
13.13: Ángulos de Euler
- Page ID
- 126490
La descripción de la rotación de cuerpo rígido se facilita en gran medida al transformarse del marco de coordenadas fijo en el espacio\((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) a un marco de coordenadas giratorio fijo al cuerpo\((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) para el que el tensor de inercia es diagonal. Apéndice\(19.4\) introdujo la matriz de rotación\(\{\boldsymbol{\lambda}\}\) que se puede utilizar para rotar entre el sistema de coordenadas fijas en el espacio, que es estacionario, y el marco instantáneo fijo al cuerpo que gira con respecto al marco fijo al espacio. La transformación puede ser representada por una ecuación matricial
\[(\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}}) = \{\boldsymbol{\lambda}\} \cdot (\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\]
donde el sistema de espacio fijo es identificado por vectores unitarios\((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) mientras\((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) define vectores unitarios en el sistema fijo de cuerpo girado. La matriz de rotación describe\(\{\boldsymbol{\lambda}\}\) completamente la orientación relativa instantánea de los dos sistemas. La rotación de cuerpo rígido requiere tres parámetros angulares independientes que especifiquen la orientación del cuerpo rígido de tal manera que la matriz de transformación ortogonal correspondiente sea la adecuada, es decir, tiene un determinante\(|\lambda | = +1\) dado por la ecuación\((19.4.33)\).
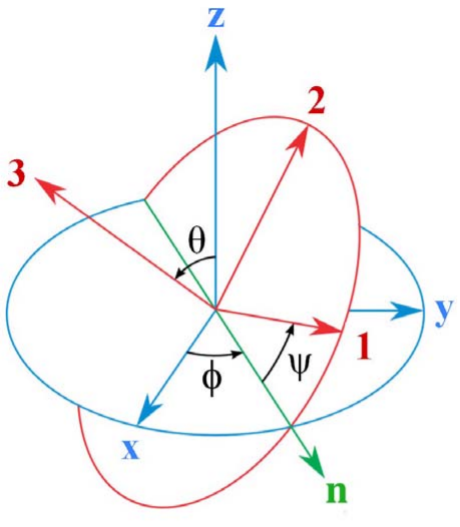
Como se discutió en el Apéndice\(19.4.2\), la matriz de rotación de 9 componentes involucra solo tres ángulos independientes. Hay muchas opciones posibles para estos tres ángulos. Es conveniente utilizar los ángulos de Euler,\(\phi , \theta , \psi ,\) (también llamados ángulos eulerianos) mostrados en la Figura\(\PageIndex{1}\). 1 Los ángulos de Euler son generados por una serie de tres rotaciones que giran desde el\((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) sistema de espacio fijo al\((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) sistema bodyfixed. La rotación debe ser tal que el\(z\) eje de espacio fijo gire en un ángulo\(\theta\) para alinearse con el eje 3 fijo al cuerpo. Esto se puede realizar rotando a través de un ángulo\(\theta\) alrededor de la\(\mathbf{\hat{n}} \equiv \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) dirección, donde\(\mathbf{\hat{z}}\) y\(\mathbf{\hat{3}}\) designando los vectores unitarios a lo largo de los ejes “\(z\)” de los marcos fijos de espacio y cuerpo respectivamente. El vector unitario\(\mathbf{\hat{n}} \equiv \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) es el vector normal al plano definido por los vectores\(\mathbf{\hat{z}}\) y\(\mathbf{\hat{3}}\) unitarios y este vector unitario\(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) se denomina la línea de nodos. La convención elegida es que el vector unitario\(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) esté a lo largo del eje “\(x\)” de una trama de eje intermedio designada por\((\mathbf{\hat{n}}, \mathbf{\hat{y}}^{\prime} ,\mathbf{\hat{z}})\), es decir, el vector unitario\(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) más los vectores unitarios\(\mathbf{\hat{y}}^{\prime}\) y\(\mathbf{\hat{z}}\) están en el mismo plano que los vectores\(\mathbf{\hat{3}}\) unitarios\(\mathbf{\hat{z}}\) y. La secuencia de tres rotaciones se realiza como se resume a continuación.
1) Rotación\(\phi\) alrededor del\(\mathbf{\hat{z}}\) eje de espacio fijo desde el\(\mathbf{\hat{x}}\) eje espacial hasta la línea de nodos\(\mathbf{\hat{n}}\):
La primera rotación\((\mathbf{x}, \mathbf{y}, \mathbf{z}) \cdot \boldsymbol{\lambda}_{\phi} \rightarrow (\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z})\) es en una dirección diestra a través de un ángulo\(\phi\) alrededor del\(\mathbf{z}\) eje fijo en el espacio. Dado que la rotación tiene lugar en el\(\mathbf{x} − \mathbf{y}\) plano, la matriz de transformación es
\[\{\boldsymbol{\lambda}_{\phi} \} = \begin{pmatrix} \cos \phi & \sin \phi & 0 \\ − \sin \phi & \cos \phi & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
Esto lleva al sistema de coordenadas intermedias\((\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z})\) donde el\(\mathbf{x}\) eje girado ahora es colineal con el\(\mathbf{n}\) eje del marco intermedio, es decir, la línea de nodos.
\[(\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z}) = \{\boldsymbol{\lambda}_{\phi} \} \cdot (\mathbf{x}, \mathbf{y}, \mathbf{z}) \]
La velocidad angular de precesión\(\dot{\phi}\) es la velocidad de cambio del ángulo de la línea de nodos con respecto al\(x\) eje espacial alrededor del\(z\) eje fijo en el espacio.
2) Rotación\(\theta\) alrededor de la línea de nodos\(\mathbf{\hat{n}}\) desde el\(\mathbf{\hat{z}}\) eje espacial hasta el\(\mathbf{\hat{3}}\) eje fijo al cuerpo:
La segunda rotación
\[(\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z}) \cdot \lambda_{\theta} \rightarrow (\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3}) \]
está en una dirección diestra a través del ángulo\(\theta\) alrededor del\(\mathbf{\hat{n}}\) eje (línea de nodos) para que el eje “\(z\)” se vuelva colineal con el\(\mathbf{\hat{3}}\) eje fijo al cuerpo. Debido a que la rotación ahora está en el\(\mathbf{\hat{z}}−\mathbf{\hat{3}}\) plano, la matriz de transformación es
\[\{\boldsymbol{\lambda}_{\theta} \} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos \theta & \sin \theta \\ 0 & − \sin \theta & \ cos \theta \end{pmatrix} \]
La línea de nodos que se encuentra en la intersección de los planos de espacio fijo y fijo al cuerpo, que se muestra en la Figura\(\PageIndex{1}\), apunta en la\(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) dirección. El nuevo eje “\(z\)” ahora es el\(\mathbf{\hat{3}}\) eje fijo al cuerpo. La velocidad angular\(\dot{\theta}\) es la velocidad de cambio del ángulo del eje fijo al cuerpo relativo al\(\mathbf{\hat{3}}\) eje fijo en el espacio\(\mathbf{\hat{z}}\) alrededor de la línea de nodos.
3) Rotación\(\psi\) alrededor del\(\mathbf{\hat{3}}\) eje fijo al cuerpo desde la línea de nodos hasta el\(\mathbf{\hat{1}}\) eje fijo al cuerpo:
La tercera rotación
\[(\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3}) \cdot \lambda_{\psi} \rightarrow (\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}}) \]
está en una dirección derecha a través del ángulo\(\psi\) alrededor del nuevo\(\mathbf{\hat{3}}\) eje fijo al cuerpo. Esta tercera rotación transforma el\((\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3})\) marco intermedio girado en el sistema de coordenadas final fijo al cuerpo\((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\). La matriz de transformación es
\[\{\boldsymbol{\lambda}_{\psi} \} = \begin{pmatrix} \cos \psi & \sin \psi & 0 \\ − \sin\psi & \cos \psi & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
La velocidad angular de giro\(\dot{\psi}\) es la velocidad de cambio del ángulo del\(\mathbf{1}\) eje fijo al cuerpo con respecto a la línea de nodos alrededor del\(\mathbf{3}\) eje fijo al cuerpo.
La matriz de rotación total\(\{\boldsymbol{\lambda}\}\) viene dada por
\[\{\boldsymbol{\lambda}\} = \{\boldsymbol{\lambda}_{\psi} \} \cdot \{\boldsymbol{\lambda}_{\theta} \} \cdot \{\boldsymbol{\lambda}_{\phi} \} \label{13.81}\]
Así, la rotación completa desde el sistema de eje fijo al sistema de\((\mathbf{x}, \mathbf{y}, \mathbf{z})\) eje fijo al sistema de\((\mathbf{1}, \mathbf{2}, \mathbf{3})\) eje fijo al cuerpo viene dada por
\[(\mathbf{1}, \mathbf{2}, \mathbf{3}) = \{\boldsymbol{\lambda}\} \cdot (\mathbf{x}, \mathbf{y}, \mathbf{z}) \]
donde\(\{\boldsymbol{\lambda}\}\) viene dado por el triple producto Ecuación\ ref {13.81} que conduce a la matriz de rotación
\[\{\boldsymbol{\lambda}\} = \begin{pmatrix} \cos \phi \cos \psi − \sin \phi \cos \theta \sin \psi & \sin \phi \cos \psi + \cos \phi \cos \theta \sin \psi & \sin \theta \sin \psi \\ − \cos \phi \sin \psi − \sin \phi \cos \theta \cos \psi & − \sin \phi \sin \psi + \cos \phi \cos \theta \cos \psi & \sin \theta \cos \psi \\ \sin \phi \sin \theta & − \cos \phi \sin \theta & \cos \theta \end{pmatrix} \]
La transformación inversa del sistema de eje fijo al sistema de eje fijo al sistema de ejes fijos en el espacio viene dada por
\[(\mathbf{x}, \mathbf{y}, \mathbf{z}) = \{\boldsymbol{\lambda}\}^{− 1} \cdot (\mathbf{1}, \mathbf{2}, \mathbf{3}) \]
donde la matriz inversa\(\{\boldsymbol{\lambda}\}^{−1}\) es igual a la matriz de rotación transpuesta\(\{\boldsymbol{\lambda}\}^{T}\), es decir,
\[\{\boldsymbol{\lambda}\}^{−1} = \{\boldsymbol{\lambda}\}^T = \begin{pmatrix} \cos \phi \cos \psi − \sin \phi \cos \theta \sin \psi & − \cos \phi \sin \psi − \sin \phi \cos \theta \cos \psi & \sin \phi \sin \theta \\ \sin \phi \cos \psi + \cos \phi \cos \theta \sin \psi & − \sin \phi \sin \psi + \cos \phi \cos \theta \cos \psi & - \cos \phi \sin \theta \\ \sin \theta \sin \psi & \sin \theta \cos \psi & \cos \theta \end{pmatrix} \]
Tomando el producto\(\{\boldsymbol{\lambda}\} \{\boldsymbol{\lambda}\}^{ −1} = 1\) muestra que la matriz de rotación es una matriz unitaria adecuada, ortogonal.
El uso de tres sistemas de coordenadas diferentes, el espacio fijo, la línea intermedia de nodos y el marco fijo al cuerpo puede resultar confuso a primera vista. Básicamente el ángulo\(\phi\) especifica la rotación alrededor del eje espacio-fijo entre el\(z\) eje espacio-fijo\(x\) y la línea de nodos del marco intermedio del ángulo de Euler. El ángulo\(\psi\) especifica la rotación alrededor del eje 3 fijo al cuerpo entre la línea de nodos y el eje 1 fijo al cuerpo. Tenga en cuenta que aunque los sistemas de ejes fijos al espacio y fijos al cuerpo son ortogonales, la base del ángulo de Euler en general no es ortogonal. Para la rotación de cuerpo rígido, el ángulo de rotación\(\phi\) alrededor del\(z\) eje fijo en el espacio depende del tiempo, es decir, la línea de nodos gira con una velocidad angular\(\dot{\phi}\) con respecto al marco de coordenadas fijo en el espacio. De manera similar, el marco de coordenadas fijo al cuerpo gira alrededor del eje 3 fijo al cuerpo con velocidad angular\(\dot{\psi}\) relativa a la línea de nodos.
Ejemplo\(\PageIndex{1}\): Euler angle transformation
La definición de los ángulos de Euler puede resultar confusa, por lo tanto, es útil ilustrar su uso para una transformación rotacional de un marco imprimado\((x^{\prime}, y^{\prime} , z^{\prime} )\) a un marco sin imprimación\((x,y,z)\). Supongamos que la primera rotación alrededor del\(z^{\prime}\) eje, es\(\phi = 30^{\circ}\)
\[ \lambda_{\phi} = \begin{pmatrix} \frac{\sqrt{3}}{2} & \frac{1}{2} & 0 \\ −\frac{1}{2} & \frac{\sqrt{3}}{2} & 0 \\ 0 & 0 & 1 \end{pmatrix} \notag\]
Que la segunda rotación sea\(\theta = 45^{\circ}\) alrededor de la línea de nodos, es decir, el eje intermedio\(x\)”. Entonces
\[\lambda_{\theta} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ 0 & -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix} \notag\]
Deje que la tercera rotación sea\(\psi = 90^{\circ}\) alrededor del\(z\) eje.
\[\lambda_{\psi} = \begin{pmatrix} 0 & 1 & 0 \\ −1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix} \notag\]
Así, la rotación neta corresponde a\(\lambda = \lambda_{\psi} \lambda_{\theta} \lambda_{\phi}\)
\[\lambda = \begin{pmatrix} \frac{\sqrt{3}}{2} & \frac{1}{2} & 0 \\ −\frac{1}{2} & \frac{\sqrt{3}}{2} & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ 0 & -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix} \begin{pmatrix} 0 & 1 & 0 \\ −1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} -\frac{1}{4}\sqrt{2} & \frac{1}{2}\sqrt{3} & \frac{1}{4}\sqrt{2} \\ −\frac{1}{4}\sqrt{6} & -\frac{1}{2} & \frac{1}{4}\sqrt{6} \\ \frac{1}{2}\sqrt{2} & 0 & \frac{1}{2}\sqrt{2} \end{pmatrix} \notag\]
1 El marco de coordenadas fijo al espacio y los marcos de coordenadas fijos al cuerpo se definen sin ambigüedades, es decir, el marco fijo en el espacio es estacionario mientras que el marco fijo al cuerpo es el marco del eje principal del cuerpo. Existen varios marcos intermedios posibles que se pueden utilizar para definir los ángulos de Euler. La\(z-x-z\) secuencia de rotaciones, utilizada aquí, se utiliza en la mayoría de los libros de texto de física en mecánica clásica. Desafortunadamente, los científicos e ingenieros utilizan convenciones ligeramente diferentes para definir los ángulos de Euler. Como se discutió en el Apéndice A de “Mecánica Clásica” de Goldstein, los físicos nucleares y de partículas han adoptado la\(z-y-z\) secuencia de rotaciones mientras que los aerodinamistas de Estados Unidos y Reino Unido han adoptado una\(x-y-z\) secuencia de rotaciones.