
13.22: Estabilidad de rotación sin par de torsión de un cuerpo asimétrico
- Page ID
- 126414
Es de interés extender la discusión previa para abordar la estabilidad de un rotor rígido asimétrico sometido a rotación libre de fuerza cerca de un eje principal, es decir, cuando está sujeto a pequeñas perturbaciones. Considerar el caso de un cuerpo rígido asimétrico general con\(I_3 > I_2 > I_1\). Que el sistema comience con la rotación alrededor del\(\hat{\mathbf{e}}_1\) eje, es decir, el eje principal asociado con el momento de inercia\(I_1\). Entonces
\[\boldsymbol{\omega} = \omega_1 \widehat{\mathbf{e}}_1 \]
Considera que se aplica una pequeña perturbación haciendo que el vector de velocidad angular sea
\[\boldsymbol{\omega} =\omega_1 \widehat{\mathbf{e}}_1 + \lambda \widehat{\mathbf{e}}_2 + \mu \widehat{\mathbf{e}}_3 \]
donde\(\lambda , \mu\) son muy pequeños. Las ecuaciones de Euler\((13.21.1)\) se convierten en
\[\begin{aligned} (I_2 − I_3) \lambda \mu − I_1\dot{\omega}_1 = 0 \\(I_3 − I_1) \mu \omega_1 − I_2\dot{\lambda} = 0 \\(I_1 − I_2) \omega_1 \lambda − I_3 \dot{\mu} = 0 \end{aligned}\]
Suponiendo que el producto\(\lambda \mu\) en la primera ecuación es despreciable, entonces\(\dot{\omega}_1 = 0\), es decir,\(\omega_1\) es constante.
Las otras dos ecuaciones se pueden resolver para dar
\[\dot{\lambda} = \left(\frac{(I_3 − I_1)}{ I_2} \omega_1 \right) \mu \]
\[\dot{\mu} = \left(\frac{(I_1 − I_2)}{ I_3} \omega_1 \right) \lambda \]
Tómese el tiempo derivado de la primera ecuación
\[\ddot{\lambda} = \left(\frac{(I_3 − I_1)}{ I_2} \omega_1 \right) \dot{\mu} \]
y sustituto de\(\dot{\mu}\) da
\[\ddot{\lambda} + \left(\frac{(I_1 − I_3) (I_1 − I_2)}{ I_2I_3} \omega^2_1 \right) \lambda = 0 \]
La solución de esta ecuación es
\[\lambda (t) = Ae^{i\Omega_{1\lambda}t} + Be^{-i\Omega_{1\lambda}t}\]
donde
\[\Omega_{1\lambda} = \omega_1 \sqrt{\frac{(I_1 − I_3) (I_1 − I_2)}{I_2I_3}} \]
Tenga en cuenta que como se asumió que\(I_3 > I_2 > I_1\), entonces\(\Omega_{1\lambda}\) es real. La solución para\(\lambda (t) \) por lo tanto representa un movimiento oscilatorio estable con frecuencia de precesión\(\Omega_{1\lambda}\). El resultado idéntico se obtiene para\(\Omega_{1\mu} = \Omega_{1\lambda} = \Omega_1\). Así, el movimiento corresponde a un mínimo estable alrededor del\(\hat{\mathbf{e}}_1\) eje con oscilaciones alrededor del\(\lambda = \mu = 0\) mínimo con periodo.
\[\Omega_1 = \omega_1 \sqrt{\frac{ (I_1 − I_3) (I_1 − I_2)}{ I_2I_3}} \label{13.171}\]
Permutar los índices da que para las perturbaciones aplicadas a la rotación alrededor de los 2 o 3 ejes dan frecuencias de precesión
\[\Omega_2 = \omega_2 \sqrt{\frac{ (I_2 − I_1) (I_2 − I_3) }{I_1I_3}} \]
\[\Omega_3 = \omega_3 \sqrt{\frac{ (I_3 − I_2) (I_3 − I_1) }{I_1I_2 }} \label{13.173}\]
Desde\(I_3 > I_2 > I_1\) entonces\(\Omega_1\) y\(\Omega_3\) son reales mientras que\(\Omega_2\) es imaginario. Así, mientras que la rotación alrededor del eje\(I_3\) o los\(I_1\) ejes es estable, la solución imaginaria aproximadamente\(\hat{\mathbf{e}}_2\) corresponde a una perturbación que aumenta con el tiempo. Así, solo la rotación alrededor de los momentos de inercia más grandes o más pequeños son estables. Además para el rotor rígido simétrico, con\(I_1 = I_2 \neq I_3\), la estabilidad existe solo alrededor del eje de simetría\(\hat{\mathbf{e}}_3\) independientemente de si el cuerpo es prolado u oblato. Este resultado quedó implícito a partir de la discusión sobre la conservación de energía y momento angular en el capítulo\(13.20\). La fricción no se incluyó en la discusión anterior. Ante la presencia de fuerzas disipativas, como fricción o arrastre, solo es estable la rotación alrededor del eje principal correspondiente al momento máximo de inercia.
La estabilidad de la rotación de cuerpos rígidos tiene amplias aplicaciones a la rotación de satélites, moléculas y núcleos. El primer satélite estadounidense, Explorer 1, fue lanzado en 1958 con el eje de rotación alineado con el eje cilíndrico que era el momento principal mínimo de inercia. Después de unas horas el satélite comenzó a caer con amplitud creciente debido a que una antena flexible disipó y transfirió energía al eje perpendicular el cual tuvo el mayor momento de inercia. El movimiento sin par de torsión de un cuerpo rígido deformado es un fenómeno ubicuo en muchas ramas de la ciencia, la ingeniería y el deporte, como se ilustra en los siguientes ejemplos.
Ejemplo\(\PageIndex{1}\): Tennis racquet dynamics
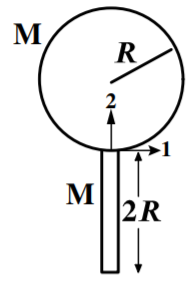
Una raqueta de tenis es un cuerpo asimétrico que exhibe el comportamiento rotacional anterior. Supongamos que la cabeza de una raqueta de tenis es un disco circular delgado\(R\) y uniforme de radio y masa\(M\) que está unido a un mango cilíndrico de diámetro\(r = \frac{R}{10}\)\(2R\), longitud y masa\(M\) como se muestra en la figura. Los principales momentos de inercia alrededor de los tres ejes a través del centro de masa se pueden calcular mediante la adición de los momentos para el disco circular y el mango cilíndrico y utilizando tanto el teorema del eje paralelo como el eje perpendicular.
| Eje | Cabeza | Asa | Raqueta |
|---|---|---|---|
| 1 | \(\frac{1}{4} MR^2+MR^2= \frac{5}{4} MR^2\) | \(\frac{4}{3} MR^2\) | \(\frac{31}{12} MR^2\) |
| 2 | \(\frac{1}{4} MR^2+0= \frac{1}{4} MR^2\) | \(\frac{1}{200} MR^2\) | \(\frac{51}{200} MR^2\) |
| 3 | \(\frac{1}{2} MR^2+MR^2= \frac{3}{2} MR^2\) | \(\frac{4}{3} MR^2\) | \(\frac{17}{6} MR^2\) |
Tenga en cuenta que\(I_{11} : I_{22} : I_{33} = 2.5833 : 0.2550 : 2.8333\). Insertar estos momentos principales de inercia en ecuaciones\ ref {13.171} -\ ref {13.173} da las siguientes frecuencias de precesión
\[\Omega_1= i0 .8976\omega_1 \quad \Omega_2= 0 .9056\omega_2 \quad \Omega_3= 0 .9892\omega_3 \notag \]
La frecuencia imaginaria de precesión\(\Omega_1\) alrededor del eje 1 implica una rotación inestable que conduce al volteo, mientras que el momento mínimo\(I_{22}\) y el momento máximo\(I_{33}\) implican una rotación estable alrededor de los ejes 2 y 3. Este comportamiento rotacional se demuestra fácilmente lanzando una raqueta de tenis y se llama teorema de raqueta de tenis. El centro de percusión, ejemplo\(2.12.8\) es otra propiedad inercial importante de una raqueta de tenis.
Ejemplo\(\PageIndex{2}\): Rotation of asymmetrically-deformed nuclei
Algunos núcleos y moléculas tienen formas promedio que tienen una deformación asimétrica significativa que conduce a interesantes análogos cuánticos de las propiedades rotacionales de un cuerpo rígido asimétricamente deformado. La principal diferencia entre un rotor cuántico y un rotor clásico es que las energías y el momento angular se cuantifican, en lugar de ser cantidades continuamente variables. De lo contrario, los rotores cuantales exhiben características generales similares al análogo clásico. Los estudios [Cli86] del comportamiento rotacional de núcleos asimétricamente deformados explotan tres aspectos de la mecánica clásica, a saber, las trayectorias clásicas de Coulomb, las invariantes rotacionales y las propiedades de los cuerpos rígidos elipsoidales.
La deformación elipsoidal se puede especificar por las dimensiones a lo largo de cada uno de los tres ejes principales. Bohr y Mottelson parametrizaron la deformación elipsoidal en términos de tres parámetros,\(R_0\) que es el radio de la esfera equivalente,\(\beta \) que es una medida de la magnitud de la deformación elipsoidal de la esfera, y\(\gamma\) que especifica la desviación de la forma respecto a la axial simetría. La forma intrínseca elipsoidal se puede expresar en términos de la desviación de la esfera equivalente por la ecuación
\[\delta R(\theta , \phi ) = R(\theta , \phi ) − R_0 = R_0 \sum^{\mu +2}_{ \mu =−2} \alpha^*_{2 \mu} Y_{2 \mu} (\theta , \phi ) \label{alpha} \tag{a}\]
donde\(Y_{\lambda \mu} (\theta , \phi )\) es un armónico esférico de Laplace definido como
\[Y_{\lambda \mu} (\theta , \phi ) = \sqrt{\frac{ (2\lambda + 1) }{4\pi}\frac{ (\lambda − \mu )!}{ (\lambda + \mu )!}} P_{\lambda \mu} (\cos \theta )e^{-i\mu \phi} \notag\]
y\(P_{\lambda \mu} (\cos \theta )\) es una función asociada de Legendre de\(\cos \theta\). Los armónicos esféricos son la porción angular de un conjunto de soluciones a la ecuación de Laplace. Representados en un sistema de coordenadas esféricas, los armónicos esféricos de Laplace\(Y_{\lambda \mu }(\theta , \phi )\) son un conjunto específico de armónicos esféricos que forman un sistema ortogonal. Los armónicos esféricos son importantes en muchas aplicaciones teóricas y prácticas.
En el marco del eje principal del cuerpo, hay tres parámetros de deformación cuadrupolo distintos de cero que se pueden escribir en términos de los parámetros de deformación\(\beta , \gamma\) donde\(\alpha_{20} = \beta \cos \gamma \),\(\alpha_{21} = \alpha_{2−1} = 0\), y\(\alpha_{22} = \alpha_{2−2} = \frac{1}{\sqrt{2}}\beta \sin \gamma \). Usando estos en ecuaciones\ ref {alpha} dar las tres dimensiones de semieje en el marco del eje principal, (marco cebado),
\[\delta R_k = \sqrt{\frac{5}{4\pi}} R_0\beta \cos (\gamma − \frac{2\pi k}{ 3 } ) \label{b1} \tag{b}\]
Tenga en cuenta que para\(\gamma = 0\), entonces\(\delta R_1 = \delta R_2 = −\frac{1}{2} \sqrt{\frac{5}{4\pi}} R_0\beta\) mientras\(\delta R_3 = +\sqrt{\frac{5}{ 4\pi}} R_0\beta\), es decir el cuerpo tiene deformación prolata con el eje de simetría a lo largo del eje 3. Se obtiene la misma forma de prolado para\(\gamma = \frac{2\pi}{ 3}\) y\(\gamma = \frac{4\pi}{ 3}\) con los ejes de simetría de prolato a lo largo de los ejes 1 y 2 respectivamente. Para\(\gamma = \frac{\pi}{ 3 }\) entonces\(\delta R_1 = \delta R_3 = +\frac{1}{2} \sqrt{\frac{5}{4\pi}} R_0\beta\) mientras\(\delta R2 = − \sqrt{\frac{5}{4\pi}} R_0\beta\), es decir el cuerpo tiene deformación oblata con el eje de simetría a lo largo del eje 2. Se obtiene la misma forma oblata para\(\gamma = \pi\) y\(\gamma = \frac{5\pi }{3}\) con los ejes de simetría oblata a lo largo de los ejes 3 y 1 respectivamente. Para otros valores de\(\gamma\) la forma es elipsoidal.
Para el cuerpo rígido deformado asimétrico, el hamiltoniano rotacional se puede expresar en la forma [Dav58]
\[H = \sum^3_{k=1 } \frac{|R|^2}{ 4B\beta^2 \sin^2(\gamma^{\prime} − \frac{2\pi k}{3}) }\notag\]
donde está el momento angular rotacional\(\mathbf{R}\). Los principales momentos de inercia están relacionados por el parámetro de triaxialidad\(\gamma^{\prime}\) que asumen que es idéntico al parámetro shape\(\gamma\). Para la simetría axial, el momento de inercia alrededor del eje de simetría se toma como cero para un sistema cuántico ya que la rotación del pozo potencial alrededor del eje de simetría corresponde a ningún cambio en el pozo potencial, o la rotación correspondiente de los nucleones unidos. Es decir, el núcleo no es un cuerpo rígido, los nucleones solo giran en la medida en que el pozo de potencial elipsoidal se manivela alrededor de tal manera que los nucleones deben seguir la rotación del pozo potencial. Además, los modos vibracionales coexisten alrededor de la deformación asimétrica promedio, más la deformación del octupolo a menudo coexiste con los modos deformados cuadrupolo anteriores.