
12.11: Libre Movimiento en la Tierra
- Page ID
- 126944
El cálculo de trayectorias para los objetos a medida que se mueven cerca de la superficie de la tierra es frecuentemente requerido para muchas aplicaciones. Dichos cálculos requieren la inclusión de la fuerza no inercial de Coriolis.
En el marco de referencia fijado a la superficie terrestre, suponiendo que se pueda descuidar la resistencia al aire y otras fuerzas, entonces la aceleración es igual
\[\mathbf{a}^{\prime} = \mathbf{g}_{eff} − 2\boldsymbol{\omega} \times \mathbf{v}^{\prime} \label{12.58}\]
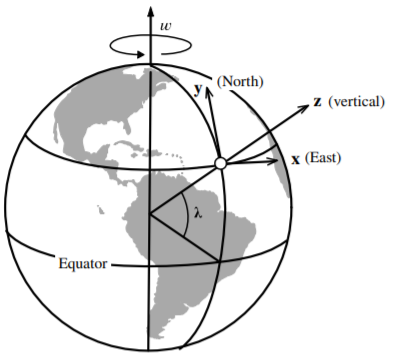
Descuidar el término de corrección centrífuga ya que es muy pequeño, es decir, let\(\mathbf{g}_{eff} = \mathbf{g}\). Usando el eje de coordenadas que se muestra en la Figura\(\PageIndex{1}\), los vectores de marco de superficie tienen componentes
\[\boldsymbol{\omega} = 0\widehat{\mathbf{i}^{\prime}} + \omega \cos \lambda \widehat{\mathbf{j}^{\prime}} + \omega \sin \lambda \widehat{\mathbf{k}^{\prime}} \]
y
\[\mathbf{g}_{eff} = -g\widehat{\mathbf{k}^{\prime}}\]
Así el término Coriolis es
\[\begin{align*} 2\boldsymbol{\omega} \times \mathbf{v}^{\prime} &= 2 \begin{vmatrix} \widehat{\mathbf{i}^{\prime}} & \widehat{\mathbf{j}^{\prime}} & \widehat{\mathbf{k}^{\prime}} \\ 0 & \omega \cos \lambda & \omega \sin \lambda \\ \dot{x}^{\prime} & \dot{y}^{\prime} & \dot{z}^{\prime} \end{vmatrix} \\[4pt] &= 2 \left[ \left( \omega \dot{z}^{\prime} \cos \lambda − \omega \dot{y}^{\prime} \sin \lambda \right) \widehat{\mathbf{i}^{\prime}} + \left( \omega \dot{x}^{\prime} \sin \lambda \right) \widehat{\mathbf{j}^{\prime}} − \left( \omega \dot{x}^{\prime} \cos \lambda \right) \widehat{\mathbf{k}^{\prime}}\right] \end{align*}\]
Por lo tanto, las ecuaciones de movimiento son
\[m \mathbf{\ddot{r}}^{\prime} = −mg\widehat{\mathbf{k}^{\prime}} −2m[\widehat{\mathbf{i}^{\prime}} (\dot{z}^{\prime} \omega \cos \lambda − \dot{y}^{\prime} \omega \sin \lambda ) + \widehat{\mathbf{j}^{\prime}} \dot{x}^{\prime} \omega \sin \lambda − \widehat{\mathbf{k}^{\prime}} \dot{x}^{\prime} \omega \cos \lambda ] \]
Es decir, los componentes de esta ecuación de movimiento son
\[\begin{align*} \ddot{x}^{\prime} &= −2\omega (\dot{z}^{\prime} \cos \lambda − \dot{y}^{\prime} \sin \lambda ) \\[4pt] \ddot{y}^{\prime} &= −2\omega \dot{x}^{\prime} \sin \lambda \notag\\[4pt] \ddot{z}^{\prime} &= −g + 2\omega \dot{x}^{\prime} \cos \lambda \end{align*}\]
La integración de estas ecuaciones diferenciales da
\[\begin{align*} \dot{x}^{\prime} &= −2\omega (z^{\prime} \cos \lambda − y^{\prime} \sin \lambda ) + \dot{x}^{\prime}_0 \\[4pt] \dot{y}^{\prime} &= −2\omega x^{\prime} \sin \lambda + \dot{y}^{\prime}_0 \\[4pt] \dot{z}^{\prime} &= −gt + 2\omega x^{\prime} \cos \lambda + \dot{z}^{\prime}_0 \end{align*}\]
donde\(\dot{x}^{\prime}_0, \dot{y}^{\prime}_0, \dot{z}^{\prime}_0\) están las velocidades iniciales. Sustituir las relaciones de velocidad anteriores en la ecuación de movimiento para\(\ddot{x}\) da
\[\ddot{x}^{\prime} = 2\omega gt \cos \lambda − 2\omega (\dot{z}^{\prime}_0 \cos \lambda − \dot{y}^{\prime}_0 \sin \lambda ) − 4\omega^2 x^{\prime} \]
El último término\(4\omega^2x\) es pequeño y se puede descuidar dando lugar a una simple ecuación diferencial de segundo orden desacoplada en\(x\). Integrando esto dos veces suponiendo que\(x^{\prime}_0 = y^{\prime}_0 = z^{\prime}_0 = 0\), más el hecho de que\(2\omega gt \cos \lambda\) y\(2\omega (\dot{z}^{\prime}_0 \cos \lambda − \dot{y}^{\prime}_0 \sin \lambda )\) sean constantes, da
\[x^{\prime} = \frac{1}{3} \omega gt^3 \cos \lambda − \omega t^2 (\dot{z}^{\prime}_0 \cos \lambda − \dot{y}^{\prime}_0 \sin \lambda ) + \dot{x}^{\prime}_0 t \]
Del mismo modo,
\[\begin{align*} y^{\prime} &= ( \dot{y}^{\prime}_0 t − \omega \dot{x}^{\prime}_0 t^2 \sin \lambda ) \\[4pt] z^{\prime} &= −\frac{1}{2} gt^2 + \dot{z}^{\prime}_0 t + \omega \dot{x}^{\prime}_0 t^2 \cos \lambda \end{align*}\]
Considerar los siguientes casos especiales;
Ejemplo\(\PageIndex{1}\): Free fall from rest
Supongamos que un objeto cae una altura a\(h\) partir del descanso en\(t = 0\),\(x = 0\),\(y = 0\),\(z = h\). Entonces
\[x^{\prime} = \frac{1}{3} \omega gt^3 \cos \lambda \notag\]
\[y^{\prime} = 0 \notag\]
\[z^{\prime} = h − \frac{1}{2} gt^2 \notag\]
Sustituyendo por\(t\) da
\[x^{\prime} = \frac{1}{3} \omega \cos \lambda \sqrt{\frac{8h^3}{g}} \notag\]
Así, el objeto se desplaza hacia el este como consecuencia de la rotación de la tierra. Obsérvese que en relación con el marco fijo es obvio que la velocidad angular del cuerpo debe aumentar a medida que cae para compensar la distancia reducida del eje de rotación con el fin de asegurar que se conserve el momento angular.
Ejemplo\(\PageIndex{2}\): Projectile fired vertically upwards
Un proyectil disparado hacia arriba con velocidades iniciales\(\dot{x}^{\prime}_0 = \dot{y}^{\prime}_0 = 0\) y\(\dot{z}^{\prime}_0 = v_0\) conduce a las relaciones
\[x^{\prime} = \frac{1}{3} \omega gt^3 \cos \lambda − \omega t^2 v_0 \cos \lambda \notag\]
\[y^{\prime} = 0\notag\]
\[z^{\prime} = −\frac{1}{2} gt^2 + v_0t\notag\]
Resolviendo para\(t\) cuando\(z^{\prime} = 0\) da\(t = 0\), y\(t = \frac{2v_0}{g}\). También dado que la altura máxima\(h\) que alcanza el proyectil está relacionada por
\[v_0 = \sqrt{2gh}\notag\]
entonces la deflexión final es
\[x^{\prime} = −\frac{4}{3} \omega \cos \lambda \sqrt{\frac{8h^3}{g}} \notag\]
Así el cuerpo se desplaza hacia el oeste.
Ejemplo\(\PageIndex{3}\): Motion parallel to Earth's surface
Para el movimiento en el\(x^{\prime} −y^{\prime}\) plano horizontal la deflexión es siempre a la derecha en el hemisferio norte de la Tierra ya que la componente vertical de\(\omega\) es hacia arriba y así\(−2 \overrightarrow{\boldsymbol{\omega}} \times \overrightarrow{\mathbf{v}^{\prime}}\) apunta hacia la derecha. En el hemisferio sur la componente vertical de\(\omega\) es descendente y así\(−2 \overrightarrow{\boldsymbol{\omega}} \times \overrightarrow{\mathbf{v}^{\prime}}\) apunta a la izquierda. Esto también se muestra utilizando las relaciones anteriores para el caso de un proyectil disparado hacia arriba en dirección este con componentes\(\dot{x}^{\prime}_0, 0, \dot{z}^{\prime}_0\). Los desplazamientos resultantes son
\[x^{\prime} = \frac{1}{3} \omega gt^3 \cos \lambda − \omega t^2\dot{z}^{\prime}_0 \cos \lambda + \dot{x}^{\prime}_0 t \notag\]
Del mismo modo,
\[y^{\prime} = −\omega \dot{x}^{\prime}_0 t^2 \sin \lambda \notag\]
\[z^{\prime} = −\frac{1}{2} gt^2 + \dot{z}^{\prime}_0 t + \omega \dot{x}^{\prime}_0 t^2 \cos \lambda \notag\]
La trayectoria no es plana y, en el hemisferio norte, el proyectil deriva hacia la derecha, es decir, hacia el sur.
En la batalla del Río de la Plata, durante la Segunda Guerra Mundial, los artilleros de los cruceros ligeros británicos Exeter, Ajax y Aquiles encontraron que sus salvos apuntados con precisión contra el acorazado de bolsillo alemán Graf Spee estaban cayendo 100 yardas a la izquierda. Los diseñadores de los mecanismos de avistamiento de armas habían corregido el efecto Coriolis asumiendo que los barcos lucharían en latitudes cercanas a 50\(^{\circ}\) norte, no 50\(^{\circ}\) sur.