
9.2: El principio de acción estacionaria de Hamilton
- Page ID
- 126405
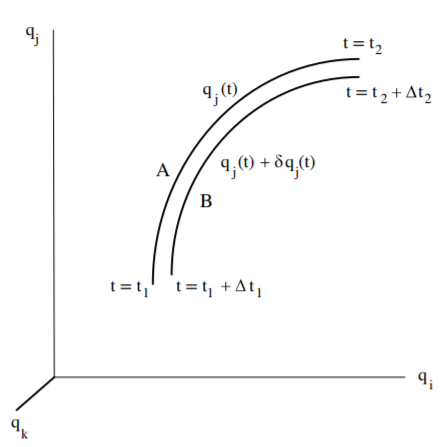
El logro culminante de Hamilton fue su uso de la forma general del principio de acción estacionaria de Hamilton\(S\), ecuación\((9.1.2)\), para derivar tanto la mecánica lagrangiana como la mecánica hamiltoniana. Considere la acción\( S_{A}\) para la ruta extrema de un sistema en el espacio de configuración, es decir, a lo largo de la ruta\(A\) para\(q_{j}(t_{i})\) las\(j=1,2,\dots ,n\) coordenadas en el tiempo inicial\( t_{i}\) hasta\(q_{j}(t_{f})\) en un momento final\(t_{f}\) como se muestra en la Figura\(\PageIndex{1}\).
Entonces la acción\(S_{A}\) viene dada por
\[S_{A}=\int_{t_{i}}^{t_{f}}L(\mathbf{q}(t)\mathbf{, \dot{q}}(t)\mathbf{,}t)dt \label{9.3}\]
Como se usa en el capítulo,\(5.2,\) una familia de caminos vecinos se define agregando una fracción infinitossimal\(\epsilon\) de una función vecina continua y de buen comportamiento\(\eta _{j}\) donde\(\epsilon =0\) para el camino extremo. Es decir,
\[q_{j}(t,\epsilon )=q_{j}(t,0)+\epsilon \eta _{j}(t)\label{9.4}\]
En contraste con el caso variacional discutido al derivar la mecánica lagrangiana, la trayectoria variacional utilizada aquí no asume que las funciones\(\eta _{i}(t)\) desaparecen en los puntos finales. Supongamos que el camino vecino\(B\) tiene una acción\(S_{B}\) donde
\[S_{B}=\int_{t_{i}+\Delta t}^{t_{f}+\Delta t}L(\mathbf{q}(t)\mathbf{+\delta q} (t)\mathbf{,\dot{q}}(t)\mathbf{+\delta \dot{q}}(t))dt\label{9.5}\]
Expandiendo el integrando de\(S_{B}\) en la Ecuación\ ref {9.5} da que, con relación a la ruta extrema\(A\), el cambio incremental en la acción es
\[\delta S=S_{B}-S_{A}=\int_{t_{i}}^{t_{f}}\sum_{j}\left( \frac{\partial L}{ \partial q_{j}}\delta q_{j}+\frac{\partial L}{\partial \dot{q}_{j}}\delta \dot{q}_{j}\right) dt+\left[ L\Delta t\right] _{t_{i}}^{t_{f}}\label{9.6}\]
El segundo término en la integral se puede integrar por partes ya que\(\delta \dot{q}_{j}=d\left( \frac{\delta q_{j}}{dt}\right)\) conduce a
\[\delta S=\int_{t_{i}}^{t_{f}}\sum_{j}\left( \frac{\partial L}{\partial q_{j}} -\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_{j}}\right) \delta q_{j}dt+ \left[ \sum_{j}\frac{\partial L}{\partial \dot{q}_{j}}\delta q_{j}+L\Delta t \right] _{t_{i}}^{t_{f}}\label{9.7}\]
Tenga en cuenta que la Ecuación\ ref {9.7} incluye contribuciones de toda la trayectoria de la integral así como las variaciones en los extremos de la curva y los\(\Delta t\) términos. La ecuación\ ref {9.7} conduce a los siguientes dos principios pioneros de menor acción en la mecánica variacional que fueron desarrollados por Hamilton.
Principio de acción estacionaria en mecánica lagrangiana
La derivación de la mecánica lagrangiana en el capítulo\(6\) se basó en el camino extremo para caminos vecinos entre dos ubicaciones dadas\(\mathbf{q(} t_{i})\) y\(\mathbf{q}(t_{f})\) que el sistema ocupa en los tiempos inicial y final\(t_{i}\) y\(t_{f}\) respectivamente. Para este caso especial, donde los puntos finales no varían, es decir, cuándo\(\delta q_{i}(t_{i})=\delta q_{i}(t_{f})=0\), y\(\Delta t_{i}=\Delta t_{f}=0\), entonces la menor acción\( \delta S\) para la trayectoria estacionaria\ ref {9.8} se reduce a
\[\delta S=\int_{t_{i}}^{t_{f}}\sum_{j}\left( \frac{\partial L}{\partial q_{j}} -\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_{j}}\right) \delta q_{j}dt=0\label{9.8}\]
Para las coordenadas generalizadas independientes\(\delta q_{j}\), el integrando entre paréntesis se desvanece dando lugar a las ecuaciones de Euler-Lagrange. Por el contrario, si se satisfacen las ecuaciones de Euler-Lagrange en\ ref {9.8}, entonces, es\(\delta S=0,\) decir, la trayectoria es estacionaria. Esto lleva a la afirmación de que la ruta en el espacio de configuración entre dos configuraciones\(\mathbf{q(} t_{i})\) y\(\mathbf{q}(t_{f})\) que el sistema ocupa a veces\( t_{i}\) y\(t_{f}\) respectivamente, es aquella para la que\(S\) se encuentra la acción estacionario. Esta es una declaración del Principio de Hamilton.
Principio de acción estacionaria en la mecánica hamiltoniana
Hamilton utilizó la variación general del camino de menor acción para derivar las ecuaciones básicas de la mecánica hamiltoniana. Para la trayectoria general, el término integral en la Ecuación\ ref {9.7} desaparece porque las ecuaciones de Euler-Lagrange son obedecidas para la trayectoria estacionaria. Así, las únicas contribuciones restantes distintas de cero se deben a los términos del punto final, los cuales pueden escribirse definiendo la variación total de cada punto final a ser
\[\Delta q_{j}=\delta q_{j}+\dot{q}_{j}\Delta t\label{9.9}\]
donde\(\delta q_{i}\) y\(\dot{q}_{i}\) se evalúan en\(t_{i}\) y\(t_{f}\). Entonces la Ecuación\ ref {9.7} se reduce a
\[\delta S=\left[ \sum_{j}\frac{\partial L}{\partial \dot{q}_{j}}\delta q_{j}+L\Delta t\right] _{t_{i}}^{t_{f}}=\left[ \sum_{j}\frac{\partial L}{ \partial \dot{q}_{j}}\Delta q_{j}+\left( -\sum_{j}\frac{\partial L}{\partial \dot{q}_{j}}\dot{q}_{j}+L\right) \Delta t\right] _{t_{i}}^{t_{f}}\label{9.10}\]
Desde el impulso generalizado\(p_{j}=\frac{\partial L}{\partial \dot{q}_{j}}\), entonces la Ecuación\ ref {9.10} puede expresarse en términos del impulso hamiltoniano y generalizado como
\[\label{9.11} \delta S = \left[ \sum_{j}p_{j}\Delta q_{j}-H\Delta t \right]_{t_{i}}^{t_{f}} = \left[ \mathbf{p\cdot }\Delta \mathbf{q}-H\Delta t\right]_{t_{i}}^{t_{f}} \]
\[ \frac{\partial S}{\partial q_{j}} = \frac{\partial L}{\partial \dot{q}_{j}} =p_{j} \label{9.12}\]
La ecuación\ ref {9.11} contiene el Principio de Acción Mínima de Hamilton. La ecuación\ ref {9.12} da una relación alternativa del impulso generalizado\(p_{j}\) que se expresa en términos de la acción funcional\(S\). Tenga en cuenta que las ecuaciones\ ref {9.11} y\ ref {9.12} se derivaron directamente sin invocar referencia al lagrangiano.
Integrando la acción\(\delta S\), Ecuación\ ref {9.10}, entre los puntos finales da la acción para que el camino entre\(t=t_{i}\) y\(t=t_{f}\), es decir,\( S(q_{j}(t_{i}),t_{1},q_{j}(t_{f}),t_{2})\) ser
\[S(q_{j}(t_{i}),t_{i},q_{j}(t_{f}),t_{f})=\int_{i}^{f}\left[ \mathbf{p\cdot \dot{q}}-H(\mathbf{q,p,}t)\right] dt\label{9.13}\]
La trayectoria estacionaria se obtiene utilizando el principio variacional
\[\delta S=\delta \int_{i}^{f}\left[ \mathbf{p\cdot \dot{q}}-H(\mathbf{q,p,}t) \right] dt=0\label{9.14}\]
El integrando,\(I=\left[ \mathbf{p\cdot \dot{q}}-H(\mathbf{q,p,}t)\right] ,\) en este principio modificado de Hamilton, se puede utilizar en las ecuaciones de\(n\) Euler-Lagrange\(j=1,2,3,\dots ,n\) para dar
\[\frac{d}{dt}\left( \frac{\partial I}{\partial \dot{q}_{j}}\right) -\frac{ \partial I}{\partial q_{j}}=\dot{p}_{j}+\frac{\partial H}{\partial q_{j}}=0\label{9.15}\]
Del mismo modo, las otras ecuaciones\(n\) de Euler-Lagrange dan
\[\frac{d}{dt}\left( \frac{\partial I}{\partial \dot{p}_{j}}\right) -\frac{ \partial I}{\partial p_{j}}=-\dot{q}_{j}+\frac{\partial H}{\partial p_{j}}=0\label{9.16}\]
Así, el principio de menor acción de Hamilton lleva a las ecuaciones de movimiento de Hamilton, es decir, las ecuaciones\ ref {9.15} y\ ref {9.16}.
El tiempo total derivado de la acción\(S\), que es una función de las coordenadas y el tiempo, es
\[\frac{dS}{dt}=\frac{\partial S}{\partial t}+\sum_{j}^{n}\frac{\partial S}{ \partial q_{j}}\dot{q}_{j}=\frac{\partial S}{\partial t}+\mathbf{p\cdot \dot{ q}}_{j}\label{9.17}\]
Pero la derivada de tiempo total de la ecuación\ ref {9.14} es igual
\[\frac{dS}{dt}=\mathbf{p\cdot \dot{q}}-H(\mathbf{q,p,}t)\label{9.18}\]
Combinando ecuaciones\ ref {9.17} y\ ref {9.18} da la ecuación de Hamilton-Jacobi que se discute en el capítulo\(15.4\). \[\frac{\partial S}{\partial t}+H(\mathbf{q,p,}t)=0\label{9.19}\]
En resumen, el principio de menor acción de Hamilton lleva directamente a las ecuaciones de movimiento de Hamilton\ ref {9.15},\ ref {9.16} más la Ecuación de Hamilton-Jacobi\ ref {9.19}. Tenga en cuenta que la discusión anterior ha derivado tanto el Principio de Hamilton\ ref {9.8}, como las ecuaciones de movimiento de Hamilton\ ref {9.15},\ ref {9.16}, directamente del concepto variacional de Hamilton de acción estacionaria,\( S\), sin invocar explícitamente al lagrangiano.
Acción abreviada
El principio de acción de Hamilton determina completamente el camino del movimiento y la posición en el camino en función del tiempo. Si el lagrangiano y el hamiltoniano son independientes del tiempo, es decir, conservadores, entonces\(H=E\) y Ecuación\ ref {9.13} es igual
\[S(q_{j}(t_{1}),t_{1},q_{j}(t_{2}),t_{2})=\int_{i}^{f}\left[ \mathbf{p\cdot \dot{q}}-E\right] dt=\int_{i}^{f}\mathbf{p\cdot }\delta \mathbf{q} -E(t_{f}-t_{i})\label{9.20}\]
El\(\int_{1}^{2}\mathbf{p\cdot \delta \dot{q}}\) término en la ecuación\ ref {9.20}, se llama la acción abreviada que se define como
\[S_{0}\equiv \int_{i}^{f}\mathbf{p\cdot }\delta \mathbf{\dot{q}} dt=\int_{i}^{f}\mathbf{p\cdot }\delta \mathbf{q}\label{9.21}\]
La acción abreviada puede simplificarse asumiendo el uso del estándar Lagrangiano\(L=T-U\) con un potencial independiente de la velocidad\(U\), luego la ecuación\( 8.1.4\) da. \[S_{0}\equiv \int_{t_{i}}^{t_{f}}\sum_{j}^{n}p_{j}\dot{q}_{j}dt= \int_{t_{i}}^{t_{f}}\left( L+H\right) dt=\int_{t_{i}}^{t_{f}}2Tdt=\int_{t_{i}}^{t_{f}}\mathbf{p\cdot }\delta \mathbf{q}\label{9.22}\]
La acción abreviada prevé el uso de una forma simplificada del principio de menor acción que se basa en la energía cinética, y no en la energía potencial. Para los sistemas conservadores determina la trayectoria del movimiento, pero no la dependencia temporal del movimiento. Considera movimientos virtuales donde el camino satisface la conservación de energía, y donde los puntos finales se mantienen fijos, es decir,\(\delta q_{i}=0,\) pero permiten una variación\(\delta t\) en el tiempo final. Luego usando la ecuación de Hamilton-Jacobi,\ ref {9.19}
\[\delta S=-H\delta t=-E\delta t\label{9.23}\]
Sin embargo, la ecuación\ ref {9.21} da que
\[\delta S=\delta S_{0}-E\delta t\label{9.24}\]
Por lo tanto
\[\delta S_{0}=0\label{9.25}\]
Es decir, la acción abreviada tiene un mínimo con respecto a todos los caminos que satisfacen la conservación de la energía que puede escribirse como
\[\delta S_{0}=\delta \int_{t_{i}}^{t_{f}}2Tdt=0\label{9.26}\]
La ecuación\ ref {9.26} se llama el principio de menor acción de Maupertuis que propuso en\(1744\) base al Principio de Fermat en óptica. El crédito por la formulación de la menor acción comúnmente se le da a Maupertuis; sin embargo, el principio Maupertuis es similar al uso de la menor acción aplicada al “vis viva”, como lo propuso Leibniz cuatro décadas antes. Maupertuis utilizó argumentos teleológicos, más que rigor científico, debido a sus limitadas capacidades matemáticas. En\(1744\) Euler aportó un argumento científicamente riguroso, presentado anteriormente, que subyace al principio Maupertuis. Euler derivó la relación variacional correcta para que la acción abreviada sea\[\delta S_{0}=\int_{t_{i}}^{t_{f}}\sum_{j}^{n}p_{j}\delta q_{j}=0\label{9.27}\]
El uso de Hamilton del principio de menor acción para derivar la mecánica lagrangiana y hamiltoniana es un logro notable. Subyace tanto a la mecánica lagrangiana como a la hamiltoniana y confirmó la conjetura de Maupertuis.
Principio de Hamilton aplicado usando condiciones de límite iniciales
Galera [Gal13] identificó una sutil inconsistencia en las aplicaciones del Principio de Acción Estacionaria de Hamilton tanto a la mecánica lagrangiana como a la hamiltoniana. La inconsistencia implica el hecho de que el Principio de Hamilton se define como la integral de acción entre el tiempo inicial\(t_{i}\) y el tiempo final\(t_{f}\) como condiciones límite, es decir, se supone que es simétrico en el tiempo. Sin embargo, la mayoría de las aplicaciones en la mecánica lagrangiana y hamiltoniana asumen que la integral de acción se evalúa con base en los valores iniciales como las condiciones límite, en lugar de los tiempos inicial\(t_{i}\) y final\(\ t_{f}\). Es decir, las aplicaciones típicas requieren el uso de una versión asimétrica en el tiempo del principio de Hamilton. Galley propuso un marco para transformar el Principio de Hamilton a una forma asimétrica en el tiempo con el fin de manejar problemas donde las condiciones límite se basan en usar solo los valores iniciales en el momento inicial\(t_{i}\), en lugar de los tiempos iniciales más finales\((t_{i},t_{f})\) que se asume en el tiempo- definición simétrica de la acción en el Principio de Hamilton.
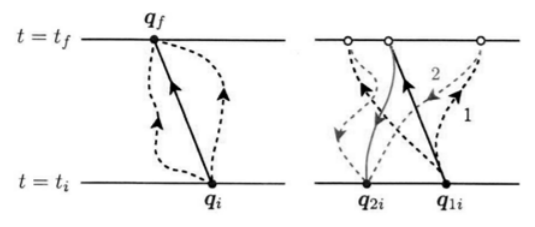
A continuación se describe el marco propuesto por Galley para transformar el Principio de Hamilton a una forma asimétrica en el tiempo. Dejar\(\mathbf{q}\) y\( \mathbf{\dot{q}}\) designar conjuntos de coordenadas\(N\) generalizadas, más sus velocidades, donde\(\mathbf{q}\) y\(\mathbf{\dot{q}}\) son las variables fundamentales asumidas en la definición del Lagrangiano utilizada por el Principio de Hamilton. Como se ilustra esquemáticamente en la Figura\(\PageIndex{2}\), Galera propuso duplicar el número de grados de libertad para el sistema considerado, es decir, dejar\(\mathbf{q\rightarrow }\left( \mathbf{q}_{1}\mathbf{,q}_{2}\right)\) y\(\mathbf{\dot{q}\rightarrow }\left( \mathbf{\dot{q}}_{1}\mathbf{,\dot{q}} _{2}\right)\). Además define dos caminos variacionales idénticos\(1\) y\(2,\) donde path\(2\) es el tiempo inverso de path\(1\). Es decir, el camino\(1\) comienza en el tiempo inicial\(t_{i}\), y termina en\(t_{f}\), mientras que el camino\(2\) comienza en\(t_{f}\) y termina en\(t_{i}\). Es decir, asume eso\( \mathbf{q}\) y\(\mathbf{\dot{q}}\) especifica los dos caminos en el espacio de los grados duplicados de libertad que son idénticos, y que se cruzan en el momento final\(t_{f}\). Las flechas mostradas en las trayectorias de la Figura\(\PageIndex{2}\) designan la dirección asumida de la integración de tiempo a lo largo de estas trayectorias.
Para el sistema duplicado de grados de libertad, la acción total para la suma de los dos caminos viene dada por la integral de tiempo de las variables duplicadas,\(S( \mathbf{q}_{1},\mathbf{q}_{2})\) que puede escribirse como
\[S\left( \mathbf{q}_{1},\mathbf{q}_{2}\right) =\int_{t_{i}}^{t_{f}}L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,}t\right) dt+\int_{t_{f}}^{t_{i}}L\left( \mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right) dt=\int_{t_{i}}^{t_{f}}\left[ L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1} \mathbf{,}t\right) dt-L\left( \mathbf{q}_{2},\mathbf{\dot{q}}_{2}\mathbf{,} t\right) \right] dt\label{9.28}\]
La relación anterior supone que las variables duplicadas\(\left( \mathbf{q}_{1}, \mathbf{\dot{q}}_{1}\right)\) y\(\left( \mathbf{q}_{2},\mathbf{\dot{q}} _{2}\right)\) están desacopladas entre sí. De manera más general se puede suponer que los dos conjuntos de variables están acoplados por alguna función arbitraria\( K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1},\mathbf{q}_{2},\mathbf{\dot{q}} _{2},t\right)\). Entonces la acción se puede escribir como
\[S\left( \mathbf{q}_{1},\mathbf{q}_{2}\right) =\int_{t_{i}}^{t_{f}}\left[ L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,t}\right) dt-L\left( \mathbf{q}_{2},\mathbf{\dot{q}}_{2}\mathbf{,t}\right) +K\left( \mathbf{q} _{1},\mathbf{\dot{q}}_{1},\mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right) \right] dt\label{9.29}\]
El Lagrangiano efectivo para este sistema duplicado entonces se puede definir como
\[\Lambda \left( \mathbf{q}_{1},\mathbf{q}_{2},\mathbf{\dot{q}}_{1},\mathbf{ \dot{q}}_{2},t\right) \equiv \left[ L\left( \mathbf{q}_{1},\mathbf{\dot{q}} _{1}\mathbf{,}t\right) dt-L\left( \mathbf{q}_{2},\mathbf{\dot{q}}_{2}\mathbf{ ,}t\right) +K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1},\mathbf{q}_{2}, \mathbf{\dot{q}}_{2},t\right) \right]\label{9.30}\]
y la acción puede escribirse como\[S\left( \mathbf{q}_{1},\mathbf{q}_{2}\right) =\int_{t_{i}}^{t_{f}}\Lambda \left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1},\mathbf{q}_{2},\mathbf{\dot{q}} _{2},t\right) dt\label{9.31}\]
El término de acoplamiento\(K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1},\mathbf{q} _{2},\mathbf{\dot{q}}_{2},t\right)\) para el sistema doble de grados de libertad debe satisfacer las siguientes dos propiedades.
(a) Si se puede expresar como la diferencia de dos potenciales escalares\( \Delta U\left( \mathbf{q}_{1},\mathbf{q}_{2}\right) =U\left( \mathbf{q} _{1}\right) -U\left( \mathbf{q}_{2}\right)\), entonces puede ser absorbido en el término potencial para cada una de las variables duplicadas en el lagrangiano. Esto implica eso\(K=0,\) y no hay razón para duplicar el número de grados de libertad porque el sistema es conservador. Así se\(K\) describen las fuerzas generalizadas que no son derivables de la energía potencial, es decir, conservadoras.
b) Una segunda propiedad del término de acoplamiento\(K\left( \mathbf{q}_{1},\mathbf{ \dot{q}}_{1},\mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right)\) es que debe ser antisimétrico bajo intercambio de las etiquetas arbitrarias\(1\leftrightarrow 2\). Es decir,
\[K\left( \mathbf{q}_{2},\mathbf{\dot{q}}_{2},\mathbf{q}_{1},\mathbf{\dot{q}} _{1},t\right) =-K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1},\mathbf{q}_{2}, \mathbf{\dot{q}}_{2},t\right)\label{9.32}\]
Por lo tanto, la función antisimétrica se\(K\left( \mathbf{q}_{1},\mathbf{\dot{q}} _{1},\mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right)\) desvanece cuando\(\mathbf{q} _{2}=\mathbf{q}_{1}\).
La condición variacional requiere que la acción\(S\left( \mathbf{q}_{1}, \mathbf{q}_{2}\right)\) tenga un punto estacionario bien definido para el sistema duplicado. Esto se logra parametrizando ambas trayectorias de coordenadas como
\[\mathbf{q}_{1,2}(t,\epsilon )=\mathbf{q}_{1,2}(t,0)+\epsilon \eta _{1,2}(t)\label{9.33}\]
donde\(\mathbf{q}_{1,2}(t,0)\) están las coordenadas para las cuales la acción es estacionaria,\(\epsilon \ll 1.\) y donde\(\eta _{1,2}(t)\) son funciones arbitrarias del tiempo que denotan desplazamientos virtuales de los caminos. El sistema duplicado tiene dos caminos independientes que conectan las dos condiciones de límite iniciales en\(t_{i}\), y requiere que estos caminos se crucen en\(t_{f}\). El sistema variacional para los dos caminos que se intersectan requiere especificar cuatro condiciones, dos por trayecto. Dos de las cuatro condiciones se determinan requiriendo que en\(t_{i}\) el límite inicial las condiciones satisfagan eso\( \eta _{1,2}(t_{i})=0\). Las dos condiciones restantes se derivan al exigir que la variación de la acción\(S\left( \mathbf{q}_{1},\mathbf{q} _{2}\right)\) satisfaga
\[\left[ \frac{dS}{d\epsilon }\right] _{\epsilon =0}=0=\int_{t_{i}}^{t_{f}}dt\left\{ \eta _{1}\left[ \frac{\partial \Lambda }{ \partial q_{1}}-\frac{d\pi _{1}}{dt}\right] _{\epsilon =0}-\eta _{2}\left[ \frac{\partial \Lambda }{\partial q_{2}}-\frac{d\pi _{2}}{dt}\right] _{\epsilon =0}\right\} +\left[ \eta _{1}\pi _{1}-\eta _{2}\pi _{2}\right] _{t=t_{f}}\label{9.34}\]
Los momentos canónicos\(\pi _{1,2}\) conjugados a las coordenadas duplicadas se\( \mathbf{q}_{1,2}\) definen usando el lagrangiano no conservador\(\Lambda\) para ser
\[\pi _{1}^{I}\left( \mathbf{q}_{1,2},\mathbf{\dot{q}}_{1,2}\right) \equiv \frac{\partial \Lambda }{\partial \dot{q}_{1}^{I}(t)}=\frac{\partial L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,}t\right) }{\partial \dot{q} _{1}^{I}(t)}+\frac{\partial K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}, \mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right) }{\partial \dot{q}_{1}^{I}(t)}\label{9.35}\]
donde el superíndice\(I\) designa la solución con base en las condiciones iniciales. Tenga en cuenta que el momento conjugado\(p_{1}^{I}=\frac{\partial L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,}t\right) }{\partial \dot{q}_{1}^{I}(t)}\) mientras que el\(\frac{\partial K\left( \mathbf{q}_{1}, \mathbf{\dot{q}}_{1},\mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right) }{\partial \dot{q}_{1}^{I}(t)}\) término es parte del impulso total debido a la interacción no conservadora. De igual manera el impulso para el segundo camino es\[\pi _{2}^{I}\left( \mathbf{q}_{1,2},\mathbf{\dot{q}}_{1,2}\right) \equiv \frac{\partial \Lambda }{\partial \dot{q}_{2}^{I}(t)}=\frac{\partial L\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,}t\right) }{\partial \dot{q} _{2}^{I}(t)}+\frac{\partial K\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}, \mathbf{q}_{2},\mathbf{\dot{q}}_{2},t\right) }{\partial \dot{q}_{2}^{I}(t)}\label{9.36}\]
El último término en la Ecuación\ ref {9.34}, es decir, el término\(\left[ \eta _{1}\pi _{1}-\eta _{2}\pi _{2}\right] _{t=t_{f}}\) resulta de la integración por partes, que desaparecerá si
\[\eta _{1}^{I}(t_{f})\pi _{1}^{I}(t_{f})=\eta _{2}^{I}(t_{f})\pi _{2}^{I}(t_{f})\label{9.37}\]
La condición de igualdad en la intersección de los dos caminos en\(t_{f}\) requiere que
\[\eta _{1}^{I}(t_{f})=\eta _{2}^{I}(t_{f})\label{9.38}\]
Por lo tanto, las ecuaciones\ ref {9.37} y\ ref {9.38} implican que
\[\pi _{1}^{I}(t_{f})=\pi _{2}^{I}(t_{f})\label{9.39}\]
Por lo tanto, las ecuaciones\ ref {9.38} y\ ref {9.39} constituyen la condición de igualdad que debe cumplirse cuando los dos caminos se cruzan en\(t_{f}\). La condición de igualdad asegura que el término límite para la integración por partes en la Ecuación\ ref {9.34} desaparezca para variaciones arbitrarias siempre que los dos caminos no especificados coincidan en el momento final\(t_{f}\). De igual manera los momentos conjugados\(\pi _{1}^{I}(t_{f}),\pi _{2}^{I}(t_{f})\) deben estar de acuerdo, pero por lo demás no se especifican. En consecuencia, la condición de igualdad asegura que el principio variacional sea congruente con el estado final al\(t_{f}\) no ser especificado. Es decir, las ecuaciones de movimiento solo se especifican por las condiciones de límite iniciales de la acción asimétrica en el tiempo para el sistema duplicado.
Se proporciona más conocimiento de la física mediante el uso de una parametrización más conveniente de las coordenadas en términos de su promedio y diferencia. Es decir, vamos
\[q_{+}^{I}\equiv \frac{q_{1}^{I}+q_{2}^{I}}{2}\hspace{0.85in}q_{-}^{I}\equiv q_{1}^{I}-q_{2}^{I}\label{9.40}\]
Entonces el límite físico es
\[q_{+}^{I}\rightarrow q^{I}\hspace{0.85in}q_{-}^{I}\rightarrow 0\label{9.41}\]
Es decir, la historia promedio es la historia física relevante, mientras que la coordenada de diferencia simplemente desaparece. Para estas coordenadas, el lagrangiano no conservador es\(\Lambda \left( \mathbf{q}_{+},\mathbf{q}_{-}, \mathbf{\dot{q}}_{+},\mathbf{\dot{q}}_{-},t\right)\) y las condiciones de igualdad se reducen a
\[\begin{align} \pi _{-}(t_{f}) &=&0 \label{9.42}\\ \eta _{-}(t_{f}) &=&0 \label{9.43} \end{align}\]
lo que implica que las\(\left( +\right)\) cantidades medias físicamente relevantes no se especifican\(t_{f}\) en el momento final para tener un principio variacional bien definido.
Los momenta canónicos son dados por
\[\begin{align} \label{9.44}\pi _{+}^{I} &=&\frac{\pi _{1}^{I}+\pi _{2}^{I}}{2}=\frac{\partial \Lambda }{ \partial \dot{q}_{-}^{I}} \\ \pi _{-}^{I} &=&\pi _{1}^{I}-\pi _{2}^{I}=\frac{\partial \Lambda }{\partial \dot{q}_{+}^{I}}\label{9.45} \end{align}\]
Las ecuaciones de movimiento se pueden escribir como.
\[\frac{d}{dt}\frac{\partial \Lambda }{\partial \dot{q}_{\pm }^{I}}=\frac{ \partial \Lambda }{\partial q_{\pm }^{I}}\label{9.46}\]
La ecuación\ ref {9.46} es idéntica a cero para el\(+\) subíndice, mientras que, en el límite físico (PL), el subíndice negativo da que
\[\left[ \frac{d}{dt}\frac{\partial \Lambda }{\partial \dot{q}_{-}^{I}}-\frac{ \partial \Lambda }{\partial q_{-}^{I}}\right] _{PL}=0\label{9.47}\]
Sustituir por el lagrangiano\(\Lambda\) da que
\[\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_{-}^{I}}-\frac{\partial L}{ \partial q_{-}^{I}}=\left[ \frac{\partial K}{\partial q_{-}^{I}}-\frac{d}{dt} \frac{\partial K}{\partial \dot{q}_{-}^{I}}\right] _{PL}\equiv Q^{I}\left( \mathbf{q}_{1},\mathbf{\dot{q}}_{1}\mathbf{,}t\right)\label{9.48}\]
donde\(Q^{I}\) es una fuerza no conservadora generalizada derivada de\(K\).
Tenga en cuenta que la Ecuación\ ref {9.46} puede derivarse igualmente bien tomando la derivada funcional directa con respecto a\(q_{-}^{I}(t)\), es decir,\[0=\left[ \frac{\delta S}{\delta q_{-}^{I}(t)}\right] _{PL}\label{9.49}\]
El formalismo asimétrico en el tiempo anterior aplica el principio de acción de Hamilton a sistemas que involucran condiciones de límite iniciales, mientras que el segundo camino corresponde a las condiciones límite finales. Este marco, propuesto recientemente por Galley, proporciona un avance notable para el manejo de la acción no conservadora en la mecánica lagrangiana y hamiltoniana. 2 Este formalismo incorpora directamente el principio variacional para las condiciones límite iniciales y las dinámicas causales que generalmente se requieren para aplicaciones de la mecánica lagrangiana y hamiltoniana. Actualmente, existe una explotación limitada de este nuevo formalismo porque no ha habido tiempo suficiente para que se dé a conocer, para el pleno reconocimiento de su importancia, y para el desarrollo y publicación de aplicaciones. Capítulo\(10\) discute una aplicación de este formalismo a sistemas no conservadores en la mecánica clásica.
2 Este tema va más allá del alcance previsto de este libro. Se recomienda que el lector se refiera al trabajo de Galley, Tsang y Stein [Gal13, Gal14] para mayor discusión más ejemplos de aplicación de este formalismo a sistemas no conservadores en mecánica clásica, radiación electromagnética, circuitos RLC, dinámica de fluidos y teoría de campo.