
7.3: Transformaciones invariantes y teorema de Noether
- Page ID
- 126327
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Una de las grandes ventajas de la mecánica lagrangiana es la libertad que permite en la elección de coordenadas generalizadas que pueden simplificar la derivación de las ecuaciones de movimiento. Por ejemplo, para cualquier conjunto de coordenadas,\(q_{j},\) una transformación de punto reversible puede definir otro conjunto de coordenadas de\( q_{j}^{\prime }\) tal manera que
\[q_{j}^{\prime }=q_{j}^{\prime }(q_{1},q_{2},..q_{n};t)\]
El nuevo conjunto de coordenadas generalizadas satisface las ecuaciones de movimiento de Lagrange con el nuevo
\[L(q^{\prime },\dot{q}^{\prime },t)=L(q,\dot{q},t)\]
El lagrangiano es un escalar, con unidades de energía, que no cambia si se cambia la representación de coordenadas. Así se\(L(q^{\prime },\dot{q} ^{\prime },t)\) puede derivar de\(L(q,\dot{q},t)\) sustituyendo la relación inversa\(q_{i}=q_{i}(q_{1}^{\prime },q_{2}^{\prime },..q_{n}^{\prime };t)\) en Es\(L(q,\dot{q},t).\) decir, el valor del lagrangiano\(L\) es independiente de qué representación de coordenadas se utiliza. Aunque la forma general de las ecuaciones de movimiento de Lagrange se conserva en cualquier transformación puntual, las ecuaciones explícitas de movimiento para las nuevas variables suelen verse diferentes de las que tienen las variables antiguas. Un ejemplo típico es la transformación de coordenadas cartesianas a esféricas. Para un sistema dado, puede haber transformaciones particulares para las cuales las ecuaciones explícitas de movimiento son las mismas tanto para las variables antiguas como para las nuevas. Las transformaciones para las que las ecuaciones de movimiento son invariantes, se denominan transformaciones invariantes. Se demostrará que si el lagrangiano no contiene explícitamente una coordenada particular de desplazamiento\(q_{i},\) entonces\(p_{i},\) se conserva el momento conjugado correspondiente. Esta relación se llama teorema de Noether que establece “Para cada simetría del lagrangiano, hay una cantidad conservada”.
El teorema de Noether se utilizará para considerar transformaciones invariantes para dos variables dependientes,\(x(t),\) y\(\theta (t),\) más sus momentos conjugados\(p_{x}\) y\(p_{\theta }\). Para un sistema cerrado, estos proveen hasta seis posibles leyes de conservación para los tres ejes. Luego discutiremos la variable independiente\(t,\) y su relación con el Teorema Generalizado de la Energía, que proporciona otra posible ley de conservación. Por simplicidad, estas discusiones asumirán que los sistemas son holonómicos y conservadores.
Las ecuaciones de Lagrange usando coordenadas generalizadas para sistemas holonómicos, se dieron por ecuación\((6.5.12)\) para ser
\[\left\{ \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{q}_{j}}\right) -\frac{ \partial L}{\partial q_{j}}\right\} =\sum_{k=1}^{m}\lambda _{k}\frac{ \partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\]
Esto se puede escribir en términos del impulso generalizado como
\[\left\{ \frac{d}{dt}p_{j}-\frac{\partial L}{\partial q_{j}}\right\} =\sum_{k=1}^{m}\lambda _{k}\frac{\partial g_{k}}{\partial q_{j}}(\mathbf{q} ,t)+Q_{j}^{EXC}\]
o equivalentemente como
\[\dot{p}_{j}=\frac{\partial L}{\partial q_{j}}+\left[ \sum_{k=1}^{m}\lambda _{k}\frac{\partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\right]\]
Tenga en cuenta que si el Lagrangiano\(L\) no contiene\(q_{i}\) explícitamente, es decir, el Lagrangiano es invariante a una traslación lineal, o equivalentemente, es espacialmente homogéneo, y si la fuerza de restricción del multiplicador de Lagrange y los términos de fuerza generalizada son cero, entonces
\[\frac{\partial L}{\partial q_{j}}+\left[ \sum_{k=1}^{m}\lambda _{k}\frac{ \partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\right] =0\]
En este caso la ecuación de Lagrange se reduce a
\[\dot{p}_{j}=\frac{dp_{j}}{dt}=0 \label{7.13}\]
La ecuación\ ref {7.13} corresponde a\(p_{j}\) ser una constante de movimiento. Dicho en palabras, el impulso generalizado\(p_{i}\) es una constante de movimiento si el lagrangiano es invariante a una traslación espacial de\(q_{i}\), y los términos de restricción más fuerza generalizada son cero. Expresado de otra manera, si el lagrangiano no contiene una coordenada dada\(q_{i}\) y la restricción correspondiente más las fuerzas generalizadas son cero, entonces se conserva el impulso generalizado asociado a esta coordenada. Tenga en cuenta que este ejemplo del teorema de Noether se aplica a cualquier componente de\(\mathbf{q}\). Por ejemplo, en el campo gravitacional uniforme en la superficie de la tierra, los lagrangianos no dependen de las\(y\) coordenadas\(x\) y en el plano horizontal, así\(p_{x}\) y\(p_{y}\) se conservan, mientras que, debido a la fuerza gravitacional, el lagrangiano sí depende de la vertical \(z\)eje y por lo tanto no\(p_{z}\) se conserva.
Ejemplo\(\PageIndex{1}\): Atwoods machine
Supongamos que el momento lineal se conserva para la máquina de Atwood que se muestra en la siguiente figura.
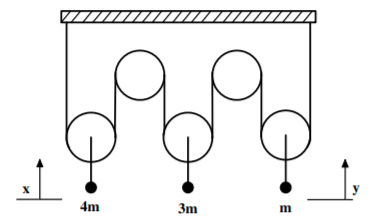
Que la masa izquierda suba una distancia\(x\) y la masa derecha suba una distancia\(y\). Entonces la masa media debe caer\(x+y\) para conservar la longitud de la cuerda. El lagrangiano del sistema es
\[L= \frac{1}{2}(4m)\dot{x}^{2}+\frac{1}{2}(3m)(-\dot{x}-\dot{y})^{2}+\frac{1}{2}m \dot{y}^{2}-\left( 4mgx+3mg(-x-y)+mgy\right) =\frac{7}{2}m\dot{x}^{2}+3m\dot{ x}\dot{y}+2m\dot{y}^{2}-mg(x-2y) \nonumber\]
Tenga en cuenta que la transformación
\[\begin{align*} x &= x_{0}+2\epsilon \\[4pt] y &=y_{0}+\epsilon\end{align*}\]
da como resultado el término de energía potencial\(mg(x-2y)=mg(x_{0}-2y_{0})\) que es una constante de movimiento. Como resultado el lagrangiano es independiente de lo\(\epsilon ,\) que significa que es invariante a la pequeña perturbación\(\epsilon ,\) y\(\frac{dL}{d\epsilon }=0.\) por lo tanto, según el teorema de Noether,\(P_{\epsilon }=\frac{dL}{d\dot{\epsilon}}\) se conserva el impulso lineal correspondiente. Este momento lineal conservado viene dado entonces por
\[\begin{align*} P_{\epsilon } &=\frac{dL}{d\dot{\epsilon}}=\frac{\partial L}{\partial \dot{x}} \frac{\partial \dot{x}}{\partial \dot{\epsilon}}+\frac{\partial L}{\partial \dot{y}}\frac{\partial \dot{y}}{\partial \dot{\epsilon}} \\[4pt] &=m(7\dot{x}+3\dot{y} )(2)+m(3\dot{x}+4\dot{y})=m(17\dot{x}+10\dot{y}) \end{align*}\]
Así, si el sistema inicia en reposo con\(P_{\epsilon }=0\), entonces\(\dot{x}\) siempre es igual\(-\frac{10}{17}\dot{y}\) ya que\(P_{\epsilon }\) es constante.
Tenga en cuenta que esto también se puede mostrar usando las ecuaciones de Euler-Lagrange en eso\(\Lambda _{x}L=0\) y\(\Lambda _{y}L=0\) dar
\[\begin{aligned} 7m\ddot{x}+3m\ddot{y} &=&-mg \\ 3m\ddot{x}+4m\ddot{y} &=&2mg\end{aligned}\]
Sumando la segunda ecuación al doble de la primera da
\[17m\ddot{x}+10m\ddot{y}=\frac{d}{dt}(17m\dot{x}+10m\dot{y})=0 \nonumber\]
Este es el resultado obtenido directamente usando el teorema de Noether.