
13.20: Rotación sin par de un rotor rígido inercialmente simétrico
- Page ID
- 126464
Ecuaciones de movimiento de Euler
Hay muchas situaciones en las que uno tiene movimiento rígido-cuerpo libre de pares externos, es decir,\(\mathbf{N} = 0\). El movimiento de volteo de un bastón de malabaristas, un buzo, una galaxia giratoria o un frisbee, son ejemplos de rotación de cuerpo rígido. Para una rotación sin par, el cuerpo girará alrededor del centro de masa, y así se requiere el tensor de inercia con respecto al centro de masa. Un cuerpo rígido inercialmente simétrico tiene dos momentos principales idénticos de inercia con\(I_1 = I_2 \neq I_3\), y proporciona un ejemplo simple que ilustra el movimiento subyacente. Las ecuaciones de Euler libres de fuerza para el cuerpo simétrico en el sistema de eje principal fijo al cuerpo vienen dadas por
\[ \begin{align} (I_2 − I_3) \omega_2\omega_3 − I_1\dot{\omega}_1 &= 0 \label{13.111} \\[4pt] (I_3 − I_1) \omega_3\omega_1 − I_2\dot{\omega}_2 &= 0 \label{13.112} \\[4pt] I_3\dot{\omega}_3 &= 0 \label{13.113} \end{align}\]
donde\(I_1 = I_2\) y\(N = 0\) aplicar.

Tenga en cuenta que para el movimiento sin par de un cuerpo simétrico inercialmente La ecuación\ ref {13.113} implica que\(\dot{\omega}_3 = 0\),\(\omega_3\) es decir, es una constante de movimiento y por lo tanto es una variable cíclica para el cuerpo rígido simétrico.
Las ecuaciones\ ref {13.111} y\ ref {13.112} se pueden escribir como dos ecuaciones acopladas
\[\dot{\omega}_1 + \Omega \omega_2 = 0 \label{13.114}\]
\[\dot{\omega}_2 − \Omega \omega_1 = 0 \label{13.115}\]
donde la velocidad angular de precesión\(\mathbf{\Omega} = \dot{\psi}\) con respecto al marco fijo al cuerpo se define como
\[\mathbf{\Omega} \equiv \left( \frac{(I_3 − I_1)}{I_1} \boldsymbol{\omega}_3 \right) \label{13.116}\]
Combinando las derivadas de tiempo de las ecuaciones\ ref {13.114} y\ ref {13.115} conduce a dos ecuaciones desacopladas
\[\ddot{\omega}_1 + \Omega^2 \omega_1 = 0 \]
\[ \ddot{\omega}_2 + \Omega^2 \omega_2 = 0 \]
Estas son las ecuaciones diferenciales para un oscilador armónico con soluciones
\[\omega_1 = A \cos \Omega t\]
\[\omega_2 = A \sin \Omega t\]
Estas ecuaciones describen un vector que\(A\) gira en un círculo de radio\(A\) alrededor de un eje perpendicular a\(\hat{e}_3\), es decir, que gira en el\(\hat{e}_1 − \hat{e}_2\) plano con frecuencia angular\(\Omega = −\dot{\psi}\). Tenga en cuenta que
\[\omega^2_1 + \omega^2_2 = A^2 \label{13.120}\]
que es una constante. Además\(\omega_3\) es constante, por lo tanto la magnitud de la velocidad angular total
\[|\boldsymbol{\omega} | = \sqrt{ \omega^2_1 + \omega^2_2 + \omega^2_3 }= \text{ constant} \label{13.121}\]
El movimiento del cuerpo simétrico sin par es que la velocidad angular\(\boldsymbol{\omega}\) precede alrededor del eje de simetría\(\hat{e}_3\) del cuerpo en un ángulo\(\alpha\) con una frecuencia de precesión constante\(\Omega\) con respecto al marco fijo al cuerpo como se muestra en la Figura\(\PageIndex{1}\). Así, para un observador en el cuerpo,\(\boldsymbol{\omega}\) traza un cono alrededor del eje de simetría fijado al cuerpo. Observe de\ ref {13.116} que los vectores\(\Omega \hat{e}_3\) y\(\omega_3\hat{e}_3\) son paralelos cuando\(\Omega\) es positivo, es decir,\(I_3 > I\) (forma oblata) y antiparalelo if\(I_3 < I\) (forma prolada).
Para el sistema considerado, la orientación del vector de momento angular\(\mathbf{L}\) debe ser estacionaria en el marco inercial fijo en el espacio ya que el sistema está libre de par, es decir,\(\mathbf{L}\) es una constante de movimiento. También tenemos que la proyección del momento angular sobre el eje de simetría fijo al cuerpo es una constante de movimiento, es decir, es una variable cíclica. Por lo tanto
\[L_3 = I_3 \omega_3 = \frac{I_1I_3}{(I_3 − I_1)} \Omega \]
La comprensión de la relación entre el momento angular y la velocidad angular se facilita considerando otra constante de movimiento para el rotor simétrico sin par, a saber, la energía cinética rotacional.
\[T_{rot} = \frac{1}{2} \boldsymbol{\omega} \cdot \mathbf{L} = \text{ constant} \]
Ya que\(\mathbf{L}\) es una constante para el movimiento sin par, y también se\(\boldsymbol{\omega}\) demostró que la magnitud de es constante, por lo tanto el ángulo entre estos dos vectores debe ser una constante para asegurar que también sea\(T_{\mathbf{rot}} = \frac{1}{2}\boldsymbol{\omega} \cdot \mathbf{L} = \) constante. Es decir,\(\mathbf{\omega}\) preceden alrededor\(\mathbf{L}\) en un ángulo constante\((\theta − \alpha )\) tal que la proyección de\(\boldsymbol{\omega}\) sobre\(\mathbf{L}\) es constante. Tenga en cuenta que
\[\boldsymbol{\omega} \times \widehat{\mathbf{e}_3} = \omega_2 \widehat{\mathbf{e}_1} − \omega_1\widehat{\mathbf{e}_2} \]
y, para un rotor simétrico,
\[\mathbf{L} \cdot \boldsymbol{\omega} \times \widehat{\mathbf{e}_3} = I_1\omega_1\omega_2 − I_2\omega_1\omega_2 = 0 \]
ya que\(I_1 = I_2\) para el rotor simétrico. Porque\(\mathbf{L} \cdot \boldsymbol{\omega} \times \widehat{\mathbf{e}_3} = 0\) para una parte superior simétrica entonces\(\mathbf{L}\),\(\boldsymbol{\omega}\) y\(\widehat{\mathbf{e}_3}\) son coplanares.
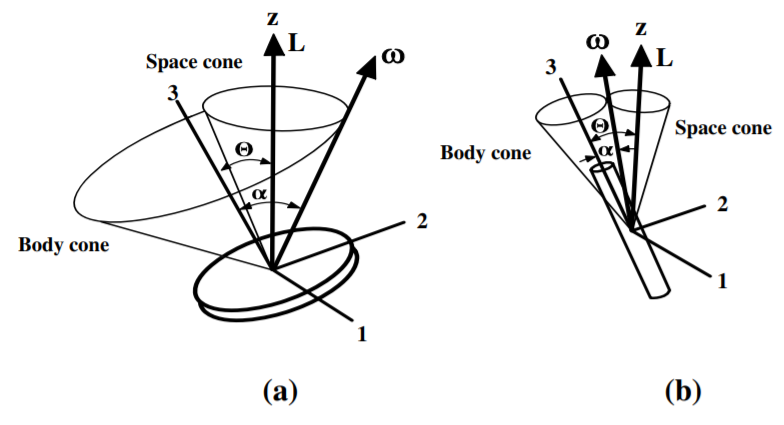
La figura\(\PageIndex{2}\) muestra la geometría del movimiento tanto para cuerpos oblatos como prolados deformados axialmente. Para un observador en el marco inercial fijo en el espacio, la velocidad angular\(\boldsymbol{\omega}\) traza un cono que precede con velocidad angular\(\Omega\) alrededor del\(\mathbf{L}\) eje fijo espacial llamado cono espacial. Para mayor comodidad, Figura\(\PageIndex{2}\) asume que\(\mathbf{L}\) y el\(\hat{\mathbf{z}}\) eje del marco inercial fijo en el espacio son colineales. La velocidad angular\(\boldsymbol{\omega}\) también traza el cono del cuerpo a medida que precede alrededor del\(\hat{\mathbf{e}}_3\) eje fijo al cuerpo. Dado que\(\mathbf{L}\),\(\boldsymbol{\omega}\) y\(\widehat{\mathbf{e}_3}\) son coplanares, entonces el\(\boldsymbol{\omega}\) vector está en la intersección de los conos de espacio y cuerpo a medida que el cono del cuerpo rueda alrededor del cono espacial. Es decir, los conos de espacio y cuerpo tienen una generatriz en común con la que coincide\(\boldsymbol{\omega}\). Como se muestra en la Figura\(\PageIndex{2b}\), para una aguja el cono del cuerpo parece rodar sin deslizarse en el exterior del cono espacial a la velocidad de precesión de\(\Omega = −\omega\). Por el contrario, como se muestra en la Figura\(\PageIndex{2a}\) para una parte superior simétrica oblata (en forma de disco) el cono espacial rueda dentro del cono del cuerpo y la precesión\(\Omega\) es más rápida que\(\omega\).
Dado que no hay pares externos que actúen para el movimiento sin par, entonces se conserva la magnitud y dirección del momento angular total. La descripción del movimiento se simplifica si\(\mathbf{L}\) se toma a lo largo del\(\hat{\mathbf{z}}\) eje fijo al espacio, entonces el ángulo de Euler\(\theta\) es el ángulo entre el vector base fijo al cuerpo\(\hat{\mathbf{e}}_3\) y el vector base fijo al espacio\(\hat{\mathbf{z}}\). Si en algún instante en el marco de la carrocería, se supone que\(\widehat{\mathbf{e}_2}\) está alineado en el plano de\(\mathbf{L}\),\(\boldsymbol{\omega}\) y\(\widehat{\mathbf{e}_3}\), entonces
\[L_1 = 0 \quad L_2 = L \sin \theta \quad L_3 = L\cos \theta \label{13.126}\]
Si\(\alpha\) es el ángulo entre la velocidad angular\(\boldsymbol{\omega}\) y el\(\hat{\mathbf{e}}_3\) eje fijo del cuerpo, entonces en el mismo instante
\[\omega_1 = 0 \quad \omega_2 = \omega \sin \alpha \quad \omega_3 = \omega \cos \alpha \label{12.127}\]
Los componentes del momento angular también se pueden derivar de\(\mathbf{L} = \mathbf{I} \cdot \boldsymbol{\omega}\) para dar
\[L_1 = I_1\omega_1 = 0 \quad L_2 = I_2 \omega_2 = I_1\omega \sin \alpha \quad L_3 = I_3\omega_3 = I_3\omega \cos \alpha \label{13.128}\]
Las ecuaciones\ ref {13.126} y\ ref {13.128} dan dos relaciones para la relación\(\frac{L_2}{L_3}\), es decir,
\[\frac{L_2}{L_3} = \tan \theta = \frac{I_1}{I_3} \tan \alpha \label{13.129}\]
Para un esferoide prolado\(I_1 > I_3\) por lo tanto\(\theta > \alpha\) mientras\(\Omega\) y\(\omega_3\) tienen signos opuestos.
Para un esferoide oblato\(I_1 < I_3\) por lo tanto\(\alpha > \theta\) mientras\(\Omega\) y\(\omega_3\) tienen el mismo signo.
El sentido de precesión se puede entender si el cono del cuerpo rueda sin deslizarse en el exterior del cono espacial con\(\Omega\) la orientación opuesta a\(\omega\) para el caso del prolado, mientras que para el caso oblato el cono espacial rueda dentro del cono del cuerpo con\(\Omega\) y\(\omega\) orientado en direcciones similares. Observe de\ ref {13.129} que\(\theta = 0\) si\(\alpha = 0\), es decir\(\mathbf{L}\),\(\boldsymbol{\omega}\) y los\(\mathbf{3}\) ejes están alineados correspondientes a un eje principal. De igual manera\(\alpha = 90^{\circ}\),\(\theta = 90^{\circ}\) si, entonces nuevamente\(\mathbf{L}\) y\(\boldsymbol{\omega}\) se alinean correspondientes a ellos siendo ejes principales.
La mecánica lagrangiana se ha utilizado para calcular el movimiento con respecto al sistema de eje principal fijo al cuerpo. Sin embargo, el movimiento necesita ser conocido en relación con el marco inercial fijo en el espacio donde se observa el movimiento. Esta transformación se puede hacer usando la siguiente relación
\[\left(\frac{d \hat{\mathbf{e}}_3}{dt}\right)_{space} = \left(\frac{d\hat{\mathbf{e}}_3}{dt} \right)_{body} + \boldsymbol{\omega} \times \hat{\mathbf{e}}_3 = \boldsymbol{\omega} \times \hat{\mathbf{e}}_3 \]
ya que el vector unitario\(\hat{\mathbf{e}}_3\) es estacionario en el marco fijo al cuerpo. El producto vectorial de\(\boldsymbol{\omega} \times \hat{\mathbf{e}}_3\) y\(\hat{\mathbf{e}}_3\) da
\[\begin{align*} \hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} &= \hat{\mathbf{e}}_3 \times \boldsymbol{\omega} \times \hat{\mathbf{e}}_3 \\[4pt] &= (\hat{\mathbf{e}}_3 \cdot \hat{\mathbf{e}}_3) \boldsymbol{\omega} − (\hat{\mathbf{e}}_3 \cdot \boldsymbol{\omega} ) \hat{\mathbf{e}}_3 = \boldsymbol{\omega} − \omega_3 \hat{\mathbf{e}}_3 \end{align*}\]
por lo tanto
\[\boldsymbol{\omega} = \hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} + \omega_3\hat{\mathbf{e}}_3 \label{13.131}\]
El momento angular es igual\(\mathbf{L} = \{\mathbf{I}\} \cdot \boldsymbol{\omega}\). Dado que\(\hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} \) es perpendicular al\(\hat{\mathbf{e}}_3\) eje, entonces para el caso con\(I_1 = I_2\),
\[\mathbf{L} =I_1\hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} + I_3\omega_3\hat{\mathbf{e}}_3 \label{13.132}\]
Así, el momento angular para un rotor rígido simétrico sin par comprende dos componentes, siendo uno el componente perpendicular que precede alrededor\(\hat{\mathbf{e}}_3\), y el otro es\(L_3\).
En el marco de espacio fijo supongamos que el\(\hat{\mathbf{z}}\) eje es colineal con\(\mathbf{L}\). Luego tomando el producto escalar de\(\hat{\mathbf{e}}_3\) y\(\mathbf{L}\), usando la ecuación\ ref {13.126} da
\[\begin{align} L_3 &= \hat{\mathbf{e}}_3 \cdot \mathbf{L} \\[4pt] &=I_1\hat{\mathbf{e}}_3 \cdot \hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} + I_3\omega_3\hat{\mathbf{e}}_3 \cdot \hat{\mathbf{e}}_3 \label{13.133}\end{align}\]
El primer término a la derecha es cero y así Ecuación\ ref {13.133} y\ ref {13.126} dan
\[L_3 = I_3\omega_3 = L \cos \theta \]
La dependencia temporal de la rotación del eje de simetría fijo al cuerpo con respecto al sistema de eje fijo en el espacio se puede obtener tomando el producto vectorial\(\hat{\mathbf{e}}_3 \times \mathbf{L}\) usando la Ecuación\ ref {13.132} y usando la ecuación\(B.24\) para expandir el producto de triple vector,
\[\begin{align} \hat{\mathbf{e}}_3 \times \mathbf{L} &= I_1\hat{\mathbf{e}}_3 \times \left( \hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space}\right) + I_3\omega_3\hat{\mathbf{e}}_3 \times \hat{\mathbf{e}}_3 \label{13.135} \\[4pt] \notag &= I_1 \left[\left( \hat{\mathbf{e}}_3 \cdot \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} \right) \hat{\mathbf{e}}_3 − (\hat{\mathbf{e}}_3 \cdot \hat{\mathbf{e}}_3) \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space}\right] + 0 \end{align}\]
ya que\((\hat{\mathbf{e}}_3 \times \hat{\mathbf{e}}_3)=0\). Además\((\hat{\mathbf{e}}_3 \cdot \hat{\mathbf{e}}_3)=1\), y\(\hat{\mathbf{e}}_3 \cdot \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space}= 0\), como son perpendiculares, entonces
\[\left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} = \frac{\mathbf{L}}{I_1} \times \hat{\mathbf{e}}_3 \label{13.136}\]
Esta ecuación muestra que el eje de simetría fijo al cuerpo\(\hat{\mathbf{e}}_3\) precede alrededor del\(\mathbf{L}\), donde\(\mathbf{L}\) es una constante de movimiento para una rotación sin par. La verdadera velocidad angular rotacional\(\boldsymbol{\omega}\) en el marco fijo en el espacio, dada por las ecuaciones\ ref {13.131}, se puede evaluar usando la Ecuación\ ref {13.136}. Recordando que se asumió que\(\mathbf{L}\) está en la\(\hat{\mathbf{z}}\) dirección, es decir\(\mathbf{L} =L\hat{\mathbf{z}}\), entonces
\[\begin{align} \notag \boldsymbol{\omega} &= \hat{\mathbf{e}}_3 \times \left(\frac{d\hat{\mathbf{e}}_3}{dt}\right)_{space} + \omega_3\hat{\mathbf{e}}_3 \\[4pt] \notag &= \frac{L}{I_1} \hat{\mathbf{e}}_3 \times (\hat{\mathbf{z}} \times \hat{\mathbf{e}}_3) + \left( \frac{L \cos \alpha}{ I_3} \right) \hat{\mathbf{e}}_3 \\[4pt] &= \frac{L}{ I_1} \hat{\mathbf{z}} + L \cos \alpha \left( \frac{I_1 − I_3}{ I_1I_3}\right) \hat{\mathbf{e}}_3 \end{align}\]
Es decir, el eje de simetría del rotor rígido axialmente simétrico forma un ángulo\(\theta\) con el vector de momento angular\(L\hat{\mathbf{z}}\) y precede alrededor\(L\hat{\mathbf{z}}\) con una velocidad angular constante\(\frac{L}{I_1}\) mientras que el giro axial del cuerpo rígido tiene un valor constante\(\frac{L}{I_3}\). Así, en el marco de precesión, el cuerpo rígido parece girar alrededor de su eje de simetría fijo con una velocidad angular constante\(\frac{L \cos \alpha}{I_3} − \frac{L \cos \alpha}{I_1} = L \cos \alpha \left(\frac{I_1−I_3}{I_1 I_3}\right)\). La precesión del eje de simetría parece una oscilación superpuesta sobre el movimiento giratorio alrededor del eje de simetría fijado al cuerpo. La tasa de precesión angular en el marco fijo en el espacio se puede deducir usando el hecho de que
\[\dot{\phi} \sin \theta = \omega \sin \alpha \label{13.138}\]
Luego, usando la ecuación\ ref {13.129} permite que la ecuación\ ref {13.138} se escriba como
\[\dot{\phi} = \omega \sqrt{\left[ 1 + \left(\left(\frac{I_3}{I_1}\right)^2 -1 \right) \cos^2 \alpha \right] }\]
que da la tasa de precesión alrededor del eje fijo al espacio en términos de la velocidad angular\(\omega \). Tenga en cuenta que la tasa de precesión\(\dot{\phi} > \omega\) si\(\frac{I_3}{I_1} > 1\), es decir, para formas oblatas, y\(\dot{\phi} < \omega\) si\(\frac{I_3}{I_1} < 1\), es decir, para formas proladas.
Ecuaciones de movimiento de Lagrange
Es interesante comparar las ecuaciones de movimiento para la rotación sin par de un rotor rígido inertialmente simétrico derivado utilizando la mecánica de Lagrange con la derivada previamente usando ecuaciones de Euler basadas en mecánica newtoniana. Supongamos que los momentos principales sobre el punto fijo de la parte superior simétrica son\(I_1 = I_2 \neq I_3\) y que la energía cinética es igual a la energía cinética rotacional, es decir, se supone que la energía cinética traslacional\(T_{trans} = 0\). Entonces la energía cinética viene dada por
\[T =\frac{1}{2} \sum_i I_i \omega^2_i =\frac{1}{2}I_1 ( \omega^2_1 + \omega^2_2 ) +\frac{1}{2}I_3\omega^2_3 \]
Ecuaciones\((13.14.1-13.14.3)\) para el marco fijo al cuerpo dan
\[\omega^2_1 = \left( \dot{\phi} \sin \theta \sin\psi + \dot{\theta} \cos \psi \right)^2 = \dot{\phi}^2 \sin^2 \theta \sin^2 \psi + 2 \phi \dot{\theta} \sin \theta \sin\psi \cos \psi + \dot{\theta}^2 \cos^2 \psi \]
\[\omega^2_2 = \left( \dot{\phi} \sin \theta \cos \psi − \dot{\theta} \sin\psi \right)^2 = \dot{\phi}^2 \sin^2 \theta \cos^2 \psi − 2\phi \dot{\theta} \sin \theta \sin\psi \cos \psi + \dot{\theta}^2 \sin^2 \psi \]
Por lo tanto
\[\omega^2_1 + \omega^2_2 = \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \]
y
\[\omega^2_3 = \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 \]
Por lo tanto, la energía cinética es
\[T =\frac{1}{2}I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2\right) +\frac{1}{2}I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 \]
Dado que el sistema está libre de par, se\(U\) puede suponer que la energía potencial escalar es cero, y luego la lagrangiana es igual
\[L =\frac{1}{2}I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2\right) +\frac{1}{2}I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 \]
El momento angular alrededor del\(z\) eje fijo en el espacio\(p_{\phi}\) se conjuga con\(\phi\). De las ecuaciones de Lagrange
\[\dot{p}_{\phi} = \frac{\partial L}{ \partial \phi } = 0 \]
es decir, el momento angular alrededor del\(z\) eje fijo en el espacio,\(p_{\phi}\) es una constante de movimiento dada por
\[p_{\phi} = \frac{\partial L}{ \partial \dot{\phi}} = ( I_1 \sin^2 \theta + I_3 \cos^2 \theta ) \dot{\phi} + I_3\dot{\psi} \cos \theta = \text{ constant.}\]
De manera similar, el momento angular alrededor del\(3\) eje fijo al cuerpo se conjuga con\(\psi\). De las ecuaciones de Lagrange
\[\dot{p}_{\psi} = \frac{\partial L}{\partial \psi } = 0 \]
es decir,\(p_{\psi}\) es una constante de movimiento dada por
\[p_{\psi} = \frac{\partial L}{ \partial \dot{\psi}} = I_3 \left( \dot{\dot{\phi}} \cos \theta + \dot{\psi} \right) = I_3\omega_3 = \text{ constant}\]
Las dos relaciones anteriores derivadas del Lagrangiano se pueden resolver para dar la velocidad angular de precesión\(\dot{\phi}\) alrededor del\(\hat{\mathbf{z}}\) eje fijo al espacio
\[\dot{\phi} = \frac{p_{\phi} − p_{\psi} \cos \theta}{I_1 \sin^2 \theta} \]
y el giro alrededor del\(\mathbf{\hat{3}}\) eje fijo al cuerpo\(\dot{\psi}\) que viene dado por
\[\dot{\psi} = \frac{p_{\psi}}{I_3} − \frac{(p_{\phi} − p_{\psi} \cos \theta ) \cos \theta}{ I_1 \sin^2 \theta}\]
Dado que\(p_{\phi}\) y\(p_{\psi}\) son constantes de movimiento, entonces la velocidad angular precessional\(\dot{\phi}\) alrededor del\(\hat{\mathbf{z}}\) eje fijo al espacio, y la velocidad angular de giro\(\dot{\psi}\), que es la frecuencia de giro alrededor del\(\mathbf{\hat{3}}\) eje fijo al cuerpo, son constantes que dependen directamente de\(I_1\), \(I_3\). y\(\theta\).
Hay una constante adicional de movimiento disponible si no actúan fuerzas disipativas sobre el sistema, es decir, conservación de energía lo que implica que la energía total
\[E =\frac{1}{2}I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \right) +\frac{1}{2}I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 \]
será una constante de movimiento. Pero el segundo término en el lado derecho también es una constante de movimiento ya que\(p_{\psi}\) y\(I_3\) ambos son constantes, es decir
\[\frac{1}{2} I_3\omega^2_3 =\frac{1}{2}I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 = \frac{p^2_{\psi}}{I_3 } = \text{ constant}\]
Así, la conservación de energía implica que el primer término en el lado derecho también debe ser una constante dada por
\[\frac{1}{2} I_1 ( \omega^2_1 + \omega^2_2 ) =\frac{1}{2}I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \right) = E - \frac{p^2_{\psi}}{I_3 } = \text{ constant }\]
Estos resultados son idénticos a los dados en las ecuaciones\ ref {13.120} y\ ref {13.121} que se derivaron usando ecuaciones de Euler. Estos resultados ilustran que la física subyacente del rotor rígido sin par de torsión se extrae más fácilmente usando mecánica lagrangiana en lugar de usar el enfoque de ángulo Euler de la mecánica newtoniana.
Ejemplo\(\PageIndex{1}\): Precession rate for torque-free rotating symmetric rigid rotor
La tabla\(\PageIndex{1}\) enumera las velocidades angulares de precesión y giro, en el marco fijo en el espacio, para la rotación sin par de tres geometrías simétricas extremas que giran con momento angular constante\(\omega\) cuando el movimiento está ligeramente perturbado de tal manera que\(\omega\) está en un ángulo pequeño con respecto\(\alpha\) al eje de simetría. Obsérvese que esto asume el teorema del eje perpendicular, ecuación\((13.9.1)\) que establece que para una delgada lámina\(I_1 + I_2 = I_3\) dando, para un disco circular delgado,\(I_1 = I_2\) y así\(I_3 = 2I_1\).
| Forma simétrica de cuerpo rígido | Relación momento principal\(\frac{I_3}{I_1}\) | Tasa de precesión\(\dot{\phi}\) | Tasa de giro\(\dot{\psi}\) |
|---|---|---|---|
| Aguja simétrica | \ (\ frac {I_3} {I_1}\) ">0 | \ (\ punto {\ phi}\) ">0 | \ (\ punto {\ psi}\) ">\(\omega\) |
| Esfera | \ (\ frac {I_3} {I_1}\) ">1 | \ (\ punto {\ phi}\) ">\(\omega\) | \ (\ punto {\ psi}\) ">0 |
| Disco circular delgado | \ (\ frac {I_3} {I_1}\) ">2 | \ (\ punto {\ phi}\) ">\(2\omega\) | \ (\ punto {\ psi}\) ">\(-\omega\) |
La velocidad angular de precesión en el marco espacial varía entre 0 y\(2\omega\) dependiendo de si la velocidad angular de giro fija al cuerpo está alineada o antialineada con la frecuencia de rotación\(\omega\). Para un esferoide prolado extremo\(\frac{I_3}{I_1} = 0\), la velocidad angular de giro fija al cuerpo\(\Omega = −\omega_3\) que cancela la velocidad angular\(\omega\) del marco giratorio, lo que resulta en una velocidad angular de precesión cero del\(\hat{\mathbf{e}}_3\) eje fijo al cuerpo alrededor del marco fijo en el espacio. El giro\(\Omega = 0\) en el marco fijo al cuerpo para la esfera rígida y\(\frac{I_3}{I_1} = 1\), por lo tanto, la tasa de precesión del\(\hat{e}_3\) eje fijo al cuerpo de la esfera alrededor del marco fijo en el espacio es igual\(\omega\). Para esferoides oblatos y discos delgados, como un frisbee,\(\frac{I_3}{I_1} = 2\) haciendo la precesión fija al cuerpo la velocidad angular\(\Omega = +\omega\) que se suma a la velocidad angular\(\omega\) y aumenta la tasa de precesión hasta\(2\omega\) como se ve en el marco fijo al espacio. Esto ilustra que la velocidad angular de giro puede sumar constructiva o destructivamente con la velocidad angular\(\omega \). 2
2 En su autobiografía Seguramente estás bromeando el señor Feynman, escribió "Estaba en la cafetería [Cornell] y algún tipo, haciendo el tonto, arroja un plato al aire. Al subir la placa en el aire la vi tambalearse, y noté que el medallón rojo de Cornell en el plato dando vueltas. Para mí era bastante obvio que el medallón daba vueltas más rápido que el bamboleo. Empecé a averiguar el movimiento de la placa giratoria. Descubrí que cuando el ángulo es muy leve, el medallón gira el doble de rápido que la tasa de bamboleo. ¡Salió de una ecuación muy complicada!”. La relación cotizada\((2 : 1)\) es incorrecta, debería serlo\((1 : 2)\). Benjamin Chao en Física Hoy de febrero de 1989 especuló que el error de Feynman al invertir el factor de dos podría ser “acorde con el espíritu del autor y del libro, otra broma práctica destinada a quienes hacen física sin experimentar”. Señaló que esta historia ocurrió en la página 157 de un libro de 314 páginas de longitud\((1:2)\). Observe la dependencia de la relación entre la oscilación y las velocidades angulares de rotación en el ángulo de inclinación\(\theta\).