
13.8: Teorema de ejes paralelos
- Page ID
- 126412
Los valores de los componentes del tensor de inercia dependen tanto de la ubicación como de la orientación alrededor de la cual gira el cuerpo en relación con el sistema de coordenadas fijo al cuerpo. El teorema de ejes paralelos es valioso para relacionar el tensor de inercia para la rotación alrededor de ejes paralelos que pasan por diferentes puntos fijos con respecto al cuerpo rígido. Por ejemplo, se puede desear relacionar el tensor de inercia a través del centro de masa con otra ubicación que está obligada a permanecer estacionaria, como la punta de la peonza.
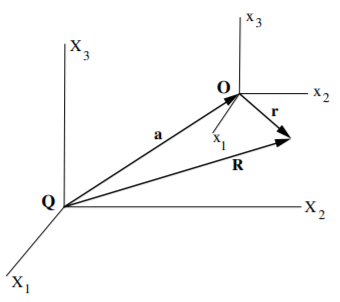
Considere la masa\({\alpha}\) en la ubicación\(\mathbf{r} = (x_1, x_2, x_3)\) con respecto al origen del sistema de coordenadas del centro de masa fijo al cuerpo\(O\). Transformar a un sistema de coordenadas arbitrario pero paralelo fijo al cuerpo\(Q\), es decir, los ejes de coordenadas tienen la misma orientación que el sistema de coordenadas del centro de masa. La ubicación de la masa\({\alpha}\) con respecto a este sistema de coordenadas arbitrarias es\(\mathbf{R} = (X_1, X_2, X_3)\). Es decir, los vectores generales para los dos sistemas de coordenadas están relacionados por
\[\mathbf{R} = \mathbf{a} + \mathbf{r} \label{13.34}\]
donde\(\mathbf{a}\) está el vector que conecta los orígenes de los sistemas de coordenadas\(O\) e\(Q\) ilustrado en la Figura\(\PageIndex{1}\). Los elementos del tensor de inercia con respecto al sistema de ejes\(Q\), están dados por la ecuación\((13.4.1)\) para ser
\[J_{i j} \equiv \sum_{\alpha}^{N} m_{\alpha}\left[\delta_{i j}\left(\sum_{k}^{3} X^2_{\alpha, k} \right) - X_{\alpha, i}X_{\alpha, j} \right] \]
Los componentes a lo largo de los tres ejes para cada uno de los dos sistemas de coordenadas están relacionados por
\[X_i = a_i + x_i\]
Sustituyendo estos en la relación de tensor de inercia anterior da
\ [\ begin {align}
J_ {i j} &=\ sum_ {\ alpha} ^ {N} m_ {\ alpha}\ left [\ delta_ {i j}\ left (\ sum_ {k} ^ {3}\ left (x_ {\ alpha, k} +a_ {i}\ right) ^ {2}\ right) -\ left (x_ {\ alpha, i} +a_ {i}\ derecha)\ izquierda (x_ {\ alfa, j} +a_ {i}\ derecha)\ derecha]\\
&=\ suma_ {\ alfa} ^ {N} m_ {\ alfa}\ izquierda [\ delta_ {i j}\ izquierda (\ suma_ {k} ^ {3} x_ {\ alfa, k} ^ {2}\ derecha) -x_ {\ alfa, i} x_ {\ alfa, j}\ derecha] +\ suma_ {\ alfa} ^ {N} m_ {\ alfa}\ izquierda [\ delta_ {i j}\ izquierda (\ sum_ {k} ^ {3}\ izquierda (2 x_ {\ alfa, k} a_ {k} +a_ {k} ^ {2}\ derecha)\ derecha) -\ izquierda (a_ {i} x_ {\ alfa, j} +a_ {j} x_ {\ alfa, i} +a_ {i} a_ {j}\ derecha)
\ noetiqueta\ final {align}\]
La primera suma en el lado derecho corresponde a los elementos\(I_{ij}\) del tensor de inercia en el marco de centro de masa. Así los términos pueden ser reagrupados para dar
\[J_{i j} \equiv I_{ij} + \sum_{\alpha}^{N} m_{\alpha} \left( \delta_{ij} \sum^3_k a^2_k - a_{i}a_j \right) + \sum_{\alpha}^{N} m_{\alpha}\left[2\delta_{i j} \sum_{k}^{3} x_{\alpha, k} a_{k} - a_i x_{\alpha, j} - a_{j} x_{\alpha, i} \right]\]
Sin embargo, cada término en el último paréntesis implica una suma de la forma\(\sum^N_{\alpha} m_{\alpha} x_{\alpha ,k}\). Tomar el sistema de coordenadas\(O\) para ser con respecto al centro de masa para el cual
\[\sum^N_{\alpha} m_{\alpha} \mathbf{r}^{\prime} = 0 \]
Esto también se aplica a cada componente\(k\), es decir
\[\sum^N_{\alpha} m_{\alpha} x_{\alpha ,k} = 0 \]
Por lo tanto todos los términos en el último paréntesis cancelan dejando
\[J_{i j} \equiv I_{ij} + \sum_{\alpha}^{N} m_{\alpha} \left( \delta_{ij} \sum^3_k a^2_k - a_{i}a_j \right)\]
Pero\(\sum^N_{\alpha} m_{\alpha} = M\) y\(\sum^3_k a^2_k = a^2\), por lo tanto
\[J_{ij} \equiv I_{ij} +M (a^2\delta_{ij} - a_ia_j)\]
donde\(I_{ij}\) está el tensor de inercia del centro de masa. Esta es la forma general del teorema de ejes paralelos de Steiner.
Como ejemplo, el momento de inercia alrededor del\(X_1\) eje viene dado por
\[J_{11} \equiv I_{11} + M((a^2_1 + a^2_2 + a^3_3) \delta_{11} - a^2_1) = I_{11} + M(a^2_2 + a^2_3) \]
que corresponde a la afirmación elemental de que la diferencia en los momentos de inercia es igual a la masa del cuerpo multiplicada por el cuadrado de la distancia entre los ejes paralelos,\(x_1, X_1\). Tenga en cuenta que el momento mínimo de inercia de un cuerpo es el\(I_{ij}\) que está alrededor del centro de masa.
Ejemplo\(\PageIndex{1}\): Inertia Tensor of a Solid Cube Rotating about the Center of Mass
Las expresiones complicadas para el tensor de inercia se pueden entender usando el ejemplo de un cubo sólido uniforme con lado\(b\)\(\rho\), densidad y masa\(M = \rho b^3\), girando alrededor de diferentes ejes. Supongamos que el origen del sistema de coordenadas\(O\) está en el centro de masa con los ejes perpendiculares a los centros de las caras del cubo.
Los componentes del tensor de inercia se pueden calcular usando\((13.4.2)\) escrito como una integral sobre la distribución de masa en lugar de una suma.
\[I_{ij} = \int \rho ( \mathbf{r}^{\prime} ) \left(\delta_{ij} \left( \sum^3_k x^2_k \right) -x_ix_j\right) dV \nonumber\]
Así
\[\begin{align*} I_{11} & = \rho \int^{b/2}_{-b/2} \int^{b/2}_{-b/2} \int^{b/2}_{-b/2} (x^2_2 + x^2_3) dx_3 dx_2 dx_1 \\[4pt] & = \frac{1}{6} \rho b^5 = \frac{1}{6} Mb^2 = I_{22} = I_{33} \end{align*}\]
Por simetría los momentos diagonales de inercia alrededor de cada cara son idénticos. De igual manera los productos de inercia son dados por
\[I_{12} = -\rho \int^{b/2}_{-b/2} \int^{b/2}_{-b/2} \int^{b/2}_{-b/2} (x_1x_2) dx_3 dx_2 dx_1 = 0\notag\]
Así el tensor de inercia viene dado por
\[\mathbf{I}^{cm} = \frac{1}{6} Mb^2 \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} \notag\]
Obsérvese que este tensor de inercia es diagonal, lo que implica que este es el sistema de eje principal. En este caso los tres momentos principales de inercia son idénticos y perpendiculares a los centros de las caras del cubo. Esto es como se esperaba de la simetría de la geometría cúbica.
Ejemplo\(\PageIndex{2}\): Inertia tensor of about a corner of a solid cube.
Cálculo directo
Deje que una esquina del cubo sea el origen del sistema de coordenadas\(Q\) y asuma que los tres lados adyacentes del cubo se encuentran a lo largo de los ejes de coordenadas. Los componentes del tensor de inercia se pueden calcular utilizando\((13.4.2)\). Así
\[I_{11} = \rho \int^b_0 \int^b_0 \int^b_0 (x^2_2 + x^2_3) dx_3 dx_2 dx_1 = \frac{2}{3} \rho b^5 = \frac{2}{3} Mb^2 \notag\]
\[I_{12} = \rho \int^b_0 \int^b_0 \int^b_0 (x_1 x_2) dx_3 dx_2 dx_1 = -\frac{1}{4} \rho b^5 = - \frac{1}{4} Mb^2 \notag\]
Así, la evaluación de los nueve componentes da
\[\mathbf{I}^{corner} = \frac{1}{12} Mb^2 \begin{pmatrix} 8 & -3 & -3 \\ -3 & 8 & -3 \\ -3 & -3 & 8 \end{pmatrix} \nonumber\]
Teorema de eje paralelo
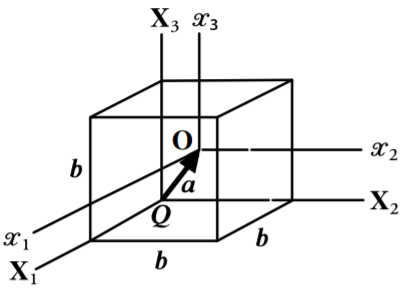
Este tensor de inercia también se puede calcular utilizando el teorema de ejes paralelos para relacionar el momento de inercia alrededor de la esquina, con el del centro de masa. Como se muestra en la Figura\(\PageIndex{2}\), el vector\(a\) tiene componentes
\[a_1 = a_2 = a_3 = \frac{b}{2}\nonumber\]
Aplicando el teorema del eje paralelo da
\[J_{11} = I_{11} + M ( a^2 − a^2_1) = I_{11} + M ( a^2_2 + a^2_3) = \frac{1}{6} Mb^2 + \frac{1}{2} Mb^2 = \frac{2}{3} Mb^2 \nonumber\]
y de manera similar para\(J_{22}\) y\(J_{33}\). Los términos fuera de la diagonal vienen dados por
\[J_{12} = I_{12} + M (−a_1a_2) = −\frac{1}{4}Mb^2 \nonumber\]
Así el tensor de inercia, transpuesto desde el centro de masa, a la esquina del cubo es
\[\mathbf{I}^{corner} = \begin{pmatrix} \frac{2}{3} Mb^2 & -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 \\ -\frac{1}{4}Mb^2 & \frac{2}{3} Mb^2 & -\frac{1}{4} Mb^2\\ -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 & \frac{2}{3} Mb^2\end{pmatrix} = \frac{1}{12} Mb^2 \begin{pmatrix} 8 & -3 & -3 \\ -3 & 8 & -3 \\ -3 & -3 & 8 \end{pmatrix} \nonumber\]
Este tensor de inercia alrededor de la esquina del cubo, es el mismo que el obtenido por integración directa.
Principales momentos de inercia
El marco del eje de coordenadas utilizado para la rotación alrededor de la esquina del cubo no es un marco de eje principal. Por lo tanto, diagonalicemos el tensor de inercia para encontrar el marco del eje principal y los momentos principales de inercia alrededor de una esquina. Para lograrlo se requiere resolver el determinante laico
\[\begin{vmatrix} (\frac{2}{3} Mb^2 - I) & -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 \\ -\frac{1}{4} Mb^2 & (\frac{2}{3} Mb^2 - I) & -\frac{1}{4} Mb^2\\ -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 & (\frac{2}{3} Mb^2 - I) \end{vmatrix} = 0 \notag\]
El valor de un determinante no se ve afectado al sumar o restar ninguna fila o columna de ninguna otra fila o columna. Restar fila 1 de fila 2 da
\[\begin{vmatrix} (\frac{2}{3} Mb^2 - I) & -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 \\ -\frac{11}{12} Mb^2 & (\frac{11}{12} Mb^2 - I) & 0 \\ -\frac{1}{4} Mb^2 & -\frac{1}{4} Mb^2 & (\frac{2}{3} Mb^2 - I) \end{vmatrix} = 0 \notag\]
El determinante de esta matriz es sencillo de evaluar e iguala
\[\left(\frac{1}{6}Mb^2 - I \right) \left( \frac{11}{12}Mb^2 - I\right) \left(\frac{11}{12}Mb^2 - I \right) = 0 \nonumber\]
Así las raíces son
\[\mathbf{I}^{corner} = \begin{pmatrix} \frac{1}{6}Mb^2 & 0 & 0 \\ 0 & \frac{11}{12}Mb^2 & 0 \\ 0 & 0 & \frac{11}{12}Mb^2 \end{pmatrix}\notag\]
Las raíces idénticas\(I_{22} = I_{33} = \frac{11}{12} Mb^2\) implican que el eje principal asociado\(I_{11}\) debe ser un eje de simetría. La orientación se puede encontrar sustituyendo\(I_{11}\) en la ecuación anterior
\[(\{\mathbf{I}\} − I \{\mathbb{I}\}) \cdot \boldsymbol{\omega} = \frac{1}{12} Mb^2 \begin{pmatrix} 6 & −3 & −3\\ −3& 6 & −3\\ −3 &−3 & 6 \end{pmatrix} \begin{pmatrix} \omega_{11} \\ \omega_{21} \\ \omega_{31} \end{pmatrix} = 0 \notag\]
donde el segundo subíndice 1 unido a\(\omega_i\) significa que esta solución corresponde a\(I_{11}\). Esto da
\[\begin{aligned} 2\omega_{11} − \omega_{21} − \omega_{31} = 0 \\ −\omega_{11} + 2\omega_{21} − \omega_{31} = 0 \\ −\omega_{11} − \omega_{21} + 2\omega_{31} = 0 \end{aligned}\]
Resolver estas tres ecuaciones da el vector unitario para el primer eje principal\(I_{11} = \frac{1}{6} Mb^2\) para el cual ser\(\mathbf{\hat{e}}_1= \frac{1}{\sqrt{3}} \begin{pmatrix} 1 \\ 1 \\ 1 \end{pmatrix}\). Esto se puede repetir para encontrar los otros dos ejes principales sustituyendo\(I_{22} = \frac{11}{12} Mb^2\). Esto da por segundo momento principal\(I_{22}\)
\[(\{\mathbf{I}\} − I \{\mathbb{I}\}) \cdot \boldsymbol{\omega} = \frac{1}{12} Mb^2 \begin{pmatrix} −3 & −3 & −3\\ −3& −3& −3\\ −3 &−3 &−3 \end{pmatrix} \begin{pmatrix} \omega_{12} \\ \omega_{22} \\ \omega_{32} \end{pmatrix} = 0 \notag\]
Esto da como resultado tres ecuaciones idénticas para los componentes de\(\omega\) pero las tres ecuaciones son iguales, a saber
\[\omega_{12} + \omega_{22} + \omega_{32} = 0 \notag\]
Esto no determina de manera única la dirección de\(\omega\). Sin embargo, sí implica que\(\omega_2\) correspondiente al segundo eje principal tiene la propiedad de que
\[\boldsymbol{\hat{\omega}} \cdot \mathbf{\hat{e}}_1 = 0 \notag\]
es decir, cualquier dirección a la\(\hat{e}_2\) que sea perpendicular\(\hat{e}_1\) es aceptable. En otras palabras; dos vectores unitarios ortogonales cualesquiera\(\hat{e}_2\) y\(\hat{e}_3\) que sean perpendiculares a\(\hat{e}_1\) son aceptables. Esta ambigüedad existe siempre que dos valores propios son iguales; los tres ejes principales solo se definen de manera única si los tres valores propios son diferentes. La misma ambigüedad existe cuando los tres valores propios son idénticos como ocurre para los principales momentos de inercia alrededor del centro de masa de un cubo sólido uniforme. Esto explica por qué el momento principal de inercia para la diagonal del cubo, que pasa por el centro de masa, tiene el mismo momento que cuando los ejes principales pasan por el centro de las caras del cubo.