
8.E: Mecánica Hamiltoniana (Ejercicios)
- Page ID
- 126212
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
1. Un bloque de masa\(m\) descansa sobre un plano inclinado formando un ángulo\(\theta\) con la horizontal. El plano inclinado (un bloque triangular de masa\(M\)) es libre de deslizarse horizontalmente sin fricción. El bloque de masa también\(m\) es libre de deslizarse sobre el bloque de masa más grande\(M\) sin fricción.
(a) Construir la función Lagrangiana.
(b) Derivar las ecuaciones de movimiento para este sistema.
(c) Calcular los momentos canónicos.
d) Construir la función hamiltoniana.
e) Encontrar cuál de los dos momentos que se encuentran en la parte c) es una constante de movimiento y discutir por qué es así. Si los dos bloques parten del reposo, ¿cuál es el valor de esta constante de movimiento?
2. Discutir entre ustedes las siguientes cuatro condiciones que pueden existir para los hamiltonianos y dar varios ejemplos de sistemas que exhiben cada una de las cuatro condiciones.
(a) El hamiltoniano se conserva e iguala la energía mecánica total
b) El hamiltoniano se conserva pero no equivale a la energía mecánica total
c) El hamiltoniano no se conserva sino que equivale a la energía mecánica total
d) El hamiltoniano no se conserva y no equivale a la energía mecánica total.
3. Un bloque de masa\(m\) descansa sobre un plano inclinado formando un ángulo\(\theta\) con la horizontal. El plano inclinado (un bloque triangular de masa\(M\)) es libre de deslizarse horizontalmente sin fricción. El bloque de masa también\(m\) es libre de deslizarse sobre el bloque de masa más grande\(M\) sin fricción.
(a) Construir la función Lagrangiana.
(b) Derivar las ecuaciones de movimiento para este sistema.
(c) Calcular los momentos canónicos.
d) Construir la función hamiltoniana.
e) Encontrar cuál de los dos momentos que se encuentran en la parte c) es una constante de movimiento y discutir por qué es así. Si los dos bloques parten del reposo, ¿cuál es el valor de esta constante de movimiento?
4. Discutir entre ustedes las siguientes cuatro condiciones que pueden existir para los hamiltonianos y dar varios ejemplos de sistemas que exhiben cada una de las cuatro condiciones.
a) El hamiltoniano se conserva e iguala la energía mecánica total
b) El hamiltoniano se conserva pero no equivale a la energía mecánica total
c) El hamiltoniano no se conserva sino que equivale a la energía mecánica total
d) El hamiltoniano no se conserva y no equivale a la energía mecánica total
5. Comparar el formalismo lagrangiano y el formalismo hamiltoniano mediante la creación de un gráfico de dos columnas. Etiquetar un lado “Lagrangiano” y el otro lado “Hamiltoniano” y discutir las similitudes y diferencias. Aquí hay algunas ideas para comenzar:
- ¿Cuáles son las variables básicas en cada formalismo?
- ¿Cuál es la forma y el número de las ecuaciones de movimiento derivadas en cada caso?
- ¿Cómo se compara el “espacio estatal” lagrangiano con el “espacio de fases” hamiltoniano?
6. Se puede demostrar que si\(L(q,\dot{q},t)\) es el lagrangiano de una partícula moviéndose en una dimensión, entonces\(L=L^{\prime }\) donde\(L^{\prime }(q,\dot{q},t)=L(q,\dot{q},t)+\frac{df}{dt}\) y\(f(q,t)\) es una función arbitraria. Este problema explora las consecuencias de esto en el formalismo hamiltoniano.
(a) Relacionar el nuevo impulso canónico\(p^{\prime }\), para\(L^{\prime }\), con el viejo impulso canónico\(p\), para\(L\).
(b) Expresar el nuevo hamiltoniano\(H^{\prime }(q^{\prime },p^{\prime },t)\) para\(L^{\prime }\) en términos del antiguo hamiltoniano\(H(q,p,t)\) y\(f\).
(c) Demostrar explícitamente que las nuevas ecuaciones de Hamilton para\(H^{\prime }\) son equivalentes a las antiguas ecuaciones de Hamilton para\(H\).
7. Un aro de radio sin masa\(R\) gira alrededor de un eje perpendicular a su eje central a velocidad angular constante\(\omega\). Una masa\(m\) puede deslizarse libremente alrededor del aro.
a) Determinar el lagrangiano del sistema.
b) Determinar el hamiltoniano del sistema. ¿Es igual a la energía mecánica total?
(c) Determinar el Lagrangiano del sistema con respecto a un marco de coordenadas en el que\(H=T+V_{\text{eff}}\). ¿Qué es\(V_{\text{ eff}}\)? ¿En qué fuerza genera el término adicional\(V_{\text{eff}}\)?
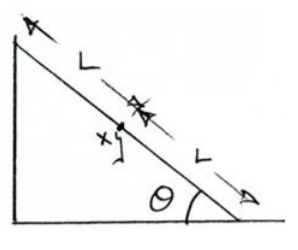
8. Considera un péndulo de longitud\(L\) unido al extremo de la varilla de longitud\(R\). La varilla gira a velocidad angular constante\(\omega\) en el plano. Supongamos que el péndulo está siempre tenso.
a) Determinar ecuaciones de movimiento.
(b) ¿Para qué valor de este sistema\(\omega ^{2}R\) es lo mismo que un péndulo plano en un campo gravitacional constante?
(c) Mostrar\(H \neq E\). ¿Cuál es la razón?
9. Una partícula de masa\(m\) en un campo gravitacional se desliza sobre el interior de una parábola de revolución lisa cuyo eje es vertical. Usando la distancia desde el eje\(r,\) y el ángulo azimutal\(\varphi\) como coordenadas generalizadas, encuentra lo siguiente.
a) El lagrangiano del sistema.
b) El momento generalizado y el correspondiente hamiltoniano
c) La ecuación de movimiento para la coordenada\(r\) en función del tiempo.
(d) Si\(\frac{d\varphi }{dt}=0,\) muestran que la partícula puede ejecutar pequeñas oscilaciones alrededor del punto más bajo del paraboloide y encontrar la frecuencia de estas oscilaciones.
10. Considere una partícula de masa\(m\) que está restringida a moverse sobre la superficie de una esfera de radio\(R\). No hay fuerzas externas de ningún tipo que actúen sobre la partícula.
a) ¿Cuál es el número de coordenadas generalizadas necesarias para describir el problema?
(b) Elegir un conjunto de coordenadas generalizadas y escribir el lagrangiano del sistema.
c) ¿Qué es el hamiltoniano del sistema? ¿Se conserva?
d) Demostrar que el movimiento de la partícula se encuentra a lo largo de un gran círculo de la esfera.
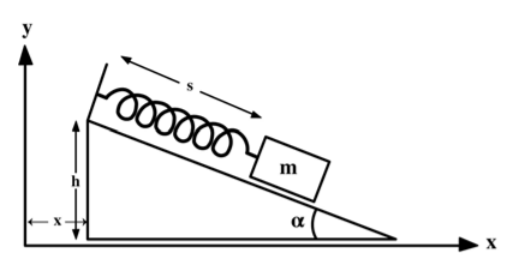
11. Un bloque de masa\(m\) se une a una cuña de masa\(M\) mediante un resorte con constante de resorte\(k\). La superficie inclinada sin fricción de la cuña forma un ángulo con respecto\(\alpha\) a la horizontal. La cuña es libre de deslizarse sobre una superficie horizontal sin fricción como se muestra en la figura.
(a) Dado que la longitud relajada del resorte es\(d\), encuentre los valores\(s_{0}\) cuando tanto el libro como la cuña estén estacionarios.
(b) Encontrar el Lagrangiano para el sistema en función de la\(x\) coordenada de la cuña y la longitud del resorte\(s\). Anota las ecuaciones de movimiento.
(c) ¿Cuál es la frecuencia natural de la vibración?
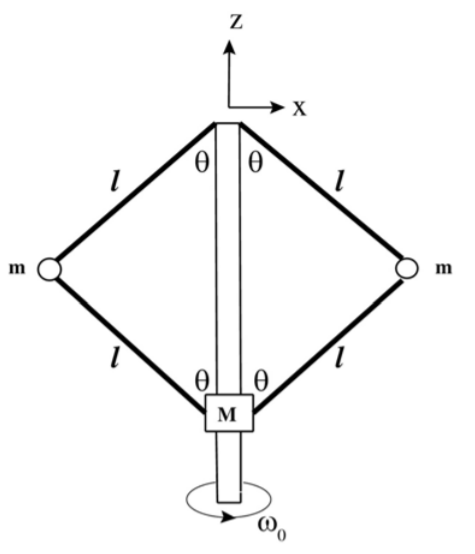
12. Un gobernador de bola de vuelo comprende dos masas\(m\) conectadas por 4 brazos articulados de longitud\(l\) a un eje vertical y a una masa\(M\) que puede deslizarse hacia arriba o hacia abajo del eje sin fricción en un campo gravitacional vertical uniforme como se muestra en la figura El conjunto está obligado a girar alrededor del eje del eje vertical con la misma velocidad angular que la del eje vertical. Descuidar la masa de los brazos, la fricción del aire, y asumir que la masa\(M\) tiene un momento de inercia insignificante. Supongamos que todo el sistema está obligado a girar con una velocidad angular constante\(\omega _{0}\).
(a) Elegir las coordenadas adecuadas y utilizar el lagrangiano para derivar ecuaciones de movimiento del sistema alrededor de la posición de equilibrio.
(b) Determinar la altura\(z\) de la masa\(M\) por encima de su posición más baja en función de\(\omega _{0}\).
(c) Encontrar la frecuencia de pequeñas oscilaciones sobre este movimiento constante.
(d) Derivar un rutiano que proporciona el hamiltoniano en el sistema giratorio.
e) ¿La energía total del gobernador fly-ball en el marco giratorio de referencia es constante en el tiempo?
(f) Supongamos que el eje y el conjunto no están limitados a girar a una velocidad\(\omega _{0}\) angular constante, es decir, se le permite girar libremente a velocidad angular\(\dot{\varphi}\). ¿Cuál es la diferencia en el movimiento general?
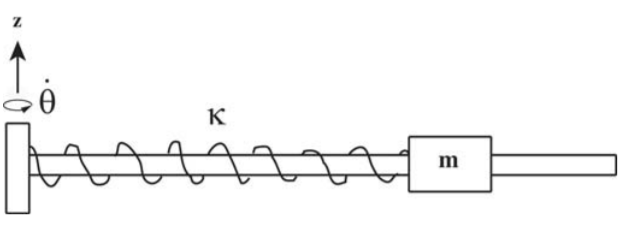
13. Una varilla rígida recta, sin fricción, sin masa, gira alrededor del\(z\) eje a una velocidad angular\(\dot{\theta}\). Una masa\(m\) se desliza a lo largo de la varilla sin fricción y se une a la varilla por un resorte sin masa de constante de resorte\(\kappa\).
a) Derivar el lagrangiano y el hamiltoniano
(b) Derivar las ecuaciones de movimiento en el marco estacionario utilizando la mecánica hamiltoniana.
c) ¿Cuáles son las constantes de movimiento?
(d) Si la rotación está obligada a tener una velocidad angular constante\(\dot{\theta}=\omega\), entonces el ruthiano no cíclico es\(R_{noncyclic}=H-p_{\theta }\dot{\theta}\) una constante de movimiento, y ¿equivale a la energía total?
(e) Utilizar el Routhian no cíclico\(R_{noncyclic}\) para derivar la ecuación radial de movimiento en el marco de referencia giratorio para el sistema acodado con\(\dot{\theta}=\omega\).
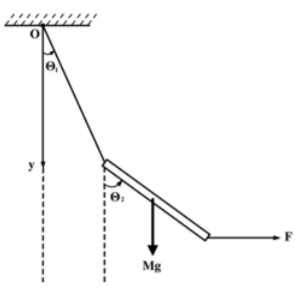
14. Una varilla delgada y uniforme de longitud\(2L\) y masa\(M\) se suspende de una cuerda sin masa de longitud\(l\) atada a un clavo. Inicialmente la varilla cuelga verticalmente. \(F\)Se aplica una fuerza horizontal débil al extremo libre de la varilla.
(a) Escribir el lagrangiano para este sistema.
(b) Por tiempos muy cortos tales que todos los ángulos sean pequeños, determinar los ángulos que la cuerda y la varilla hacen con la vertical. Comience desde el descanso en\(t=0.\)
(c) Dibujar un diagrama para ilustrar el movimiento inicial de la varilla.
15. Una escalera uniforme de masa\(M\) y longitud\(2L\) está apoyada contra una pared vertical sin fricción con sus pies en un piso horizontal sin fricción. Inicialmente la escalera estacionaria se libera en ángulo\(\theta _{0}=60^{\circ }\) con respecto al piso. Supongamos que el campo de gravitación\(g=9.81m/s^{2}\) actúa verticalmente hacia abajo y que el momento de inercia de la escalera alrededor de su punto medio es\(I=\frac{1}{3}ML^{2}\).
(a) Derivar el Lagrangiano
b) Derivar el Hamiltoniano
(c) Explicar si el hamiltoniano está conservado y/o si es igual a la energía total
(d) Utilizar el Lagrangiano para derivar las ecuaciones de movimiento
e) ¿Derivar el ángulo\(\theta\) en el que la escalera pierde contacto con la pared vertical?
16. El examen de mecánica clásica induce a Jacob a probar suerte en el puenting. Supongamos que la masa de Jacob\(m\) está suspendida en un campo gravitacional por el bungee de longitud no estirada\(b\) y constante de resorte\(k\). Además de las oscilaciones longitudinales debidas al puenting, Jacob también se balancea con movimiento de péndulo plano en un plano vertical. Usa coordenadas polares\(r,\phi\), descuida el arrastre aéreo y asume que el bungee siempre está bajo tensión.
(a) Derivar el Lagrangiano
(b) Determinar la ecuación de movimiento de Lagrange para el movimiento angular e identificar por nombre las fuerzas que contribuyen al movimiento angular.
(c) Determinar la ecuación de movimiento de Lagrange para la oscilación radial e identificar por nombre las fuerzas que contribuyen a la tensión en el resorte.
d) Derivar el momento generalizado
e) Determinar el hamiltoniano y dar todas las ecuaciones de movimiento de Hamilton.
2 Lectura recomendada: “Mecánica Clásica” H. Goldstein, Addison-Wesley, Reading (1950). El presente capítulo sigue de cerca la notación utilizada por Goldstein para facilitar las referencias cruzadas y la lectura de los muchos otros libros de texto que han adoptado esta notación.