica directa e inequívocamente la forma de la superficie de restricción. Una restricción no holonómica no proporciona una relación algebraica entre las coordenadas correlacionadas. Además de la holonomía de las restricciones, las ecuaciones de restricción también se pueden agrupar en las siguientes tres clasificaciones dependiendo de si son algebraicas, diferenciales o integrales. Estas tres clasificaciones para las restricciones presentan diferentes holonomía relacionando las coordenadas acopladas. Afortunadamente, la solución de los sistemas restringidos se simplifica enormemente si las ecuaciones de restricción son holonómicas.
Ecuaciones geométricas (algebraicas) de restricción
Las restricciones geométricas se pueden expresar en forma de relaciones algebraicas que especifican directamente la forma de la superficie de restricción en el espacio de coordenadas\(q_{1},q_{2,}\dots ,q_{j},..q_{n}.\)
\[g_{k}(q_{1},q_{2},..q_{j},..q_{n};t)=0 \label{5.26}\]
donde\(j=1,2,3,\dots n\). Puede haber\(m\) tales ecuaciones de restricción donde\(0\leq k\leq m\). Un ejemplo de tal restricción geométrica es cuando el movimiento está confinado a la superficie de una esfera de radio\(R\) en el espacio de coordenadas que se puede escribir en la forma\(g=x^{2}+y^{2}+z^{2}-R^{2}=0.\) Tales ecuaciones de restricción algebraicas se llaman Holonómica que permite el uso de coordenadas generalizadas así como Multiplicadores de Lagrange para manejar tanto las fuerzas de restricción como la correlación de las coordenadas.
Ecuaciones cinemáticas (diferenciales) de restricción
Las ecuaciones de\(m\) restricción también se pueden expresar en términos de los desplazamientos infinitossimales de la forma
\[\sum_{j=1}^{n}\frac{\partial g_{k}}{\partial q_{j}}dq_{j}+\frac{\partial g_{k}}{\partial t}dt=0 \label{5.27}\]
donde\(k=1,2,3,\dots m\),\(j=1,2,3,\dots n\). Si la Ecuación\ ref {5.27} representa el diferencial total de una función entonces se puede integrar para dar una relación holonómica de la forma de Ecuación\ ref {5.26}. Sin embargo, si la Ecuación\ ref {5.27} no es el diferencial total, entonces es no holonómico y solo puede integrarse después de haber resuelto el problema completo.
Un ejemplo de ecuaciones de restricción diferencial es para una rueda que rueda sobre un plano sin deslizarse, lo cual es no holonómico y más complicado de lo que podría esperarse. La rueda que se mueve sobre un plano tiene cinco grados de libertad ya que la altura\(z\) es fija. Es decir, el movimiento del centro de masa requiere de dos coordenadas\(\left( x,y\right)\) más hay tres ángulos\((\phi ,\theta ,\psi )\) donde\(\phi\) está el ángulo de rotación para la rueda,\(\theta\) es el ángulo de pivote del eje, y\(\psi\) es el ángulo de inclinación de la rueda. Si la rueda se desliza entonces los cinco grados de libertad están activos. Si el eje de rotación de la rueda es horizontal, es decir, el ángulo de inclinación\(\psi =0\) es constante, entonces este sistema cinemático conduce a tres ecuaciones de restricción diferencial La rueda puede rodar con velocidad angular\(\dot{\phi}\), así como pivotar lo que corresponde a un cambio en\(\theta .\) Combinando estos cables a dos ecuaciones diferenciales de restricción
\[dx-a\sin \theta d\phi =0\hspace{1in}dy+a\cos \theta d\phi =0\]
Estas restricciones son insuficientes para proporcionar relaciones finitas entre todas las coordenadas. Es decir, las restricciones no se pueden reducir por integración a la forma de Ecuación\ ref {5.26} porque no hay relación funcional entre\(\phi\) y las otras tres variables,\(x,y,\theta\). Muchas trayectorias de rodadura son posibles entre dos puntos de contacto cualesquiera en el plano que están relacionados con diferentes ángulos de pivote. Es decir, el punto de contacto del disco podría pivotar más rodar en un círculo volviendo al mismo punto donde\(x,y,\theta\) están inalterados mientras que el valor de\(\phi\) depende de la circunferencia del círculo. Como consecuencia, la restricción de laminación no es holonómica excepto en el caso en que el disco rueda en línea recta y permanece vertical.
Ecuaciones isoperimétricas (integrales) de restricción
Las ecuaciones de restricción también se pueden expresar en términos de integrales directas. Esta situación se encuentra por problemas isoperimétricos, como encontrar el volumen máximo delimitado por una superficie de área fija, o la forma de una cuerda colgante de longitud fija. Las restricciones integrales ocurren en la economía cuando se minimiza algún algoritmo de costo sujeto a una restricción de costo total fija.
Un ejemplo sencillo de un problema isoperimétrico implica encontrar la curva de\(y=y(x)\) tal manera que la funcional tenga un extremo donde la curva\(y(x)\) satisfaga condiciones límite tales que\(y(x_{1})=a\) y\(y(x_{2})=b\), es decir
\[F(y)=\int_{x_{1}}^{x_{2}}f(y,y^{\prime };x)dx\]
es un extremo tal que el perímetro también está limitado a satisfacer
\[G(y)=\int_{x_{1}}^{x_{2}}g(y,y^{\prime };x)dx=l\]
donde\(l\) es una longitud fija. Esta restricción integral es geométrica y holonómica. Otro ejemplo es encontrar el área de superficie mínima de una superficie cerrada sujeta a que el volumen cerrado sea la restricción.
Propiedades de las ecuaciones de restricción
Restricciones holonómicas
Las restricciones geométricas se pueden expresar en forma de una ecuación algebraica que especifica directamente la forma de la superficie de restricción
\[g(y_{1},y_{2},y_{3},\dots ;x)=0 \label{5.31}\]
Tal sistema se llama holonómico ya que existe una relación directa entre las variables acopladas. Un ejemplo de tal restricción geométrica holonómica es si el movimiento está confinado a la superficie de una esfera de radio\(R\) que puede escribirse en la forma\[g=x^{2}+y^{2}+z^{2}-R^{2}=0\]
Restricciones no holonómicas
Existen muchas clasificaciones de restricciones no holonómicas que existen si la Ecuación\ ref {5.31} no se satisface. El enfoque algebraico es difícil de manejar cuando la restricción es una desigualdad, como el requisito de que la ubicación esté restringida para que se encuentre dentro de una capa esférica de radio\(R\) que puede expresarse como
\[g=x^{2}+y^{2}+z^{2}-R^{2}\leq 0\]
Este sistema restringido no holonómico tiene una restricción unilateral. Los sistemas suelen ser no holonómicos si la restricción es cinemática como se discutió anteriormente.
Restricciones holonómicas parciales
Las restricciones holonómicas parciales son holonómicas para un rango restringido de la superficie de restricción en el espacio de coordenadas, y este rango puede ser específico de un caso. Esto puede ocurrir si la fuerza de restricción es unilateral y perpendicular a la trayectoria. Un ejemplo es el péndulo con la masa unida al fulcro por una cuerda flexible que proporciona tensión pero no compresión. Entonces la longitud del péndulo es constante solo si la tensión en la cuerda es positiva. Así el péndulo será holonómico si las fuerzas gravitacionales más centrífugas son tales que la tensión en la cuerda es positiva, pero el sistema se vuelve no hononómico si la tensión es negativa como puede suceder cuando el péndulo gira a un ángulo vertical donde la fuerza centrífuga hacia afuera es insuficiente para compensar la componente vertical descendente de la fuerza gravitacional. Hay muchos otros ejemplos donde el movimiento de un objeto es holonómico cuando el objeto es presionado contra la superficie de restricción, como la superficie de la Tierra, pero no está restringido si el objeto abandona la superficie.
Dependencia del tiempo
Una restricción se llama escleronómica si la restricción no es explícitamente dependiente del tiempo. Esto ignora la dependencia del tiempo contenida dentro de la solución de las ecuaciones del movimiento. Afortunadamente una fracción importante de los sistemas son escleronómicos. La restricción se llama reonómica si la restricción es explícitamente dependiente del tiempo. Un ejemplo de un sistema reonómico es donde el tamaño o la forma de la superficie de restricción depende explícitamente del tiempo, como un neumático de desinflado.
Conservación de Energía
La solución depende de si la restricción es conservadora o disipativa, es decir, si la fricción o el arrastre están actuando. El sistema será conservador si no hay fuerzas de arrastre, y las fuerzas de restricción son perpendiculares a la trayectoria de la trayectoria como el movimiento de una partícula cargada en un campo magnético. Las fuerzas de restricción pueden ser el resultado del deslizamiento de dos superficies sólidas, el balanceo de objetos sólidos, el flujo de fluido en un líquido o gas, o el resultado de fuerzas electromagnéticas. La disipación de energía puede ser el resultado de fricción, arrastre en un fluido o gas, o resistencia finita de conductores eléctricos que conducen a la disipación de corrientes eléctricas inducidas en un conductor, por ejemplo, corrientes parásitas.
Una restricción de rodadura es inusual ya que la fricción entre los cuerpos rodantes es necesaria para mantener la rodadura. Un disco en un plano inclinado sin fricción conservará su momento angular ya que no hay par que actúe si el contacto rodante no tiene fricción, es decir, el disco simplemente se deslizará. Si la fricción es suficiente para dejar de deslizarse, entonces los cuerpos rodarán y no se deslizarán. Un cuerpo rodante perfecto no disipa energía ya que no se realiza ningún trabajo en el punto de contacto instantáneo donde ambos cuerpos están en movimiento relativo cero y la fuerza es perpendicular al movimiento. En la vida real, una rueda rodante puede implicar una disipación de energía muy pequeña debido a la deformación en el punto de contacto junto con propiedades no elásticas del material utilizado para hacer la rueda y la superficie plana. Por ejemplo, una llanta neumática puede calentarse y expandirse debido a la flexión de la llanta.
Tratamiento de las fuerzas de restricción en el cálculo variacional
Hay tres enfoques principales para manejar las fuerzas de restricción en el cálculo variacional. Los tres explotan la tremenda libertad y flexibilidad disponibles al usar coordenadas generalizadas. El (1) enfoque de coordenadas generalizadas, descrito en el capítulo\(5.8\), explota la correlación de las\(n\) coordenadas debido a las fuerzas de\(m\) restricción para reducir la dimensión de las ecuaciones de movimiento a\(s=n-m\) grados de libertad. Este enfoque incorpora las fuerzas de\(m\) restricción, en la elección de coordenadas generalizadas y no determina las fuerzas de restricción, (2) el enfoque multiplicador Lagrange, descrito en el capítulo\(5.9\), explota las coordenadas generalizadas pero incluye las fuerzas de\(m\) restricción en las ecuaciones de Euler para determinar tanto las fuerzas de restricción además de las\(n\) ecuaciones de movimiento. (3) Enfoque de fuerzas generalizadas, descrito en el capítulo\(6.7.3,\) introduce restricción y otras fuerzas explícitamente.