
8.6: Reducción de Ruthian
- Page ID
- 126222
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
El teorema de Noether establece que si la coordenada\(q_{j}\) es cíclica, y si el multiplicador de Lagrange más las contribuciones de fuerza generalizada para las\(j^{th}\) coordenadas son cero, entonces el impulso canónico de la variable cíclica,\(p_{j}, \) es una constante de movimiento como se discute en el capítulo\(7.3\). Por lo tanto, ambas\((q_{j}, p_{j})\) son constantes de movimiento para variables cíclicas, y estas\((q_{j}, p_{j})\) coordenadas constantes pueden ser factorizadas fuera del hamiltoniano\(H(\mathbf{p, q}, t\mathbf{)}\). Esto reduce el número de grados de libertad incluidos en el hamiltoniano. Por esta razón, las variables cíclicas se denominan variables ignorables en la mecánica hamiltoniana. Esta ventaja no se aplica a las\((q_{j}, \dot{q}_{j})\) variables utilizadas en la mecánica lagrangiana ya que no\(\dot{q}\) es una constante de movimiento para una coordenada cíclica. La capacidad de eliminar las variables cíclicas como incógnitas en el hamiltoniano es una valiosa ventaja de la mecánica hamiltoniana que se explota extensamente para resolver problemas, como se describe en el capítulo\(15\).
Es ventajoso tener la capacidad de explotar tanto las formulaciones lagrangianas como hamiltonianas simultáneamente cuando se manejan sistemas que involucran una mezcla de coordenadas cíclicas y no cíclicas. Las ecuaciones de movimiento para cada coordenada generalizada independiente se pueden derivar independientemente de las coordenadas generalizadas restantes. Así es posible seleccionar las formulaciones hamiltonianas o lagrangianas para cada coordenada generalizada, independientemente de lo que se utilice para las otras coordenadas generalizadas. Routh ideó una técnica híbrida elegante y útil que separa las coordenadas generalizadas cíclicas y no cíclicas para explotar simultáneamente las diferentes ventajas de las formulaciones hamiltoniana y lagrangiana de la mecánica clásica. El enfoque de reducción rutina divide el término de energía\(\sum_{i=1}^{n}p_{i} \dot{q}_{i}\) cinética en el hamiltoniano en un grupo cíclico, más un grupo no cíclico, i.e.
\[H(q_{1}, ..., q_{n};p_{1}, ...., p_{n};t)=\sum_{i=1}^{n}p_{i}\dot{q} _{i}-L=\sum_{cyclic}^{s}p_{i}\dot{q}_{i}+\sum_{noncyclic}^{n-s}p_{i}\dot{q} _{i}-L\]
La inteligente idea de Routh era definir una nueva función, llamada la Routhian, que incluya solo una de las dos particiones de los términos de energía cinética. Esto convierte al ruthian en hamiltoniano para las coordenadas para las que se incluyen los términos de energía cinética, mientras que el ruthian actúa como un lagrangiano negativo para las coordenadas donde se omite el término de energía cinética. Este libro define a dos rutianos.
\[\begin{align} R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q}_{s};p_{s+1}, ...., p_{n};t) &\equiv &\sum_{cyclic}^{m}p_{i}\dot{q}_{i}-L \\ R_{noncyclic}(q_{1}, ..., q_{n};p_{1}, ..., p_{s};\dot{q}_{s+1}, ...., \dot{q} _{n};t) &\equiv &\sum_{noncyclic}^{s}p_{i}\dot{q}_{i}-L\end{align}\]
El primero, Routhian, llamado\(R_{cyclic}, \) incluye los términos de energía cinética solo para las variables cíclicas, y se comporta como un hamiltoniano para las variables cíclicas, y se comporta como un lagrangiano para las variables no cíclicas. El segundo ruthian, llamado\(R_{non-cyclic}, \) incluye los términos de energía cinética solo para las variables no cíclicas, y se comporta como un hamiltoniano para las variables no cíclicas, y se comporta como un lagrangiano negativo para las variables cíclicas. Estos dos rutianos se complementan entre sí en que hacen que el ruthian sea un hamiltoniano para las variables cíclicas, o lo contrario donde el ruthian es un hamiltoniano para las variables no cíclicas. Los ruthians utilizan\((q_{i}, \dot{q}_{i})\) para denotar aquellas coordenadas para las que el ruthian se comporta como un lagrangiano, y\((q_{i}, p_{i})\) para aquellas coordenadas donde el ruthian se comporta como un hamiltoniano. Para la uniformidad, se supone que los grados de libertad entre ellos no\(1\leq i\leq s\) son cíclicos, mientras que los intermedios\(s+1\leq i\leq n\) son coordenadas cíclicas ignorables.
El Routhian es un híbrido de mecánica lagrangiana y hamiltoniana. Algunos libros de texto minimizan la discusión del rutiano con el argumento de que este enfoque híbrido no es fundamental. Sin embargo, el Routhian es ampliamente utilizado en ingeniería con el fin de derivar las ecuaciones de movimiento para sistemas giratorios. Además se utiliza cuando se trata de núcleos giratorios en física nuclear, moléculas rotativas en física molecular y galaxias rotativas en astrofísica. La técnica de reducción Routhian proporciona una manera poderosa de calcular las propiedades intrínsecas de un sistema giratorio en el marco de referencia giratorio. El enfoque rutiano se incluye en este libro de texto porque juega un papel importante en las aplicaciones prácticas de los sistemas rotativos, además de que ilustra muy bien las ventajas relativas de las formulaciones lagrangianas y hamiltonianas en mecánica.
R\(_{cyclic}\) - Routhian es un hamiltoniano para las variables cíclicas
El ruthiano cíclico\(R_{cyclic}\) se define asumiendo que las variables entre\(1\leq i\leq s\) son no cíclicas, donde\(s=n-m\), mientras que las\(m\) variables entre\(s+1\leq i\leq n\) son coordenadas cíclicas ignorables. El ruthiano cíclico\(R_{cyclic}\) expresa las coordenadas cíclicas en términos de las\((q, p)\) cuales son requeridas para su uso por las ecuaciones de Hamilton, mientras que las variables no cíclicas se expresan en términos de\((q, \dot{q})\) para su uso por las ecuaciones de Lagrange. Es decir, el rutiano cíclico\(R_{cyclic}\) se define como
\[R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q}_{s};p_{s+1}, ...., p_{n};t) \equiv \sum_{cyclic}^{m}p_{i}\dot{q}_{i}-L\]
donde la suma\(\sum_{cyclic}p_{i}\dot{q}_{i}\) es solo sobre las variables\(m\) cíclicas\(s+1\leq i\leq n\). Tenga en cuenta que el Lagrangiano se puede dividir en las partes cíclicas y no cíclicas
\[R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q} _{s};p_{s+1}, ...., p_{n};t)=\sum_{cyclic}^{m}p_{i}\dot{q} _{i}-L_{cyclic}-L_{noncyclic}\]
Los dos primeros términos de la derecha se pueden combinar para dar el hamiltoniano solo\(H_{cyclic}\) para las variables\(m\) cíclicas,\(i=s+1, s+2, .., n\), es decir
\[R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q} _{s};p_{s+1}, ...., p_{n};t)=H_{cyclic}-L_{noncyclic}\]
El rutiano\(R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q} _{s};p_{s+1}, ...., p_{n};t)\) también se puede escribir en forma alternativa
\[\begin{align} R_{cyclic}(q_{1}, ..., q_{n};\dot{q}_{1}, ..., \dot{q}_{s};p_{s+1}, ...., p_{n};t) &\equiv &\sum_{cyclic}^{m}p_{i}\dot{q}_{i}-L=\sum_{i=1}^{n}p_{i}\dot{q} _{i}-L-\sum_{noncyclic}^{s}p_{i}\dot{q} \\ &=&H-\sum_{noncyclic}^{s}p_{i}\dot{q}_{i}\end{align}\]
que se expresa como el Hamiltoniano completo menos el término de energía cinética para las coordenadas no cíclicas. El ruthian\(R_{cyclic}\) se comporta como un hamiltoniano para las coordenadas\(m\) cíclicas y se comporta como un lagrangiano negativo\(L_{noncyclic\text{ }}\) para todas las coordenadas\(s=n-m\) no cíclicas\(\ i=1, 2, ..., s.\) Así las ecuaciones de movimiento para las variables\(s\) no cíclicas se dan usando las ecuaciones de movimiento de Lagrange , mientras que el rutiano se comporta como un hamiltoniano\(H_{cyclic}\) para las variables cíclicas\(m\) ignorables\(i=s+1, ..., n.\)
Ignorando tanto el multiplicador Lagrange como las fuerzas generalizadas, entonces las ecuaciones particionadas de movimiento para las coordenadas generalizadas no cíclicas y cíclicas se dan en la Tabla\(\PageIndex{1}\).
| Ecuaciones de Lagrange | Ecuaciones de Hamilton | |
|---|---|---|
| Coordenadas | No cíclico:\(\ 1\leq i\leq s\) | Cíclicos:\(\ \left( s+1\right) \leq i\leq n\) |
| \(\frac{\partial R_{cyclic}}{\partial q_{i}}{\large =-}\frac{\partial L_{noncyclic}}{\partial q_{i}}\) | \(\frac{\partial R_{cyclic}}{\partial q_{i}} =-\dot{p}_{i}\) | |
| Ecuaciones de movimiento | ||
| \(\frac{\partial R_{cyclic}}{\partial \dot{q}_{i}}=-\frac{\partial L_{noncyclic}}{\partial \dot{q}_{i}}\) | \(\frac{\partial R_{cyclic}}{\partial p_{i}}=\dot{q}_{i}\) |
Así, hay coordenadas\(m\) cíclicas (ignorables)\((q, p)_{s+1}, ...., \left( q, p\right) _{n}\) que obedecen a las ecuaciones de movimiento de Hamilton, mientras que las primeras coordenadas\(s=n-m\) no cíclicas (no ignorables)\(\left( q, \dot{q} \right) _{1}, ...., \left( q, \dot{q}\right) _{s}\) para\(\ i=1, 2, ..., s\) obedecer ecuaciones de Lagrange. La solución para las variables cíclicas es trivial ya que son constantes de movimiento y así la Routhian\(R_{cyclic}\) ha reducido el número de ecuaciones de movimiento que deben resolverse de\(n\) a las variables\(s=n-m\) no cíclicas\(.\) Este Routhian proporciona una manera especialmente útil de reducir la número de ecuaciones de movimiento para sistemas giratorios.
Obsérvese que existen varias definiciones que se utilizan para definir al ruthian, por ejemplo algunos libros definen a este ruthian como siendo el negativo de la definición utilizada aquí para que corresponda a un lagrangiano positivo. Sin embargo, este signo generalmente se cancela al derivar las ecuaciones de movimiento, por lo que la convención de signos no es importante si se usa una convención de signo consistente.
R\(_{noncyclic}\) - Routhian es un hamiltoniano para las variables no cíclicas
Los\(R_{noncyclic}\) complementos ruthianos no cíclicos\(R_{cyclic}\). Nuevamente\(1\leq i\leq s\) se supone que las coordenadas generalizadas entre ellas son no cíclicas, mientras que las intermedias\(s+1\leq i\leq n\) son coordenadas cíclicas ignorables. Sin embargo, la expresión en términos de\((q, p)\) y\((q, \dot{q})\) se intercambian, es decir, las variables cíclicas se expresan en términos de\((q, \dot{q})\) y las variables no cíclicas se expresan en términos de lo\((q, p)\) cual es opuesto a lo que se utilizó para\(R_{cyclic}\).
\[\begin{align} R_{noncyclic}(q_{1}, ..., q_{n};p_{1}, ..., p_{s};\dot{q}_{s+1}, ...., \dot{q} _{n};t) &=&\sum_{noncyclic}^{s}p_{i}\dot{q}_{i}-L_{noncyclic}-L_{cyclic} \\ &=&H_{noncyclic}-L_{cyclic}\end{align}\]
Se puede escribir en una forma de uso frecuente
\[\begin{align} R_{noncyclic}(q_{1}, ..., q_{n};p_{1}, ..., p_{s};\dot{q}_{s+1}, ...., \dot{q} _{n};t) &\equiv &\sum_{noncyclic}^{s}p_{i}\dot{q}_{i}-L=\sum_{i=1}^{n}p_{i} \dot{q}_{i}-L-\sum_{cyclic}^{m}p_{i}\dot{q}_{i} \notag \\ &=&H-\sum_{cyclic}^{m}p_{i}\dot{q}_{i} \label{8.68} \end{align}\]
Este rutiano se comporta como un hamiltoniano para las variables\(s\) no cíclicas que se expresan en términos de\(q\) y\(p\) apropiadas para un hamiltoniano. Este ruthian escribe las coordenadas\(m\) cíclicas en términos de\(q\), y\(\dot{q} , \) apropiadas para un lagrangiano, que se tratan asumiendo que el Routhian\(R_{cyclic}\) es un lagrangiano negativo para estas variables cíclicas como se resume en la tabla\(\PageIndex{2}\).
| Ecuaciones de Hamilton | Ecuaciones de Lagrange | |
|---|---|---|
| Coordenadas | No cíclico:\(\ 1\leq i\leq s\) | Cíclicos:\(\ \left( s+1\right) \leq i\leq n\) |
| \(\frac{\partial R_{noncyclic}}{\partial q_{i}}=-\dot{p}_{i}\) | \(\frac{ \partial R_{noncyclic}}{\partial q_{i}}{\large =-}\frac{\partial L_{cyclic}}{ \partial q_{i}}\) | |
| Ecuaciones de movimiento | ||
| \(\frac{\partial R_{noncyclic}}{\partial p_{i}}=\dot{q}_{i}\) | \(\frac{ \partial R_{noncyclic}}{\partial \dot{q}_{i}}=-\frac{\partial L_{cyclic}}{ \partial \dot{q}_{i}}\) |
Este ruthiano no cíclico\(R_{noncyclic}\) es especialmente útil ya que equivale al hamiltoniano para las variables no cíclicas, es decir, se ha eliminado la energía cinética para el movimiento de las variables cíclicas. Tenga en cuenta que dado que las variables cíclicas son constantes de movimiento, entonces\(R_{noncyclic}\) es una constante de movimiento si\(H\) es una constante de movimiento. Sin embargo,\(R_{noncyclic}\) no equivale a la energía total ya que la transformación de coordenadas depende del tiempo, es decir,\(R_{noncyclic}\) corresponde a la energía de las partes no cíclicas del movimiento. Por ejemplo, cuando se usa para describir el movimiento rotacional,\(R_{noncyclic}\) corresponde a la energía en el marco de referencia fijo al cuerpo giratorio no inercial. Esto es especialmente útil en el tratamiento de sistemas giratorios tales como galaxias rotativas, maquinaria giratoria, moléculas o núcleos rotativos de deformación fuerte como se discute en el capítulo\(12.9.\)
El lagrangiano y el hamiltoniano son los enfoques algebraicos fundamentales de la mecánica clásica. El método de reducción Routhian es una valiosa técnica híbrida que explota un truco para reducir el número de variables que se tienen que resolver por problemas complicados que se encuentran en la ciencia y la ingeniería. El Routhian\(R_{noncyclic}\) proporciona el enfoque más útil para resolver las ecuaciones de movimiento para moléculas giratorias, núcleos deformados u objetos astrofísicos, ya que da al hamiltoniano en el marco de referencia giratorio fijo al cuerpo no inercial ignorando la energía rotacional del marco. Por el contrario, el Routhian cíclico\(R_{cyclic}\) es especialmente útil para explotar la mecánica lagrangiana para resolver problemas en la rotación de cuerpo rígido como el Tippe Top descrito en el ejemplo\(14.23.2\).
Tenga en cuenta que los lagrangianos, hamiltonianos, más\(R_{noncyclic}\) tanto los como los\(R_{noncyclic}\) ruthianos, todos son escalares bajo rotación, es decir, son rotacionalmente invariantes. Sin embargo, pueden expresarse en términos de las coordenadas ya sea en el marco estacionario o en un marco giratorio. La principal diferencia es que el rutiano incluye solo subconjuntos del término de energía cinética\(\sum_{j}p_{j}\dot{q}_{j}\). Los méritos relativos del uso de métodos de reducción lagrangianos, hamiltonianos\(R_{noncyclic}\) y\(R_{noncyclic}\) ruthianos, se ilustran con los siguientes ejemplos.
Ejemplo\(\PageIndex{1}\): Spherical pendulum using Hamiltonian mechanics
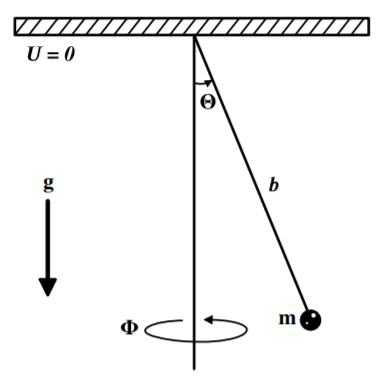
El péndulo esférico proporciona un caso de prueba simple para comparar el uso de la mecánica lagrangiana, mecánica hamiltoniana y ambos enfoques para la reducción rutina. En el ejemplo se describe la solución mecánica lagrangiana del péndulo esférico\(6.8.7\). La solución usando mecánica hamiltoniana se da en este ejemplo seguida de soluciones que utilizan ambos enfoques de reducción ruthiana.
Considerar las ecuaciones de movimiento de un péndulo esférico de masa\(m\) y longitud\(b\). Las coordenadas generalizadas son\(\theta , \phi\) ya que la longitud se fija en\(r=b.\) La energía cinética es
\[T= \frac{1}{2}mb^{2}\overset{.}{\theta }^{2}+\frac{1}{2}mb^{2}\sin ^{2}\theta \overset{.}{\phi }^{2} \nonumber\]
La energía potencial que\(U=-mgb\cos \theta\) le da
\[L(r, \theta , \phi , \dot{r}, \dot{\theta}, \dot{\phi})=\frac{1}{2}mb^{2}\overset{ .}{\theta }^{2}+\frac{1}{2}mb^{2}\sin ^{2}\theta \overset{.}{\phi } ^{2}+mgb\cos \theta\nonumber\]
Los momentos generalizados son
\[p_{\theta }=\frac{\partial L}{\partial \dot{\theta}}=mb^{2}\overset{.}{ \theta }\hspace{1in}p_{\phi }=\frac{\partial L}{\partial \dot{\phi}} =mb^{2}\sin ^{2}\theta \overset{.}{\phi }\nonumber\]
Dado que el sistema es conservador, y la transformación de coordenadas rectangulares a esféricas no depende explícitamente del tiempo, entonces el hamiltoniano se conserva y equivale a la energía total. Los momentos generalizados permiten que el hamiltoniano sea escrito como
\[H(r, \theta , \phi , p_{r}, p_{\theta }, p_{\phi })=\frac{p_{\theta }^{2}}{2mb^{2} }+\frac{p_{\phi }^{2}}{2mb^{2}\sin ^{2}\theta }-mgb\cos \theta\nonumber\]
Las ecuaciones de movimiento son\[\overset{.}{\dot{p}_{\theta }=-\frac{\partial H}{\partial \theta }=\frac{ p_{\phi }^{2}\cos \theta }{2mb^{2}\sin ^{3}\theta }}-mgb\sin \theta \tag{$a$} \label{a1}\]
\[\mathit{\dot{p}}_{\phi }\mathit{=-}\frac{\partial H}{\partial \phi }\mathit{ =0} \tag{$b$} \label{b1}\]
\[\mathit{\dot{\theta}=}\frac{\partial H}{\partial p_{\theta }}\mathit{=}\frac{ p_{\theta }}{mb^{2}} \tag{$c$} \label{c1}\]
\[\dot{\phi}=\frac{\partial H}{\partial p_{\phi }}=\frac{p_{\phi }}{mb^{2}\sin ^{2}\theta } \tag{$d$}\]Tómese el tiempo derivado de la ecuación\ ref {c1} y use\ ref {a1} para sustituir\(\dot{p}_{\theta }\) da eso\[\ddot{\theta}-\frac{p_{\phi }^{2}\cos \theta }{m^{2}b^{4}\sin ^{3}\theta }+ \frac{g}{b}\sin \theta =0 \tag{$e$}\]
Tenga en cuenta que la ecuación\ ref {b1} muestra que\(\phi\) es una coordenada cíclica. Así
\[p_{\phi }=mb^{2}\sin ^{2}\theta \dot{\phi}=\text{constant}\nonumber\]
es decir, se conserva el momento angular alrededor del eje vertical. Obsérvese que aunque\(p_{\phi }\) es una constante de movimiento,\(\dot{\phi }=\frac{p_{\phi }}{mb^{2}\sin ^{2}\theta }\) es una función de\(\theta , \) y por lo tanto en general no se conserva. Existen diversas soluciones dependiendo de las condiciones iniciales. Si\(p_{\phi }=0\) entonces el péndulo es solo el simple péndulo discutido anteriormente que puede oscilar, o rotar en la\(\theta\) dirección. El extremo opuesto es\(p_{\theta }=0\) donde el péndulo gira en la\(\phi\) dirección con constante\(\theta\). En general el movimiento es un acoplamiento complicado de los\(\phi\) movimientos\(\theta\) y.
Ejemplo\(\PageIndex{2}\): Spherical pendulum using \(R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta}, p_{\phi})\)
El lagrangiano para el péndulo esférico es
\[L(r, \theta , \phi , \dot{r}, \dot{\theta}, \dot{\phi})=\frac{1}{2}mb^{2}\dot{\theta}^{2}+\frac{1}{2 }mb^{2}\sin ^{2}\theta \dot{\phi}^{2}+mgb\cos \theta\nonumber\]
Tenga en cuenta que el lagrangiano es independiente de\(\phi\), por lo tanto\(\phi\) es una variable ignorable con
\[\dot{p}_{\phi }=\frac{\partial L}{\partial \phi }=-\frac{\partial H}{ \partial \phi }=0\nonumber\]
Por lo tanto\(p_{\phi }\) es una constante de movimiento igual a
\[p_{\phi }=\frac{\partial L}{\partial \dot{\phi}}=mb^{2}\sin ^{2}\theta \dot{ \phi}\nonumber\]
El Routhian\(R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta} , p_{\phi })\) iguala
\[\begin{aligned} R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta}, p_{\phi }) &=&p_{\phi }\dot{ \phi}-L \\ &=&-\left[ \frac{1}{2}mb^{2}\dot{\theta}^{2}+\frac{1}{2}mb^{2}\sin ^{2}\theta \dot{\phi}^{2}+mgb\cos \theta -mb^{2}\sin ^{2}\theta \dot{\phi} ^{2}\right] \\ &=&-\frac{1}{2}mb^{2}\dot{\theta}^{2}+\frac{1}{2}\frac{p_{\phi }^{2}}{ mb^{2}\sin ^{2}\theta }+mgb\cos \theta\end{aligned}\]
El ruthian\(R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta} , p_{\phi })\) se comporta como un hamiltoniano para\(\phi , \) y como un lagrangiano\(L^{\prime }=-R_{cyclic}\) para\(\theta\). Uso de ecuaciones canónicas de Hamilton para\(\phi\) dar
\[\begin{aligned} \dot{\phi} &=&\frac{\partial R_{cyclic}}{\partial p_{\phi }}=\frac{p_{\phi } }{mb^{2}\sin ^{2}\theta } \\ -\dot{p}_{\phi } &=&\frac{\partial R_{cyclic}}{\partial \phi }=0\end{aligned}\]
Estas dos ecuaciones muestran que\(p_{\phi }\) es una constante de movimiento dada por\[mb^{2}\sin ^{2}\theta \dot{\phi}=p_{\phi }=\text{ constant} \label{alpha} \tag{$\alpha $}\]
Tenga en cuenta que el hamiltoniano solo incluye la energía cinética para el\(\phi\) movimiento que es una constante de movimiento, pero esta energía no equivale a la energía total. Esta solución es lo que predice el teorema de Noether debido a la simetría de los lagrangianos alrededor del\(\phi\) eje vertical.
Ya que\(R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta}, p_{\phi })\) se comporta como un lagrangiano para\(\theta\) entonces la ecuación de Lagrange para\(\theta\) es
\[\Lambda _{\theta }L=\frac{d}{dt}\frac{\partial R_{cyclic}}{\partial \dot{ \theta}}-\frac{\partial R_{cyclic}}{\partial \theta }=0\nonumber\]
donde el signo negativo del lagrangiano en\(R_{cyclic}(r, \theta , \phi , \dot{r}, \dot{\theta}, p_{\phi })\) cancela. Esto lleva a
\[mb^{2}\ddot{\theta}=\frac{p_{\phi }^{2}\cos \theta }{mb^{2}\sin ^{3}\theta } -mgb\sin \theta\nonumber\]
es decir\[\ddot{\theta}-\frac{p_{\phi }^{2}\cos \theta }{m^{2}b^{4}\sin ^{3}\theta }+ \frac{g}{b}\sin \theta =0 \tag{$\beta $} \label{\beta}\]
Este resultado es idéntico al obtenido utilizando la mecánica lagrangiana en el ejemplo\(7.8.7\) y la mecánica hamiltoniana dada en el ejemplo\(\PageIndex{1}\). El ruthian\(R_{cyclic}\) simplificó el problema a un grado de libertad\(\theta\) al absorber en el hamiltoniano la\(\phi\) coordenada cíclica ignorable y su momento conjugado conservado\(p_{\phi }\). Tenga en cuenta que el término central en la Ecuación\ ref {\ beta} es el término centrífugo que se debe a la rotación alrededor del eje vertical. Este término es cero para el movimiento del péndulo plano cuando\(p_{\phi }=0\).
Ejemplo\(\PageIndex{3}\): Spherical pendulum using \(R_{noncyclic} (r, \theta , p_r , p_{\theta}, \dot{\phi})\)
Para un sistema rotacional, el Routhian\(R_{noncyclic}(r, \theta , \phi , p_{r}, p_{\theta }, \dot{\phi})\) también se puede utilizar para proyectar el hamiltoniano para las variables activas en el marco de referencia fijo al cuerpo giratorio. Considere el péndulo esférico donde el marco giratorio está rotando con velocidad angular\(\dot{\phi}\). El lagrangiano para el péndulo esférico es
\[L(r, \theta , \phi , \dot{r}, \dot{\theta}, \dot{\phi})=\frac{1}{2}mb^{2}\dot{\theta}^{2}+\frac{1}{2 }mb^{2}\sin ^{2}\theta \dot{\phi}^{2}+mgb\cos \theta\nonumber\]
Tenga en cuenta que el lagrangiano es independiente de\(\phi\), por lo tanto\(\phi\) es una variable ignorable con
\[\dot{p}_{\phi }=\frac{\partial L}{\partial \phi }=-\frac{\partial H}{ \partial \phi }=0\nonumber\]
Por lo tanto\(p_{\phi }\) es una constante de movimiento igual a
\[p_{\phi }=\frac{\partial L}{\partial \dot{\phi}}=mb^{2}\sin ^{2}\theta \dot{ \phi}\nonumber\]
El total hamiltoniano viene dado por
\[H(r, \theta , \phi , p_{r}, p_{\theta }, p_{\phi })=\sum_{i}p_{i}\dot{q}_{i}-L= \frac{p_{\theta }^{2}}{2mb^{2}}+\frac{p_{\phi }^{2}}{2mb^{2}\sin ^{2}\theta } -mgb\cos \theta\nonumber\]El Routhian para el marco giratorio de referencia\(H_{rot}\) viene dado por la Ecuación\ ref {8.68}, es decir
\[\begin{align} R_{noncyclic}(r, \theta , \phi , p_{r}, p_{\theta }, \dot{\phi}) &=&\sum_{i=1}^{n}p_{i}\dot{q}_{i}-p_{\phi }\dot{\phi}-L=H-p_{\phi }\dot{\phi} \notag \\ &=&\frac{p_{\theta }^{2}}{2mb^{2}}+\frac{p_{\phi }^{2}}{2mb^{2}\sin ^{2}\theta }-mgb\cos \theta -p_{\phi }\dot{\phi} \notag \\ &=&\frac{p_{\theta }^{2}}{2mb^{2}}-\frac{1}{2}mb^{2}\sin ^{2}\theta \dot{\phi }^{2}-mgb\cos \theta \label{gamma} \tag{$\gamma $}\end{align}\]
Esto se comporta como un lagrangiano negativo para\(\phi\) y un hamiltoniano para\(\theta\). Los momentos conjugados son
\[\begin{aligned} p_{\phi } &=&\frac{\partial L}{\partial \dot{\phi}}=-\frac{\partial R_{noncyclic}}{\partial \dot{\phi}}=mb^{2}\sin ^{2}\theta \dot{\phi} \\ \dot{p}_{\phi } &=&\frac{\partial L}{\partial \phi }=-\frac{\partial R_{noncyclic}}{\partial \phi }=0\end{aligned}\]
es decir,\(p_{\phi }\) es una constante de movimiento.
Las ecuaciones de movimiento de Hamilton dan
\[\begin{align} \dot{\theta} &=&\frac{\partial R_{noncyclic}}{\partial p_{\theta }}=\frac{ p_{\theta }}{mb^{2}} \tag{$\delta $} \label{delta} \\ -\dot{p}_{\theta } &=&\frac{\partial R_{noncyclic}}{\partial \theta }=-\frac{ p_{\phi }^{2}\cos \theta }{mb^{2}\sin ^{3}\theta }+mgb\sin \theta \tag{$\epsilon $} \label{epsilon} \end{align}\]
La ecuación\ ref {delta} da que
\[\frac{\partial }{\partial t}\dot{\theta}=\ddot{\theta}=\frac{\dot{p}_{\theta }}{mb^{2}}\nonumber\]
Insertar esto en la ecuación\ ref {épsilon} da
\[\ddot{\theta}-\frac{p_{\phi }^{2}\cos \theta }{m^{2}b^{4}\sin ^{3}\theta }+ \frac{g}{b}\sin \theta =0\nonumber\]
que es idéntica a la ecuación de movimiento\ ref {alpha} derivada usando\(R_{cyclic}\). El hamiltoniano en el marco giratorio es una constante de movimiento dada por\ ref {gamma}, pero no incluye la energía total.
Nótese que estos ejemplos muestran que ambas formas del ruthian, así como el formalismo lagrangiano completo, mostrado en el ejemplo\(7.8.7\), y el formalismo hamiltoniano completo, mostrado en el ejemplo\(\PageIndex{1}\), dan todas las mismas ecuaciones de movimiento. Esto ilustra que las mecánicas lagrangianas, hamiltonianas y ruthianas dan todas las mismas ecuaciones de movimiento y esto se aplica tanto en el marco inercial estático como en un marco giratorio ya que los lagrangianos, hamiltonianos y ruthianos son todos escalares bajo rotación, es decir, son rotacionalmente invariantes.
Ejemplo\(\PageIndex{4}\): Single particle moving in a vertical plane under the influence of an inverse-square central force
El lagrangiano para una sola partícula de masa que\(m, \) se mueve en un plano vertical y sujeta a una fuerza central cuadrada inversa central, se especifica por dos coordenadas generalizadas,\(r, \) y\(\theta .\)
\[L=\frac{m}{2}(\dot{r}^{2}+r^{2}\dot{\theta}^{2})+\frac{k}{r}\nonumber\]
La coordenada ignorable es\(\theta , \) ya que es cíclica. Que el impulso conjugado constante sea denotado por\(p_{\theta }=\frac{ \partial L}{\partial \dot{\theta}}=mr^{2}\dot{\theta}\). Entonces el ruthiano cíclico correspondiente es
\[R_{cyclic}(r, \theta , \dot{r}, p_{\theta })=p_{\theta }\dot{\theta}-L=\frac{p_{\theta }^{2}}{2mr^{2} }-\frac{1}{2}m\dot{r}^{2}-\frac{k}{r}\nonumber\]
Este ruthiano es el potencial unidimensional equivalente\(U(r)\) menos la energía cinética del movimiento radial.
La aplicación de la ecuación de Hamilton a la coordenada cíclica\(\theta\) da
\[\dot{p}_{\theta }=0\hspace{1in}\frac{p_{\theta }}{mr^{2}}=\dot{\theta}\nonumber\]
lo que implica una solución
\[p_{\theta }=mr^{2}\dot{\theta}=l\nonumber\]
donde el momento angular\(l\) es una constante.
La ecuación de Lagrange-Euler se puede aplicar a la coordenada no cíclica\(r\)
\[\Lambda _{r}L=\frac{d}{dt}\frac{\partial R_{cyclic}}{\partial \dot{r}}-\frac{ \partial R_{cyclic}}{\partial r}=0\nonumber\]donde el signo negativo de\(R_{cyclic}\) cancela. Esto lleva a la solución radial
\[m\ddot{r}-\frac{p_{\theta }^{2}}{mr^{3}}+\frac{k}{r^{2}}=0\nonumber\]
donde\(p_{\theta }=l\) que es una constante de movimiento en el término centrífugo. Así, el problema se ha reducido a un problema unidimensional en radio\(r\) que se encuentra en un marco de referencia giratorio.