
8.7: Sistemas de masa variable
- Page ID
- 126215
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Los mecánicos lagrangianos y hamiltonianos asumen que la masa total y la energía del sistema se conservan. Los sistemas de masa variable implican la transferencia de masa y energía entre cuerpos donantes y receptores. Sin embargo, tales sistemas aún pueden ser conservadores si el lagrangiano o el hamiltoniano incluyen todos los grados activos de libertad para el sistema combinado donador-receptor. Los siguientes ejemplos de sistemas de masa variable ilustran complicaciones sutiles que ocurren manejando tales problemas usando mecánica algebraica.
Propulsión de cohetes:
Se utilizó la mecánica newtoniana para resolver el problema del cohete en el capítulo\(2.12\). La ecuación de movimiento (\(2.12.23\)) que relaciona el empuje\(F_{ex}\) del cohete con la velocidad de cambio del momento se separó en dos términos,
\[F_{ex}=\dot{p}_{y}=m\ddot{y}+\dot{m}\dot{y}\]
El primer término es el habitual de masa por aceleración, mientras que el segundo término surge de la tasa de cambio de masa por la velocidad. La ecuación de movimiento para el movimiento del cohete se deriva fácilmente usando mecánicas lagrangianas o hamiltonianas al relacionar el empuje del cohete con la fuerza generalizada\(Q_{j}^{EXC}.\)
Cadenas móviles:
El movimiento de una cadena pesada flexible, sin fricción, que está cayendo en un campo gravitacional, a menudo se puede dividir en dos particiones acopladas de masa variable que tienen diferentes velocidades de eslabón de cadena. Estas particiones están acopladas en la intersección móvil entre las divisiones de cadena. Es decir, estas particiones comparten fracciones dependientes del tiempo de la masa total de la cadena. Las cadenas móviles fueron discutidas primero por Caley en\(1857\) y desde entonces el problema de las cadenas móviles ha tenido una historia polémica debido a la frecuente suposición errónea de que, en el campo gravitacional, las divisiones de cadena caen con aceleración en\(g\) lugar de aplicar la correcta conservación de energía suposición para este sistema conservador. Los siguientes dos ejemplos de sistemas conservadores de cadena descendente ilustran soluciones obtenidas usando principios variacionales aplicados a una sola cadena que se divide en dos secciones de longitud variable. 1
Considere los siguientes dos escenarios posibles para el movimiento de una cadena flexible, pesada, sin fricción, ubicada en un campo gravitacional uniforme\(g\). El primer escenario es el sistema de “cadena plegada” que asume que un extremo de la cadena se mantiene fijo, mientras que el extremo libre adyacente se libera a la misma altitud que la parte superior del brazo fijo, y este extremo libre puede caer en el campo gravitacional constante\(g\). El segundo escenario de “cadena descendente”, supone que un extremo de la cadena cuelga a través de un agujero en una mesa horizontal, lisa, rígida, sin fricción, con la partición estacionaria de la cadena asentada sobre la mesa rodeando el agujero. La sección que cae de esta cadena está siendo sacada de la pila estacionaria por la partición colgante. Ambos sistemas son conservadores ya que se supone que la masa total de la cadena es fija, y no están actuando fuerzas disipativas. Se supone que las cadenas son inextensibles, flexibles y sin fricción, y están sujetas a un campo gravitacional uniforme\(g\) en\(y\) dirección vertical. En ambos ejemplos, la cadena, con masa\(M\) y longitud\(L,\) se divide en un segmento estacionario, más un segmento móvil, donde está la masa por unidad de longitud de la cadena\(\mu =\frac{M}{L}\). Estos tabiques están fuertemente acoplados en su intersección que se propaga hacia abajo con el tiempo para la “cadena plegada” y se propaga hacia arriba, con relación al extremo inferior de la cadena descendente, para la “cadena descendente”. Para la “cadena plegada”, los eslabones de la cadena se transfieren del segmento móvil al segmento estacionario a medida que cae la sección móvil. Por el contrario, para el “sistema de caída”, los eslabones de la cadena se transfieren desde la sección superior estacionaria al segmento inferior móvil de la cadena.
Ejemplo\(\PageIndex{1}\): Folded chain
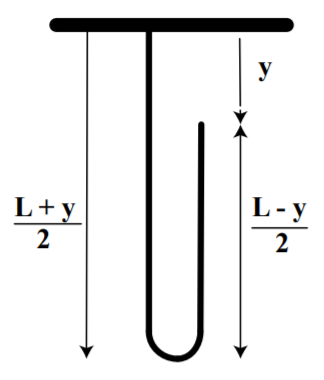
La cadena plegada de longitud\(L\) y masa por unidad de longitud\(\mu =\frac{M}{L}\) cuelga verticalmente hacia abajo en un campo gravitacional\(g\) con ambos extremos sostenidos inicialmente a la misma altura. El extremo fijo se fija a un soporte fijo mientras que el extremo libre de la cadena se baja al tiempo\(t=0\) con el extremo libre a la misma altura y adyacente al extremo fijo. \(y\)Sea la distancia que el extremo libre que cae está por debajo del extremo fijo. Usando una suposición unidimensional idealizada, el lagrangiano\(\mathcal{L}\) viene dado por
\[\mathcal{L}(y,\dot{y})=\frac{M}{4L}(L-y)\dot{y}^{2}+Mg\frac{1}{4L} (L^{2}+2Ly-y^{2})\]
donde el soporte en el segundo término es la altura del centro de masa de la cadena plegada con respecto al extremo superior fijo de la cadena.
El hamiltoniano está dado por
\[H(y,p_{R})=p_{R}\dot{y}-\mathcal{L}(y,\dot{y})=\frac{p_{_{R}}}{\mu \left( L-y\right) }-Mg\frac{(L^{2}+2Ly-y^{2})}{4L}\]
donde\(p_{R}\) está el momento lineal del brazo derecho de la cadena plegada.
Como se muestra en la discusión del Teorema de la Energía Generalizada, (capítulos\(7.8\) y\(7.9\)), cuando todas las fuerzas activas están incluidas en el lagrangiano y el hamiltoniano, entonces la energía mecánica total\(E\) es dada por\(E=H.\) Además, tanto el lagrangiano como el hamiltoniano son tiempo independiente, ya que
\[\frac{dE}{dt}=\frac{dH}{dt}=-\frac{\partial \mathcal{L}}{\partial t}=0\]
Por lo tanto, la “cadena plegada” hamiltoniana equivale a la energía total, que es una constante de movimiento. La conservación de energía para este sistema se puede utilizar para dar
\[\frac{\mu }{4}\left( L-y\right) \dot{y}^{2}-\frac{1}{4}\mu g(L^{2}+2Ly-y^{2})=-\frac{1}{4}\mu gL^{2}\]Resolver para\(\dot{y}^{2}\) da
\[\dot{y}^{2}=g\frac{(2Ly-y^{2})}{L-y} \label{8.74}\]
La aceleración del brazo descendente,\(\ddot{y},\) se da tomando el tiempo derivado de la Ecuación\ ref {8.74}
\[\ddot{y}=g+\frac{g\left( 2Ly-y^{2}\right) }{2\left( L-y\right) }\]
La tasa de cambio en el momento lineal para el lado derecho móvil de la cadena,\(\dot{p}_{R}\), viene dada por
\[\dot{p}_{R}=m_{R}\ddot{y}+\dot{m}_{R}\dot{y}=m_{R}g+m_{R}g\frac{(2Ly-y^{2})}{ 2\left( L-y\right) } \label{8.76}\]
Para esta cadena conservadora de energía, la tensión en la cadena\(T_{0}\) en el extremo fijo de la cadena viene dada por
\[T_{0}=\frac{\mu g}{2}\left( L+y\right) +\frac{1}{4}\mu \dot{y}^{2} \label{8.77}\]
Las ecuaciones\ ref {8.74} y\ ref {8.76}, implican que la tensión\(T_{o}\) diverge al infinito cuando\(y\rightarrow L\). Calkin y March midieron la\(y\) dependencia de la tensión de la cadena en el soporte para la cadena plegada y observaron la\(y\) dependencia predicha. La tensión máxima fue la\(\simeq\)\(25Mg,\) cual es consistente con la predicha usando la Ecuación\ ref {8.77} después de tomar en cuenta el tamaño finito y la masa de eslabones individuales en la cadena. Este resultado es muy diferente al obtenido utilizando la errónea suposición de que el brazo derecho cae con la aceleración de caída libre\(g\), lo que implica una tensión máxima\(T_{0}=\)\(2Mg\). Así, el supuesto de caída libre no está de acuerdo con los resultados experimentales, además de violar la conservación de energía y los principios de la mecánica lagrangiana y hamiltoniana. Es decir, el resultado experimental demuestra inequívocamente que las predicciones de conservación de energía se aplican en contradicción con el supuesto erróneo de caída libre.
La característica inusual de los problemas de masa variable, como el problema de la cadena plegada, es que la tasa de cambio de impulso en la Ecuación\ ref {8.76} incluye dos contribuciones a la fuerza y tasa de cambio de impulso, es decir, incluye tanto el término de aceleración\(m_{R}\ddot{y}\) más el término de masa variable\(\dot{m}_{R}\dot{y}\) que da cuenta de la transferencia de materia en la intersección de los tabiques móviles y estacionarios de la cadena. En el punto de transición de la cadena, los eslabones móviles se transfieren desde la sección móvil y se agregan a la subsección estacionaria. Dado que esta sección móvil está cayendo hacia abajo, y la sección estacionaria es estacionaria, entonces el impulso transferido está en una dirección hacia abajo correspondiente a una fuerza descendente efectiva incrementada. Por lo tanto, la aceleración medida del brazo móvil en realidad es más rápida que\(g\). Un fenómeno relacionado es el fuerte sonido de crujido que se escucha al agrietarse un látigo.
Ejemplo\(\PageIndex{2}\): Falling chain
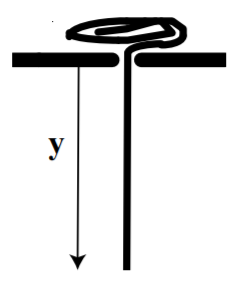
El escenario de “cadena descendente”, supone que un extremo de la cadena cuelga a través de un agujero en una mesa horizontal, lisa, rígida, sin fricción, con la partición estacionaria de la cadena tendida sobre la mesa sin fricción que rodea el agujero. La sección que cae de esta cadena está siendo sacada de la pila estacionaria por la partición colgante. El análisis para el problema de la cadena descendente se comporta de manera diferente a la cadena plegada. Para la “cadena de caída” deja\(y\) ser la distancia de caída del extremo inferior de la cadena medida con respecto al tablero de mesa. El lagrangio y el hamiltoniano están dados por\[\begin{aligned} \mathcal{L}(y,\dot{y}) &=&\frac{\mu }{2}y\dot{y}^{2}+\mu g\frac{y^{2}}{2} \\ p_{y} &=&\frac{\partial \mathcal{L}}{\partial \dot{y}}=\mu y\dot{y} \\ H &=&\frac{p_{y}^{2}}{2\mu y}-\frac{\mu gy^{2}}{2}=E\end{aligned}\]
El lagrangiano y el hamiltoniano no dependen explícitamente del tiempo, y el hamiltoniano equivale a la energía total inicial,\(E_{0}\). Por lo tanto, la conservación de energía se puede utilizar para dar que
\[E=\frac{1}{2}\mu y(\dot{y}^{2}-gy)=E_{0}\]
La ecuación de movimiento de Lagrange da\[\dot{p}_{y}=m_{y}\ddot{y}+\dot{m}_{y}\dot{y}=m_{y}g+\frac{1}{2}\mu \dot{y} ^{2}=Mg-T_{0}\]
La diferencia importante entre la cadena plegada y la cadena descendente es que el componente móvil de la cadena descendente está ganando masa con el tiempo en lugar de perder masa. También la tensión en la cadena\(T_{0}\) reduce la aceleración de la cadena descendente haciéndola menor que el valor de caída libre\(g\). Esto contrasta con lo del sistema de cadena plegada donde la aceleración supera\(g\).
La discusión anterior muestra que Lagrangiano y Hamiltoniano pueden aplicarse a sistemas de masa variable si se incluyen los grados de libertad tanto del donante como del receptor para asegurar que se conserva la masa total.
1 Las conversaciones con el profesor Frank Wolfs estimularon la inclusión de estos dos ejemplos de cadenas móviles.