
12.10: Fuerza gravitacional efectiva cerca de la superficie de la Tierra
- Page ID
- 126969
Considera que se puede descuidar la aceleración traslacional del centro de la Tierra, y así se puede suponer que un conjunto de ejes no giratorios a través del centro de la Tierra es aproximadamente un marco inercial. Los efectos del movimiento de la Tierra alrededor del Sol, o el movimiento del Sistema Solar en nuestra Galaxia, son pequeños comparados con los efectos debidos a la rotación de la Tierra.
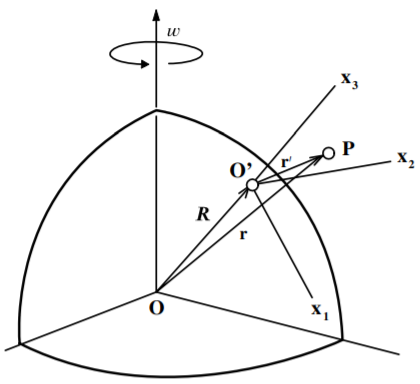
Considere un marco giratorio unido a la superficie de la tierra como se muestra en la Figura\(\PageIndex{1}\). El vector con respecto al centro de la Tierra se\(\mathbf{r}\) puede descomponer en un vector al origen del marco de referencia fijado a la superficie de la Tierra\(\mathbf{R}\), más el vector con respecto a este marco de referencia de superficie\(\mathbf{r}^{\prime}\).
\[\mathbf{r} = \mathbf{R} + \mathbf{r}^{\prime} \]
Si la fuerza externa se separa en el término gravitacional\(m\mathbf{g}\), más alguna otra fuerza física\(\mathbf{F}\), entonces la aceleración en el marco de referencia de superficie no inercial es
\[\mathbf{a}^{\prime} = \frac{\mathbf{F}}{m} +\mathbf{g}−(\mathbf{A} + 2\boldsymbol{\omega} \times \mathbf{v}^{\prime} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{r}^{\prime} ) + \boldsymbol{\dot{\omega}} \times \mathbf{r}^{\prime} ) \]
Pero
\[\mathbf{V} = \left(\frac{d\mathbf{R}}{dt}\right)_{fixed} = \left(\frac{d\mathbf{R}}{dt}\right)_{rotating} + \boldsymbol{\omega} \times \mathbf{R} = \boldsymbol{\omega} \times \mathbf{R} \]
ya que en el marco giratorio\(\left(\frac{d\mathbf{R}}{dt}\right)_{rotating} = 0\). También la aceleración
\[\mathbf{A} = \left(\frac{d\mathbf{V}}{dt}\right)_{fixed} = \left(\frac{d\mathbf{V}}{dt}\right)_{rotating} + \boldsymbol{\omega} \times \mathbf{V} = \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{R}) \]
ya que\(\left(\frac{d\mathbf{V}}{dt}\right)_{rotating} = 0\). Sustituyendo esto en la ecuación anterior da
\[\begin{aligned} \mathbf{a}^{\prime} & = & \frac{\mathbf{F}}{m} + \mathbf{g} − (2\boldsymbol{\omega} \times \mathbf{v}^{\prime} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times [\mathbf{r}^{\prime} + \mathbf{R}]) + \boldsymbol{\dot{\omega}} \times \mathbf{r}^{\prime} ) \\ & = & \frac{\mathbf{F}}{m} + \mathbf{g} − (2\boldsymbol{\omega} \times \mathbf{v}^{\prime} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{r}) + \boldsymbol{\dot{\omega}} \times \mathbf{r}^{\prime} ) \end{aligned}\]
donde\(\mathbf{r}\) es con respecto al centro de la Tierra. Esto es como se esperaba directamente de la ecuación\((12.6.8)\). Dado que la frecuencia angular de la tierra es una constante entonces\(\dot{\omega} \times \mathbf{r}^{\prime} = 0\). Así la aceleración puede escribirse como
\[\mathbf{a}^{\prime} = \frac{\mathbf{F}}{m} + [\mathbf{g} − \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{ r})] − 2\boldsymbol{\omega} \times \mathbf{v}^{\prime} \label{12.52}\]
El término entre corchetes combina la aceleración gravitacional más la aceleración centrífuga.
Una medida de la aceleración gravitacional de la Tierra mide realmente el término entre corchetes en la Ecuación\ ref {12.52}, es decir, una aceleración gravitacional efectiva donde
\[\mathbf{g}_{eff} = \mathbf{g} − \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{ r}) \]
cerca de la superficie de la tierra\(\mathbf{r} \approx \mathbf{R}\). La fuerza gravitacional efectiva no apunta hacia el centro de la Tierra como se muestra en la Figura\(\PageIndex{2}\). Una plomada apunta, o un objeto cae, en la dirección de\(\mathbf{g}_{eff}\). La forma de la tierra es tal que la superficie de la Tierra es perpendicular a\(\mathbf{g}_{eff}\). Esta es la razón por la que la tierra se distorsiona en un elipsoide oblato, es decir, se aplana en los polos.
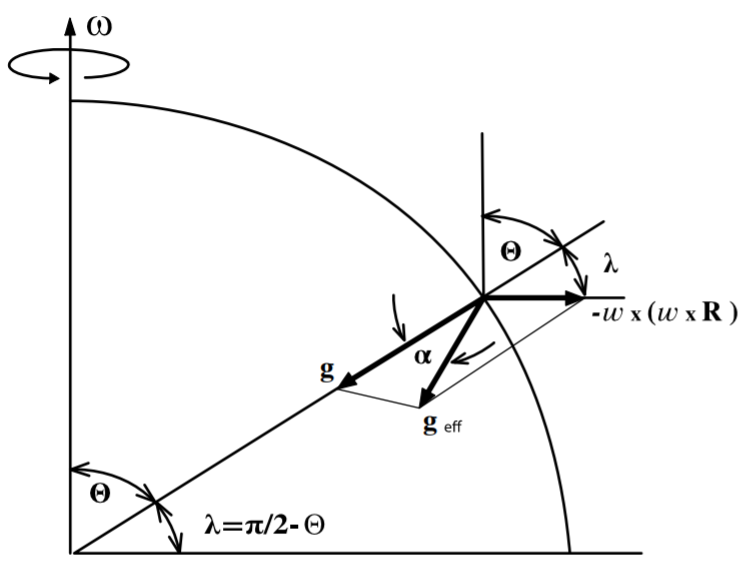
El ángulo\(\alpha\) entre\(\mathbf{g}_{eff}\) y la línea que apunta al centro de la tierra depende de la latitud\(\lambda = \frac{\pi}{2} −\theta\). Obsérvese que la colatitud\(\theta\) se toma como cero en el polo Norte mientras que la latitud\(\lambda\) se toma como cero en el ecuador. El ángulo se\(\alpha\) puede estimar asumiendo que\(r^{\prime} << R\), entonces el término centrífugo puede aproximarse por
\[|\boldsymbol{\omega} \times (\boldsymbol{\omega} \times \mathbf{ r})| \approx \omega^2 R \sin \theta = \omega^2 R \cos \lambda \]
Esto es bastante pequeño para la Tierra desde\(\omega = 0.73 \times 10^{−4}\)\(rads/s\) y\(R = 6371\)\(km\), lo que lleva a un término de corrección\(\omega^2 R \cos \lambda = 0.03 \cos \lambda\)\(m/s^2\). Desde
\[g^{horizontal}_{eff} = \omega^2 R \cos \lambda \sin \lambda \]
y
\[g^{vertical}_{eff} = g − \omega^2 R \cos^2 \lambda \]
Entonces el ángulo\(\alpha\) entre\(\mathbf{g}_{eff}\) y\(\mathbf{g}\) viene dado por
\[\alpha \simeq \tan \alpha = \frac{g^{horizontal}_{eff}}{g^{vertical}_{eff}} = \frac{\omega^2 R \cos \lambda \sin \lambda}{g − \omega^2 R \cos^2 \lambda} \]
Este tiene un valor máximo en el\(\lambda = 45^{\circ}\) que se encuentra\(\alpha = 0.0088^{\circ}\).