
13.3: Rotación de cuerpo rígido alrededor de un punto fijo del cuerpo
- Page ID
- 126423
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Con respecto a algún punto\(O\) fijado en el sistema de coordenadas del cuerpo, el momento angular del cuerpo\(\alpha\) viene dado por
\[\mathbf{L} = \sum^{n}_i \mathbf{L}_i = \sum^n_i \mathbf{r}_i \times \mathbf{p}_i\]
Hay dos opciones especialmente convenientes para el punto fijo\(O\). Si ningún punto en el cuerpo es fijo con respecto a un sistema de coordenadas inerciales, entonces lo mejor es elegir\(O\) como centro de masa. Si un punto del cuerpo está fijo con respecto a un sistema de coordenadas inerciales fijo, como un punto en el suelo donde toca la peonza de un niño, entonces lo mejor es elegir este punto estacionario como el punto fijo al cuerpo\(O\).
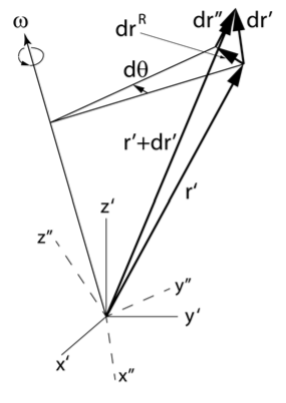
Considerar un cuerpo rígido compuesto por\(N\) partículas de masa\(m_{\alpha}\) donde\(\alpha = 1, 2, 3, \dots N\). Como se discutió en el capítulo\(12.4\), si el cuerpo gira con una velocidad angular instantánea\(\boldsymbol{\omega}\) alrededor de algún punto fijo, con respecto al sistema de coordenadas fijo al cuerpo, y este punto tiene una velocidad de traslación instantánea\(\mathbf{V}\) con respecto al sistema de coordenadas fijo (inercial), ver Figura\(\PageIndex{1}\), entonces la velocidad instantánea\(\mathbf{v}_{\alpha}\) de la\(\alpha^{th}\) partícula en el marco fijo de referencia viene dada por
\[\mathbf{v}_{\alpha} = \mathbf{V} + \mathbf{v}^{\prime\prime}_{\alpha} + \boldsymbol{\omega} \times \mathbf{r}^{\prime}_{\alpha}\]
Sin embargo, para un cuerpo rígido, la velocidad de un punto fijo al cuerpo con respecto al cuerpo es cero, es decir\(\mathbf{v}^{\prime\prime}_{\alpha} = 0\), por lo tanto
\[\mathbf{v}_{\alpha} = \mathbf{V} + \boldsymbol{\omega} \times \mathbf{r}^{\prime}_{ \alpha}\]
Considera que la velocidad de traslación del punto fijo\(O\) al cuerpo es cero, es decir,\(\mathbf{V} = 0\) y deja\(\mathbf{R} = 0\), entonces\(\mathbf{r}_{\alpha} = \mathbf{r}^{\prime}_{\alpha}\). Estos supuestos permiten que el momento lineal de la partícula\(\alpha\) se escriba como
\[\mathbf{p}_{\alpha} = m_{\alpha} \mathbf{v}_{\alpha} = m_{\alpha} \boldsymbol{\omega} \times \mathbf{ r}_{\alpha}\]
Por lo tanto
\[\mathbf{L} = \sum^N_{\alpha} \mathbf{r}_{\alpha} \times \mathbf{ p}_{\alpha} = \sum^N_{\alpha} m_{\alpha} \mathbf{r}_{\alpha} \times (\boldsymbol{\omega} \times\mathbf{ r}\alpha ) \]
Uso de la identidad vectorial
\[\mathbf{A} \times (\mathbf{B} \times \mathbf{ A}) = A^2\mathbf{B} − \mathbf{A} (\mathbf{A} \cdot \mathbf{B}) \notag\]
lleva a
\[\mathbf{L} = \sum^{N}_{\alpha} m_{\alpha} [r^2_{\alpha} \boldsymbol{\omega} − \mathbf{r}_{\alpha} (\mathbf{r}_{\alpha} \cdot \boldsymbol{\omega}) ]\]
El momento angular se puede expresar en términos de componentes\(\boldsymbol{\omega}\) y\(\mathbf{r}^{\prime}_{\alpha}\) relativos al marco fijo al cuerpo. Las siguientes fórmulas se pueden escribir de manera más compacta si\(\mathbf{r}_{\alpha} = (x_{\alpha }, y_{\alpha} , z_{\alpha} )\), en el marco fijo de cuerpo giratorio, se escribe en la forma\(\mathbf{r}_{\alpha} = (x_{\alpha ,1}, y_{\alpha ,2} , z_{\alpha ,3} )\) donde los ejes están definidos por los números\(1, 2, 3\) en lugar de\(x, y, z\). En esta notación, el momento angular se escribe en forma de componente como
\[L_{i}=\sum_{\alpha}^{N} m_{\alpha}\left[\omega_{i} \sum_{k} x_{\alpha, k}^{2}-x_{\alpha, i}\left(\sum_{j} x_{\alpha, j} \omega_{j}\right)\right] \label{13.9}\]
Asumir la relación delta de Kronecker
\[\omega_i = \sum^3_j \omega_j \delta_{ij} \label{13.10}\]
donde
\[\begin{aligned} \delta_{ij} & = & 1 && i=j \\ \delta_{ij} & = & 0 && i \neq j \end{aligned}\]
Sustituto\ ref {13.10} in\ ref {13.9} da
\ [\ begin {align}
L_ {i} &=\ sum_ {\ alpha} ^ {N} m_ {\ alpha}\ suma_ {j}\ left [\ omega_ {j}\ delta_ {i j}\ suma_ {k} x_ {\ alfa, k} ^ {2} -\ omega_ {j} x_ {alfa, i} x_ {alfa\, j}\ derecha]\ noetiqueta\\
&=\ suma_ {j} ^ {3}\ omega_ {j}\ izquierda [\ suma_ {\ alfa} ^ {N} m_ {\ alfa}\ izquierda (\ delta_ {i j}\ suma_ {k} x_ {\ alfa, k} ^ { 2} -x_ {\ alpha, i} x_ {\ alpha, j}\ derecha)\ derecha]
\ end {align}\]