
12.13: Péndulo de Foucault
- Page ID
- 126962
Un ejemplo clásico de movimiento en marcos no inerciales es la rotación del péndulo de Foucault en la superficie de la tierra. El péndulo de Foucault es un péndulo esférico con una suspensión larga que oscila en el\(x-y\) plano con amplitud suficientemente pequeña para que la velocidad vertical\(\dot{z}\) sea insignificante.
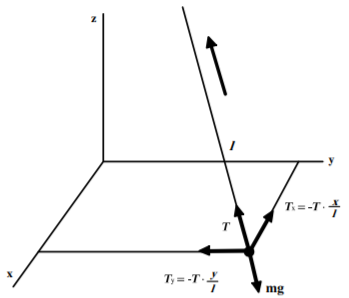
Supongamos que el péndulo es un péndulo simple de longitud\(l\) y masa\(m\) como se muestra en la Figura\(\PageIndex{1}\). La ecuación de movimiento viene dada por
\[\mathbf{\ddot{r}} = \mathbf{g} + \frac{\mathbf{T}}{m} − 2\boldsymbol{\Omega} \times \mathbf{\dot{r}} \]
donde\(\frac{T}{m}\) es la aceleración producida por la tensión en la suspensión del péndulo y el vector de rotación de la tierra es designado por\(\boldsymbol{\Omega}\) para evitar confusiones con la frecuencia de oscilación del péndulo\(\omega \). La aceleración gravitacional efectiva\(\mathbf{g}\) viene dada por
\[\mathbf{g} = \mathbf{g}_0 − \boldsymbol{\Omega} \times [\boldsymbol{\Omega} \times (\mathbf{r} + \mathbf{R})] \label{12.78}\]
es decir, el verdadero campo gravitacional\(\mathbf{g}_0\) corregido por la fuerza centrífuga.
Supongamos la aproximación de ángulo pequeño para el ángulo de deflexión del péndulo\(\beta\), entonces\(T_z = T \cos \beta \simeq T\) y\(T_z = mg\), así\(T \simeq mg\). Luego se ha mostrado en la Figura\(\PageIndex{1}\), los componentes horizontales de la fuerza restauradora son
\[T_z = −mg \frac{x}{l} \]
\[T_y = −mg \frac{y}{l} \]
Dado que\(\mathbf{g}\) es vertical, y descuidar términos que involucran\(\dot{z}\), luego evaluar el producto cruzado en la Ecuación\ ref {12.78} simplifica a
\[\ddot{x} = −g\frac{x}{l} + 2\dot{y}\Omega \cos \theta \label{12.81} \]
\[\ddot{y} = −g\frac{y}{l} + 2\dot{x}\Omega \cos \theta \label{12.82} \]
donde\(\theta\) esta la colatitud que se relaciona con la latitud\(\lambda\) por
\[\cos \theta = \sin \lambda \]
La frecuencia angular natural del péndulo simple es
\[\omega_0 = \sqrt{\frac{g}{l}}\]
mientras que el\(z\) componente de la velocidad angular de la tierra es
\[\Omega_z = \Omega \ cos \theta \]
Así, las ecuaciones\ ref {12.81} y\ ref {12.82} pueden escribirse como
\[\begin{align} \notag \ddot{x} - 2\Omega_z \dot{y} + \omega^2_0 x = 0 \\ \ddot{y} - 2\Omega_z \dot{x} + \omega^2_0 y = 0 \label{12.86} \end{align}\]
Se trata de dos ecuaciones acopladas que se pueden resolver haciendo una transformación de coordenadas.
Definir una nueva coordenada que sea un número complejo
\[\eta = x + iy \]
Multiplicar la segunda de las ecuaciones acopladas\ ref {12.86} por\(i\) y sumar a la primera ecuación da
\[(\ddot{x} + i \ddot{y})+2i\Omega_z (\dot{x} + i\dot{y}) + \omega^2_0 (x + iy)=0 \notag\]
que se puede escribir como una ecuación diferencial para\(\eta\)
\[\ddot{\eta} + 2i\Omega_z \dot{\eta} + \omega^2_0 \eta = 0 \label{12.88}\]
Tenga en cuenta que el número complejo\(\eta\) contiene la misma información respecto a la posición en el\(x−y\) plano que las ecuaciones\ ref {12.86}. La trama de\(\eta\) en el plano complejo, el diagrama de Argand, es una vista de pájaro de las coordenadas\((x,y)\) de posición del péndulo. Esta ecuación diferencial homogénea de segundo orden tiene dos soluciones independientes que se pueden derivar adivinando una solución de la forma
\[\eta (t) = A_e^{−i\alpha t} \label{12.89}\]
Sustituyendo la ecuación\ ref {12.89} en\ ref {12.88} da que
\[\alpha^2 − 2\Omega_z \alpha − \omega^2_o = 0 \notag\]
Eso es
\[\alpha = \Omega_z \pm\sqrt{\Omega^2_z + \omega^2_0}\]
Si la velocidad angular del péndulo\(\omega_0 \gg \Omega\), entonces
\[\alpha \simeq \Omega_Z \pm \omega_0 \]
Así la solución es de la forma
\[\eta (t) = e^{−i\Omega_zt} (A_+ e^{i\omega_0 t} + A_- e^{i\omega_0 t} ) \]
Esto se puede escribir como
\[\eta (t) = Ae^{−i\Omega_z t} \cos(\omega_0 t + \delta) \]
donde la fase\(\delta\) y amplitud\(A\) dependen de las condiciones iniciales. Así, el plano de oscilación del péndulo se define por la relación de las\(y\) coordenadas\(x\) y, es decir, el ángulo de fase\(i\Omega_z t\). Este ángulo de fase gira con velocidad angular\(\Omega_z\) donde
\[\Omega_z = \Omega \cos \theta = \Omega \sin \lambda \]
En el polo norte la tierra gira bajo el péndulo con velocidad angular\(\Omega\) y el eje del péndulo se fija en un marco inercial de referencia. En latitudes más bajas, el péndulo precede a la frecuencia angular inferior\(\Omega_z = \Omega \sin \lambda\) que va a cero en el ecuador. Por ejemplo, en Rochester, NY,\(\lambda = 43^{\circ} N\), y por lo tanto un péndulo de Foucault precede en\(\Omega_Z = 0.682\Omega \). Es decir, el péndulo precede\(245.5^{\circ}\) /día.