
6.E: Dinámica Lagrangiana (Ejercicios)
- Page ID
- 126573
- Un disco de masa\(M\) y radio\(R\) rueda sin deslizarse por un plano inclinado desde la horizontal por un ángulo\(\alpha\). El disco tiene un eje corto y sin peso de radio insignificante. De este eje se suspende un simple péndulo de longitud\(l<R\) y cuyo bob tiene una masa\(m\). Supongamos que el movimiento del péndulo tiene lugar en el plano del disco.
- ¿Qué coordenadas generalizadas serían adecuadas para esta situación?
- ¿Hay alguna ecuación de restricción? Si es así, ¿qué son?
- Encuentra las ecuaciones de Lagrange para este sistema.
- Un lagrangiano para un sistema particular puede escribirse como
\[L=\frac{m}{2}(a\dot{x}^{2}+2b\dot{x}\dot{y}+c\dot{y}^{2})-\frac{K}{2} (ax^{2}+2bxy+cy^{2})\nonumber\]
donde\(a,b,\) y\(c\) son constantes arbitrarias, pero sujetas a la condición de que\(b^{2}-4ac\neq 0\).
- ¿Cuáles son las ecuaciones del movimiento?
- Examinar el caso\(a=0=c\). ¿Qué sistema físico representa esto?
- Examinar el caso\(b=0\) y\(a=-c\). ¿Qué sistema físico representa esto?
- Con base en sus respuestas a (b) y (c), determine el sistema físico representado por el lagrangiano dado anteriormente.
- Considera una partícula de masa\(m\) moviéndose en un plano y sujeta a una fuerza de atracción cuadrada inversa.
- Obtener las ecuaciones de movimiento.
- ¿Se conserva el momento angular sobre el origen?
- Obtener expresiones para las fuerzas generalizadas. Recordemos que las fuerzas generalizadas están definidas por\[Q_{j}=\sum_{i}F_{i}\frac{\partial x_{i}}{\partial q_{j}}.\nonumber\]
- Considerar una función lagrangiana de la forma\(L(q_{i},\dot{q_{i} },\ddot{q_{i}},t)\). Aquí el lagrangiano contiene una derivada temporal de las coordenadas generalizadas que es superior a la primera. Cuando se trabaja con tales lagrangianos, se emplea el término “mecánica generalizada”.
- Considera un sistema con un grado de libertad. Al aplicar los métodos del cálculo de las variaciones, y asumiendo que el principio de Hamilton se mantiene con respecto a las variaciones que mantienen ambas\(q\) y\(\dot{q}\) fijas en los puntos finales, muestran que la ecuación de Lagrange correspondiente es
\[\frac{d^{2}}{dt^{2}}\left( \frac{\partial L}{\partial \ddot{q}}\right) - \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{q}}\right) +\frac{ \partial L}{\partial q}=0.\nonumber\]
Tales ecuaciones de movimiento tienen aplicaciones interesantes en la teoría del caos.
- Aplica este resultado al Lagrangiano
\[L=-\frac{m}{2}q\ddot{q}-\frac{k}{2}q^{2}.\nonumber\]
¿Reconoces las ecuaciones del movimiento?
- Considera un sistema con un grado de libertad. Al aplicar los métodos del cálculo de las variaciones, y asumiendo que el principio de Hamilton se mantiene con respecto a las variaciones que mantienen ambas\(q\) y\(\dot{q}\) fijas en los puntos finales, muestran que la ecuación de Lagrange correspondiente es
- Un cordón de masa\(m\) se desliza bajo gravedad a lo largo de un alambre liso doblado en forma de parábola\(x^{2}=az\) en el\((x,z)\) plano vertical.
- ¿Sobre qué tipo (holonómico, no holonómico, escleronómico, reonómico) de restricción actúa\(m\)?
- Configure la ecuación de movimiento de Lagrange para\(x\) con la restricción incrustada.
- Configure las ecuaciones de movimiento de Lagrange para ambos\(x\) y\(z\) con la restricción unida y un multiplicador lagrangiano\(\lambda\) introducido.
- Mostrar que la misma ecuación de movimiento para\(x\) los resultados de cualquiera de los métodos utilizados en la parte (b) o parte (c).
- Expresar\(\lambda\) en términos de\(x\) y\(\dot{x}\).
- ¿Cuáles son los\(x\) y\(z\) componentes de la fuerza de restricción en términos de\(x\) y\(\dot{x}\)?
- Consideremos a los dos lagrangianos
\[L(q,\dot{q};t) \quad \mathrm{and} \quad L^{\prime }(q,\dot{q};t)=L(q, \dot{q};t)+\frac{dF(q,t)}{dt}\nonumber\]
donde\(F(q,t)\) es una función arbitraria de las coordenadas generalizadas\(q(t)\). Demostrar que estos dos lagrangianos producen las mismas ecuaciones de Euler-Lagrange. En consecuencia, se dice que dos lagrangianos que difieren sólo por una derivada de tiempo exacto son equivalentes.
- Considera el péndulo doble que comprende masas\(m_{1}\) y\(m_{2}\) conectado por cuerdas inextensibles como se muestra en la figura. Supongamos que el movimiento del péndulo tiene lugar en un plano vertical.
- ¿Hay alguna ecuación de restricción? Si es así, ¿qué son?
- Encuentra las ecuaciones de Lagrange para este sistema.
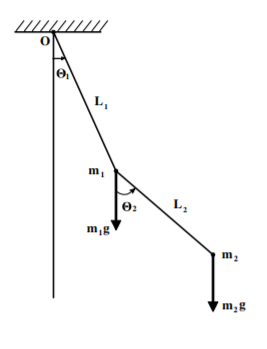
Figura\(\PageIndex{1}\)
- Consideremos el sistema que se muestra en la figura que consiste en una masa\(m\) suspendida a través de un eslabón restringido sin masa de longitud\(L\) donde el punto\(A\) es actuado por un resorte de constante de resorte\(k\). El resorte no se estira cuando el eslabón sin masa es horizontal. Supongamos que las restricciones holonómicas en\(A\) y\(B\) son sin fricción.
- Derivar las ecuaciones de movimiento para el sistema utilizando el método de multiplicadores Lagrange.
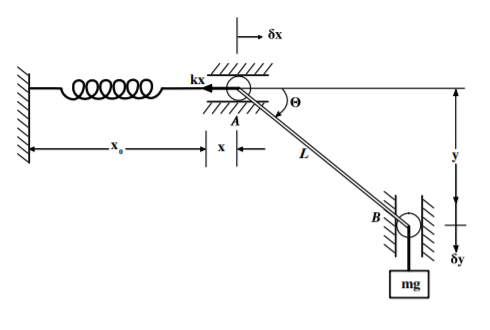
Figura\(\PageIndex{2}\)
- Derivar las ecuaciones de movimiento para el sistema utilizando el método de multiplicadores Lagrange.
- Considera un péndulo, con masa\(m\), conectado a un soporte de masa móvil (horizontalmente)\(M\).
- Determinar el Lagrangiano del sistema.
- Determinar las ecuaciones de movimiento para\(\theta \ll 1\).
- Encuentra una ecuación de movimiento en\(\theta\) solitario. ¿Cuál es la frecuencia de oscilación?
- ¿Para qué sirve la frecuencia de oscilación\(M\gg m\)? ¿Tiene sentido esto?
- Una esfera de radio\(\rho\) está restringida a rodar sin deslizarse sobre la mitad inferior de la superficie interna de un cilindro hueco de radio\(R.\) Determinar la función lagrangiana, la ecuación de restricción y las ecuaciones de movimiento de Lagrange. Encuentra la frecuencia de pequeñas oscilaciones.
- Una partícula se mueve en un plano bajo la influencia de una fuerza\(f = −Ar^{\alpha - 1}\) dirigida hacia el origen;\(A\) y\(\alpha (> 0)\) son constantes. Elija coordenadas generalizadas con la energía potencial cero en el origen.
- Encuentra las ecuaciones lagrangianas del movimiento.
- ¿Se conserva el momento angular sobre el origen?
- ¿Se conserva la energía total?
- Dos bloques, cada uno de masa\(M\), están conectados por una cadena de longitud uniforme y sin extensión\(l\). Un bloque se coloca sobre una superficie horizontal sin fricción, y el otro bloque cuelga sobre el costado, pasando la cuerda sobre una polea sin fricción. Describir el movimiento del sistema:
- cuando la masa de la cuerda es insignificante
- cuando la cadena tiene masa\(m\).
- Dos masas\(m_{1}\) y\(m_{2}\) \((m_{1}\neq m_{2})\)están conectadas por una varilla rígida de longitud\(d\) y de masa insignificante. Una cadena de longitud sin extensión\(l_{1}\) está unida\(m_{1}\) y conectada a un punto fijo del soporte\(P\). Del mismo modo una cadena de longitud\(l_{2}\) \((l_{1}\neq l_{2})\)conecta\(m_{2}\) y\(P\). Obtener la ecuación de movimiento que describe el movimiento en el plano de\(m_{1},m_{2},\) y\(P\), y encontrar la frecuencia de pequeña oscilación alrededor de la posición de equilibrio.
- Una varilla rígida uniforme delgada de longitud\(2L\) y masa\(M\) está suspendida por una cuerda de longitud sin masa\(l\). Inicialmente el sistema está colgando verticalmente hacia abajo en el campo gravitacional\(g\). Utilizar como coordenadas generalizadas los ángulos dados en el diagrama.
- Derivar el Lagrangiano para el sistema.
- Usa el Lagrangiano para derivar las ecuaciones de movimiento
- Una fuerza impulsiva horizontal\(F_{x}\) en la\(x\) dirección golpea el extremo inferior de la varilla por un tiempo infinitossimal\(\tau\). Derivar las condiciones iniciales para el sistema inmediatamente después de que se haya producido el impulso.
- Dibuje un diagrama que muestre la geometría del péndulo poco después del impulso cuando los ángulos de desplazamiento sean significativos.
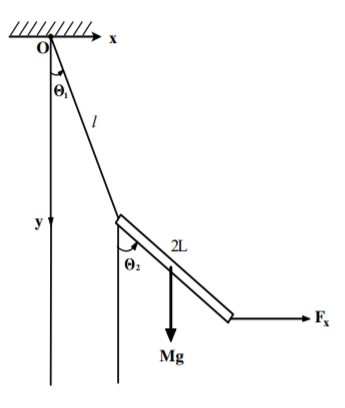
Figura\(\PageIndex{3}\)