
6.7: Aplicaciones a sistemas no restringidos
- Page ID
- 126622
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Aunque la mayoría de los sistemas dinámicos implican movimiento restringido, es útil considerar ejemplos de sistemas sujetos a fuerzas conservadoras sin restricciones. Sin restricciones, las ecuaciones de Lagrange-Euler\((6.6.1)\) simplifican a\(\Lambda _{j}L=0\) dónde\(j=1,2,..n,\) y la transformación a coordenadas generalizadas no tiene ninguna consecuencia.
Ejemplo\(\PageIndex{1}\): Motion of a free particle, \(U=0\)
El Lagrangiano en coordenadas cartesianas es\(L= \frac{1}{2}m(\dot{x}^{2}+\dot{y}^{2}+\dot{z}^{2}).\) Entonces
\[\begin{aligned} \frac{\partial L}{\partial \dot{x}} &= m\dot{x} \\[4pt] \frac{\partial L}{\partial \dot{y}} &= m\dot{y} \\[4pt] \frac{\partial L}{\partial \dot{z}} &= m\dot{z} \\[4pt] \frac{\partial L}{\partial x} &= \frac{\partial L}{\partial y}=\frac{ \partial L}{\partial z}=0\end{aligned}\]
Insertar estos en la ecuación de Lagrange da
\[\begin{align*} \Lambda _{x}L &= \frac{d}{dt}\frac{\partial L}{\partial \dot{x}}-\frac{\partial L}{\partial x} \\[4pt] &=\frac{d}{dt}m\dot{x}-0=0 \end{align*}\]
Por lo tanto
\[\begin{align*} \mathit{\ }p_{x} &= m\dot{x}=constant \\[4pt] p_{y} &= m\dot{y}=constant \\[4pt] \mathit{\ }p_{z} &= m\dot{z}=constant\end{align*}\]
Es decir, esto demuestra que el impulso lineal se conserva si\(U\) es una constante, es decir, no se aplican fuerzas. Tenga en cuenta que la conservación del impulso se ha derivado sin ninguna referencia directa a las fuerzas.
Ejemplo\(\PageIndex{2}\): Motion in a uniform gravitational field
Considera que el movimiento está en el\(x-y\) plano. La energía cinética\(T= \frac{1}{2}m\left( \overset{.}{x}^{2}+\overset{.}{y}^{2}\right)\) mientras que la energía potencial es\(U=mgy\) donde\(U(y=0)=0.\) Así
\[L=\frac{1}{2}m\left( \overset{.}{x}^{2}+\overset{.}{y}^{2}\right) -mgy \nonumber\]
El uso de la ecuación de Lagrange para la\(x\) coordenada da
\[\begin{align*} \Lambda _{x}L &= \frac{d}{dt}\frac{\partial L}{\partial \overset{.}{x}}-\frac{ \partial L}{\partial x} \\[4pt] &=\frac{d}{dt}m\overset{.}{x}-0 \\[4pt] &=0 \end{align*}\]
Así\(m\dot{x}\) se conserva el impulso horizontal y\(\overset{..}{x}=0.\) La\(y\) coordenada da
\[ \begin{align*} \Lambda _{y}L &= \frac{d}{dt}\frac{\partial L}{\partial \overset{.}{y}}-\frac{ \partial L}{\partial y} \\[4pt] &=\frac{d}{dt}m\overset{.}{y}+mg \\[4pt] &=0 \end{align*}\]
Así, el lagrangiano produce los mismos resultados que los derivados usando las Leyes del Movimiento de Newton.
\[\ddot{x}=0 \nonumber\]
\[y=-g \nonumber\]
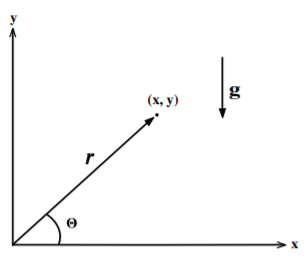
La importancia de seleccionar las coordenadas generalizadas más convenientes se ilustra muy bien tratando de resolver este problema usando coordenadas polares\(r,\theta ,\) donde\(r\) está la distancia radial y\(\theta\) el ángulo de elevación desde el\(x\) eje como se muestra en la figura adyacente. Entonces
\[T=\frac{1}{2}m\overset{.}{r}^{2}+\frac{1}{2}m\left( r\overset{.}{\theta } \right) ^{2} \nonumber\]
\[U=mgr\sin \theta \nonumber \]
Por lo tanto
\[L=\frac{1}{2}m\overset{.}{r}^{2}+\frac{1}{2}m\left( r\dot{\theta}\right) ^{2}-mgr\sin \theta \nonumber\]
\(\Lambda _{r}L=0\)para la\(r\) coordenada
\[r\dot{\theta}^{2}-g\sin \theta -\ddot{r}=0 \nonumber\]
\(\Lambda _{\theta }L=0\)para la\(\theta\) coordenada
\[-gr\cos \theta -2r\dot{r}\dot{\theta}-r^{2}\ddot{\theta}=0 \nonumber\]
Estas ecuaciones escritas en coordenadas polares son más complicadas que el resultado expresado en coordenadas cartesianas. Esto se debe a que la energía potencial depende directamente de la\(y\) coordenada, mientras que es una función de ambas\(r,\theta .\) Esto ilustra la libertad para usar diferentes coordenadas generalizadas, más la importancia de elegir un conjunto sensible de coordenadas generalizadas.
Ejemplo\(\PageIndex{3}\): Central forces
Considerar una masa que\(m\) se mueve bajo la influencia de una fuerza esféricamente simétrica, conservadora, atractiva y cuadrada inversa. El potencial entonces es
\[U=- \frac{k}{r} \nonumber\]
Es natural expresar lo lagrangiano en coordenadas esféricas para este sistema. Es decir,
\[L=\frac{1}{2}m\dot{r}^{2}+\frac{1}{2}m\left( r\dot{\theta}\right) ^{2}+\frac{ 1}{2}m(r\sin \theta \dot{\phi})^{2}+\frac{k}{r} \nonumber\]
\(\Lambda _{r}L=0\)para la\(r\) coordenada da\[m\ddot{r}-mr[\dot{\theta}^{2}+\sin ^{2}\theta \dot{\phi}^{2}]=\frac{k}{r^{2}} \nonumber\]
donde el\(mr\sin ^{2}\theta \dot{\phi}^{2}\) término proviene de la aceleración centrípeta.
\(\Lambda _{\phi }L=0\)para la\(\phi\) coordenada da
\[\frac{d}{dt}\left( mr^{2}\sin ^{2}\theta \dot{\phi}\right) =0 \nonumber\]
Esto implica que la derivada del momento angular alrededor del\(\phi\) eje,\(\dot{p}_{\phi }=0\) y por lo tanto\(p_{\phi }= mr^{2}\sin ^{2}\theta \dot{\phi}\) es una constante de movimiento.
\(\Lambda _{\theta }L=0\)para la\(\theta\) coordenada da
\[\frac{d}{dt}(mr^{2}\dot{\theta})-mr^{2}\sin \theta \cos \theta \dot{\phi} ^{2}=0 \nonumber\]
Es decir,\[\dot{p}_{\theta }=mr^{2}\sin \theta \cos \theta \dot{\phi}^{2}=\frac{p_{\phi }^{2}\cos \theta }{2mr^{2}\sin ^{3}\theta } \nonumber\]
Tenga en cuenta que\(p_{\theta }\) es una constante de movimiento si\(p_{\phi }=0\) y solo la coordenada radial está influenciada por la forma radial del potencial central.