
13.21: Rotación sin par de un rotor rígido asimétrico
- Page ID
- 126395
Las ecuaciones de movimiento de Euler para el caso de rotación sin par de un rotor rígido asimétrico (triaxial) alrededor del centro de masa, con momentos principales de inercia\(I_1 \neq I_2 \neq I_3\), conducen a un movimiento más complicado que para el rotor rígido simétrico. 3 Las características generales del movimiento del rotor asimétrico se pueden deducir utilizando la conservación del momento angular y la energía cinética rotacional.
Suponiendo que los pares externos son cero, entonces las ecuaciones de movimiento de Euler pueden escribirse como
\[\begin{align} I_1\dot{\omega}_1 = (I_2 − I_3) \omega_2\omega_3 \label{13.156}\\ I_2\dot{\omega}_2 = (I_3 − I_1) \omega_3\omega_1 \notag \\ I_3\dot{\omega}_3 = (I_1 − I_2) \omega_1\omega_2 \notag \end{align}\]
Desde\(L_i = I_i\omega_i\) para\(i = 1, 2, 3\), entonces Ecuación\ ref {13.156} da
\[\begin{align}I_2I_3\dot{L}_1 = (I_2 − I_3)L_2L_3 \label{13.157} \\ I_1I_3\dot{L}_2 = (I_3 − I_1)L_3L_1 \notag \\ I_1I_2 \dot{L}_3 = (I_1 − I_2)L_1L_2 \notag \end{align}\]
Multiplica la primera ecuación por\(I_1L_1\), la segunda por\(I_2L_2\) y la tercera por\(I_3L_3\) y suma, lo que da
\[I_1I_2I_3 \left( L_1\dot{L}_1 + L_2\dot{L}_2 + L_3\dot{L}_3 \right) = 0 \label{13.158}\]
El soporte es equivalente a\(\frac{d}{dt} (L^2_1 + L^2_2 + L^2_3)=0\) lo que implica que el momento angular rotacional total\(L\) es una constante de movimiento como se esperaba para este sistema sin par, aunque los componentes individuales\(L_1, L_2, L_3\) pueden variar. Eso es
\[L^2_1 + L^2_2 + L^2_3 = L^2 \label{13.159}\]
Tenga en cuenta que la ecuación\ ref {13.159} es la ecuación de una esfera de radio\(L\).
Multiplica la primera ecuación de\ ref {13.157} por\(L_1\), la segunda por\(L_2\), y la tercera por\(L_3\), y suma da
\[I_2I_3L_1\dot{L}_1 + I_1I_3L_2\dot{L}_2 + I_1I_2L_3\dot{L}_3 = 0 \label{13.160}\]
Divide\ ref {13.160} por\(I_1I_2I_3\) da\(\frac{d}{dt}( \frac{L^2_1}{2I_1} + \frac{L^2_2}{ 2I_2} + \frac{L^2_3}{2I_3} )=0\). Esto implica que la energía cinética rotacional total\(T\), dada por
\[\frac{L^2_1}{2I_1} + \frac{L^2_2}{2I_2} + \frac{L^2_3}{2I_3} = T \label{13.161}\]
es una constante de movimiento como se esperaba cuando no hay pares externos y cero disipación de energía. Tenga en cuenta que\ ref {13.161} es la ecuación de un elipsoide.
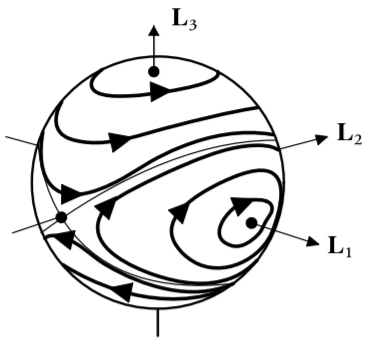
Las ecuaciones\ ref {13.159} y\ ref {13.161} ambas deben ser satisfechas por el movimiento rotacional para cualquier valor del momento angular total\(\mathbf{L}\) y energía cinética\(T\). La figura\(\PageIndex{1}\) muestra una representación gráfica de la intersección de la\(L\) esfera y el\(T\) elipsoide tal como se ve en el marco fijo al cuerpo. El vector de momento angular\(\mathbf{L}\) debe seguir los contornos de energía constante dados por donde los\(T\) -elipsoides se cruzan con la\(L\) -esfera, mostrados para el caso donde\(I_3 > I_2 > I_1\). Obsérvese que la precesión del vector de momento angular\(\mathbf{L}\) sigue una trayectoria que tiene trayectorias cerradas que circulan alrededor del eje principal con el más pequeño\(I\), es decir\(\hat{\mathbf{e}}_1\), o el eje principal con el máximo\(I\), es decir,\(\hat{\mathbf{e}}_3\). Sin embargo, el vector de momento angular no tiene un mínimo estable para precesión alrededor del eje de momento principal intermedio de inercia\(\hat{\mathbf{e}}_2\). Además de la precesión, el vector de momento angular\(\mathbf{L}\) ejecuta la nutación, es decir, un asentimiento del ángulo\(\theta\). Para cualquier valor fijo de\(L\), la energía cinética tiene límites superior e inferior dados por
\[\frac{L^2}{2I_3} \leq T \leq \frac{L^2}{2I_1} \label{13.162}\]
Así, para un valor dado de\(L\), cuándo\(T = T_{\text{min}} = \frac{L^2}{2I_3}\), la orientación de\(\mathbf{L}\) en el marco fijo al cuerpo es\((0, 0, +L)\) o\((0, 0, −L)\), es decir, alineada con el\(\hat{\mathbf{e}}_3\) eje a lo largo del cual el momento principal de inercia es mayor. Para una energía cinética ligeramente mayor, la trayectoria de\(L\) sigue caminos cerrados precediendo alrededor\(\hat{\mathbf{e}}_3\). Cuando la energía cinética,\(T = \frac{L^2_2}{2I_2}\) el vector de momento angular\(L\) sigue cualquiera de las dos trayectorias delgadas, cada una de las cuales es una separatriz. Estos no tienen órbitas cerradas alrededor\(\hat{\mathbf{e}}_2\) y separan las soluciones cerradas alrededor de cualquiera\(\hat{\mathbf{e}}_3\) o\(\hat{\mathbf{e}}_1\). Para mayor energía cinética, el vector de momento angular de precesión sigue trayectorias cerradas alrededor\(\hat{\mathbf{e}}_1\) y se\(\hat{\mathbf{e}}_1\) alinea completamente con la energía cinética del límite superior.
Tenga en cuenta que para el caso especial cuando\(I_3 > I_2 = I_1\), entonces el rotor rígido asimétrico es igual al rotor rígido simétrico para el cual las soluciones de las ecuaciones de Euler se resolvieron exactamente en capítulo\(13.19\). Para el rotor rígido simétrico el\(T\) -elipsoide se convierte en un esferoide alineado con el eje de simetría y así las intersecciones con la\(L\) esfera conducen a trayectorias circulares alrededor del eje principal\(\hat{\mathbf{e}}_3\) fijo al cuerpo, mientras que la separatriz rodea el ecuador correspondiente al\(\hat{\mathbf{e}}_3\) eje separando la precesión en sentido horario y antihorario sobre\(\mathbf{L}_3\). Esta discusión muestra que la energía, más la conservación del momento angular, proporcionan las características generales de la solución para la parte superior simétrica sin par que están de acuerdo con las derivadas usando las ecuaciones de movimiento de Euler.
3 Discusiones similares de la parte superior asimétrica de rotación libre las dan Landau y Lifshitz [La60] y Gregory [Gr06].