
13.18: Ecuaciones de movimiento de Lagrange para rotación de cuerpo rígido
- Page ID
- 126454
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Las ecuaciones de movimiento de Euler se derivaron utilizando conceptos newtonianos de torque y momento angular. Es de interés derivar las ecuaciones de movimiento utilizando la mecánica lagrangiana. Es conveniente utilizar un par generalizado\(N\) y asumir que\(U = 0\) en las ecuaciones de Lagrange-Euler. Tenga en cuenta que la fuerza generalizada es un par ya que la coordenada generalizada correspondiente es un ángulo, y el momento conjugado es el momento angular. Si se elige el marco de referencia fijo al cuerpo para que sea el sistema de ejes principales, entonces, dado que el tensor de inercia es diagonal en el marco del eje principal, la energía cinética se da en términos de los momentos principales de inercia como
\[T = \frac{1}{2} \sum_i I_i \omega^2_i \label{13.104}\]
Usando los ángulos de Euler como coordenadas generalizadas, luego la ecuación de Lagrange para el caso específico de la\(\psi\) coordenada e incluyendo una fuerza generalizada\(N_{\psi}\) da
\[\frac{d}{dt} \frac{\partial T}{\partial \dot{\psi}} − \frac{\partial T}{\partial \psi} = N_{\psi} \]
que se puede expresar como
\[\frac{d}{dt} \sum^3_i \frac{\partial T}{\partial \omega_i} \frac{\partial \omega_i}{\partial \dot{\psi}} − \sum^3_i \frac{\partial T}{\partial \omega_i} \frac{\partial \omega_i}{\partial \psi } = N_{\psi} \label{13.106}\]
Ecuación\ ref {13.104} da
\[\frac{\partial T}{\partial \omega_i} = I_i \omega_i\]
Diferenciando los componentes de velocidad angular en el marco fijo al cuerpo, las ecuaciones\((13.14.1-13.14.3)\) dan
| \(\frac{\partial \omega_1}{\partial \psi} = \dot{\phi} \sin \theta \cos \psi − \dot{\theta} \sin\psi = \omega_2\) | \(\frac{\partial \omega_1 }{\partial \dot{\psi}} = \frac{\partial \omega_2}{ \partial \dot{\psi}} = 0\) |
| \(\frac{\partial \omega_2 }{\partial \psi} = −\dot{\phi} \sin \theta \sin \psi − \dot{\theta} \cos \psi = −\omega_1\) | \(\frac{\partial \omega_1 }{\partial \dot{\psi}} = \frac{\partial \omega_2}{ \partial \dot{\psi}} = 0\) |
| \(\frac{\partial \omega_3}{\partial \psi} = 0\) | \(\frac{\partial \omega_3 }{\partial \dot{\psi}} = 1\) |
Sustituyendo estos en la Ecuación de Lagrange\ ref {13.106} da
\[\frac{d}{dt} I_3\omega_3 − I_1\omega_1\omega_2 + I_2\omega_2 (−\omega_1) = N_3 \]
ya que los\(\widehat{\mathbf{e}_3}\) ejes\(\psi\) y son colineales. Esto se puede reescribir como
\[I_3\dot{\omega}_3 − (I_1 − I_2) \omega_1\omega_2 = N_3 \]
Cualquier eje podría haber sido designado como\(\widehat{\mathbf{e}_3}\) eje, así la ecuación anterior puede generalizarse a los tres ejes para dar
\[\begin{align} I_1\dot{\omega}_1 − (I_2 − I_3) \omega_2\omega_3 = N_1 \\ I_2\dot{\omega}_2 − (I_3 − I_1) \omega_3\omega_1 = N_2 \notag \\ I_3\dot{\omega}_3 − (I_1 − I_2) \omega_1\omega_2 = N_3 \notag \end{align}\]
Estas son las ecuaciones de Euler dadas anteriormente en\((13.17.6)\). Tenga en cuenta que aunque\(\dot{\omega}_3\) es la ecuación de movimiento para la\(\psi\) coordenada, esto no es cierto para las\(\boldsymbol{\theta}\) rotaciones\(\boldsymbol{\phi}\) y que no están a lo largo del cuerpo fijo\(x_1\) y\(x_2\) ejes como se da en la tabla\(13.14.1\).
Ejemplo\(\PageIndex{1}\): Rotation of a dumbbell
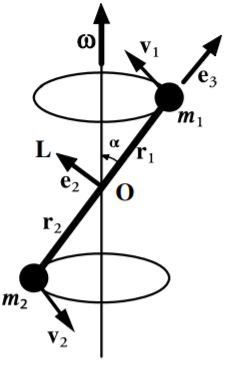
Considera el movimiento de la mancuerna simétrica que se muestra en la figura adyacente. Vamos\(|r_1| = |r_2| = b\). Deje que el sistema de coordenadas fijo al cuerpo tenga su origen en\(O\) y el eje de simetría\(\widehat{\mathbf{e}_3}\) esté a lo largo del eje sin peso hacia\(m_1\) y\(\mathbf{v}_{\alpha} = v_{\alpha} \hat{e}_1\). El momento angular viene dado por
\[\mathbf{L} = \sum_i m_i \mathbf{r} \times \mathbf{v}\notag\]
Debido a que\(\mathbf{L}\) es perpendicular al eje, y\(\mathbf{L}\) gira alrededor a\(\boldsymbol{\omega}\) medida que gira el eje, dejar\(\widehat{\mathbf{e}_2}\) estar a lo largo\(\mathbf{L}\).
\[\mathbf{L} = L_2 \widehat{\mathbf{e}_2} \notag\]
Si\(\alpha\) es el ángulo entre\(\boldsymbol{\omega}\) y el eje, los componentes de\(\boldsymbol{\omega}\) son
\[\begin{aligned} \omega_1 = 0 \\ \omega_2 = \omega \sin \alpha \\ \omega_3 = \omega \cos \alpha \end{aligned}\]
Supongamos que los momentos principales de la mancuerna son
\[\begin{aligned} I_1 = (m_1 + m_2) b^2 \\ I_2 = (m_1 + m_2) b^2 \\ I_3 = 0 \end{aligned}\]
Por lo tanto, el momento angular viene dado por
\[\begin{aligned} L_1 = I_1\omega_1 = 0 \\ L_2 = I_2\omega_2 = (m_1 + m_2) b^2 \omega \sin \alpha \\ L_3 = I_3 \omega_3 = 0 \end{aligned}\]
lo cual es consistente con el momento angular que se encuentra a lo largo del\(\widehat{\mathbf{e}_2}\) eje.
Usando las ecuaciones de Euler, y asumiendo que la velocidad angular es constante\(\dot{\omega}= 0\), es decir, entonces los componentes del par requerido para satisfacer este movimiento son
\[\begin{aligned} N_1 = − (m_1 + m_2) b^2 \omega^2 \sin \alpha \cos \alpha \\ N_2 = 0 \\ N_3 = 0 \end{aligned}\]
Es decir, este movimiento solo puede ocurrir en presencia del par aplicado anteriormente que está en la dirección\(-\widehat{\mathbf{e}_1}\), es decir, mutuamente perpendicular a\(\widehat{\mathbf{e}_2}\) y\(\widehat{\mathbf{e}_3}\). Este par se puede escribir como\(\mathbf{N} = \boldsymbol{\omega} \times \mathbf{L}\).