
13.23: Rotor rígido simétrico sujeto a par alrededor de un punto fijo
- Page ID
- 126477
El movimiento de una parte superior simétrica que gira en un campo gravitacional, con un punto en una ubicación fija, se encuentra frecuentemente en movimiento rotacional. Ejemplos son el giroscopio y la peonza de un niño. La rotación de un rotor rígido sujeto a par alrededor de un punto fijo, es un caso donde es necesario tomar el tensor de inercia con respecto al punto fijo en el cuerpo, y no en el centro de masa.
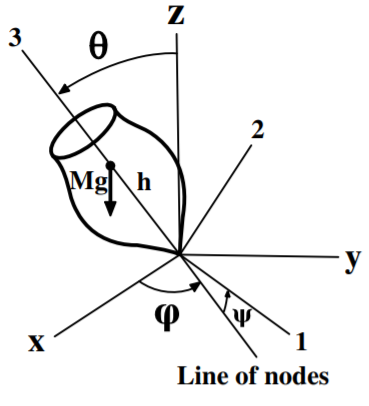
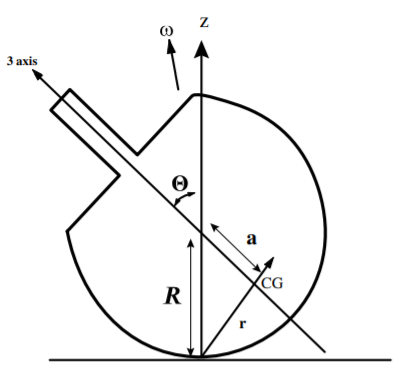
Consideremos la geometría, mostrada en la Figura\(\PageIndex{1}\), donde la parte superior simétrica de masa\(M\) gira alrededor de una punta fija que se desplaza una\(h\) distancia del centro de masa. Se supone que la punta de la parte superior está en el origen tanto del marco fijo en el espacio como del marco\((x, y, z)\) fijo al cuerpo\((1, 2, 3)\). Supongamos que la velocidad de traslación es cero y deja que los momentos principales sobre el punto fijo de la parte superior simétrica sean\(I_1 = I_2 \neq I_3\).
Las ecuaciones de movimiento de Lagrange se pueden derivar asumiendo que la energía cinética es igual a la energía cinética rotacional, es decir, se supone que la energía cinética traslacional\(T_{trans} = 0\). Entonces, la energía cinética de un rotor rígido inertialmente simétrico se puede derivar para que la parte superior simétrica sin par de torsión como se indica en la ecuación\((13.20.37)\) para ser
\[\begin{align} T = \frac{1}{2} \sum_i I_i\omega^2_i = \frac{1}{2}I_1 (\omega^2_1 + \omega^2_2 )+ \frac{1}{ 2} I_3\omega^2_3 \\ = \frac{1}{2} I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \right) + \frac{1}{2} I_3 \left( \dot{\phi} \cos \theta + \dot{\psi}\right)^2 \end{align}\]
Dado que la energía potencial es\(U = Mgh \cos \theta\) entonces la lagrangiana iguala
\[L = \frac{1}{2} I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2\right) + \frac{1}{2} I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 − Mgh \cos \theta \]
El momento angular alrededor del\(z\) eje fijo en el espacio\(p_{\phi}\) está conjugado con\(\phi\). De las ecuaciones de Lagrange
\[\dot{p}_{\phi} = \frac{\partial L}{\partial \phi} = 0 \]
es decir,\(p_{\phi}\) es una constante de movimiento dada por el impulso generalizado
\[p_{\phi} = \frac{\partial L}{\partial \dot{\phi}} = ( I_1 \sin^2 \theta + I_3 \cos^2 \theta ) \dot{\phi} + I_3\dot{\psi} \cos \theta = S_z = \text{ constant}\]
donde\(S_z\) está la proyección de momento angular a lo largo del\(z\) eje fijo en el espacio.
De manera similar, el momento angular alrededor del eje 3 fijo al cuerpo está conjugado con\(\psi\). De las ecuaciones de Lagrange,
\[\dot{p}_{\psi} = \frac{\partial L}{ \partial \psi} = 0 \]
es decir,\(p_{\psi}\) es una constante de movimiento dada por el impulso generalizado
\[p_{\psi} = \frac{\partial L}{ \partial \dot{\psi}} = I_3 \left( \dot{\dot{\phi}} \cos \theta + \dot{\psi} \right) = B_3 = \text{ constant}\]
donde\(B_3\) está la proyección de momento angular a lo largo del eje 3 fijo al cuerpo. Las dos relaciones anteriores se pueden resolver para dar la velocidad angular de precesión\(\dot{\phi}\) alrededor del\(z\) eje fijo al espacio
\[\dot{\phi} = \frac{p_{\phi} − p_{\psi} \cos \theta}{ I_1 \sin^2 \theta }= \frac{S_z − B_3 \cos \theta}{ I_1 \sin^2 \theta} \]
y la velocidad angular de giro\(\dot{\psi}\) alrededor del\(x_3\) eje fijo del cuerpo
\[\dot{\psi} = \frac{p_{\psi}}{I_3} − \frac{(p_{\phi} − p_{\psi} \cos \theta ) \cos \theta}{I_1 \sin^2 \theta} = \frac{B_3}{I_3} − \frac{(S_z − B_3 \cos \theta ) \cos \theta}{ I_1 \sin^2 \theta }\]
Dado que\(p_{\phi}\) y\(p_{\psi}\) son constantes de movimiento, es decir\(S_3, B_3\), entonces estas velocidades angulares de rotación dependen únicamente de\(I_1\),\(I_3\). y\(\theta\).
Hay otra constante de movimiento disponible si no actúan fuerzas de fricción sobre el sistema, es decir, la conservación de energía. Esto implica que la energía total
\[E = \frac{1}{ 2} I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \right) + \frac{1}{2} I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 + Mgh \cos \theta \]
será una constante de movimiento. Pero el término medio en el lado derecho también es una constante de movimiento
\[\frac{1}{2} I_3 \left( \dot{\phi} \cos \theta + \dot{\psi} \right)^2 = \frac{p^2_{\psi}}{I_3} = \frac{B^2_3}{I_3} = \text{ constant}\]
Así, la conservación de energía puede ser reescrita definiendo una energía\(E^{\prime}\) donde
\[E^{\prime} \equiv E − \frac{p^2_{\psi}}{ I_3} = \frac{1}{2} I_1 \left( \dot{\phi}^2 \sin^2 \theta + \dot{\theta}^2 \right) +Mgh \cos \theta = \text{ constant}\]
Esto se puede escribir como
\[E^{\prime} = \frac{1}{2} I_1 \dot{\theta}^2 + \frac{(p_{\phi} − p_{\psi} \cos \theta )^2}{ 2I_1 \sin^2 \theta} + Mgh \cos \theta \label{13.186}\]
que se puede expresar como
\[E^{\prime} = \frac{1}{2} I_1 \dot{\theta}^2 + V (\theta ) \]
donde\(V (\theta )\) es un potencial efectivo
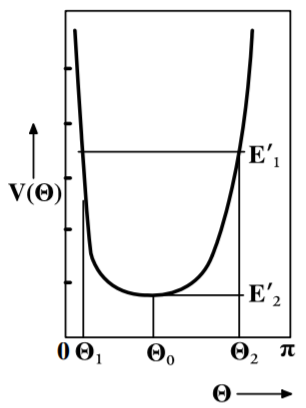
\[V (\theta ) \equiv \frac{(p_{\phi} − p_{\psi} \cos \theta )^2}{2I_1 \sin^2 \theta} + Mgh \cos \theta = \frac{(S_z − B_3 \cos \theta )^2}{ 2I_1 \sin^2 \theta} + Mgh \cos \theta \label{13.188}\]
El potencial efectivo\(V (\theta )\) se muestra en la Figura\(\PageIndex{2}\). Es claro que el movimiento de una parte superior simétrica con energía efectiva\(E^{\prime}\) se limita a los ángulos\(\theta_1 < \theta < \theta_2\). Obsérvese que el resultado anterior también se obtiene si se utiliza el ruthian, en lugar del lagrangiano, como se menciona en el capítulo\(8.7\), y se define por ecuación\((8.6.8)\). Es decir, el rutiano puede escribirse como
\[R(\theta , \dot{\theta} , p_{\phi} p_{\psi} )_{cyclic} = \dot{\phi} p_{ \phi} + \dot{\psi} p_{ \psi} − L = H (\phi , p_{\phi} , \psi , p_{\psi }) − L(\theta , \dot{\theta} )_{noncyclic} \\ = −\frac{1}{2} I_1 \dot{\theta}^2 + \frac{(p_{\phi }− p_{\psi} \cos \theta )^2}{ 2I_1 \sin^2 \theta} + \frac{p^2_{\psi}}{ 2I_3 } + Mgh \cos \theta \]
El ruthian\(R(\theta , \dot{\theta} , p_{\phi} p_{\psi} )_{cyclic}\) actúa como un hamiltoniano para las\((\psi , p_{\psi} )\) variables\((\phi , p_{\phi} )\) y que son constantes de movimiento, y por lo tanto son variables ignorables. El Routhian actúa como el Lagrangiano negativo para la variable restante\(\theta \), con energía cinética rotacional\(\frac{1} {2} I_1 \dot{\theta}^2\) y energía potencial efectiva\(V_{eff}\)
\[V_{eff} = \frac{(p_{\phi} − p_{\psi} \cos \theta )^2}{2I_1 \sin^2 \theta } + \frac{p^2_{\psi}}{ I_3} + Mgh \cos \theta = V (\theta ) + \frac{p^2_{\psi}}{ I_3 }\notag\]
La ecuación de movimiento que describe el sistema en el marco giratorio viene dada por una ecuación de Lagrange
\[\frac{d}{dt}(\frac{ \partial R_{cyclic} }{\partial \dot{\theta}} ) − \frac{\partial R_{cyclic}}{ \partial \theta} = 0 \notag\]
El signo negativo del Routhian se cancela cuando se usa en la ecuación de Lagrange. Así, en el marco giratorio de referencia, el sistema se reduce a un solo grado de libertad, el ángulo de nutación\(\theta\), con energía efectiva\(E^{\prime}\) dada por las ecuaciones\ ref {13.186} -\ ref {13.188}.
El movimiento de la parte superior simétrica es más simple al valor mínimo de la curva de potencial efectiva, donde\(E^{\prime} = V_{\text{min}}\), en la que la nutación\(\theta\) se restringe a un solo valor\(\theta = \theta_0\). El movimiento es una precesión constante en un ángulo fijo de inclinación, es decir, el “dormiente”. Resolviendo para\((\frac{dV}{d\theta} )_{\theta =\theta_0} = 0\) da eso
\[p_{\phi} − p_{\psi} \cos \theta = \frac{p_{\psi} \sin^2 \theta_0 }{2 \cos \theta_0} \left[ 1 \pm \sqrt{ 1 − \frac{4MghI_1 \cos \theta_0 }{p^2_{\psi}}} \right]\]
Si\(\theta_0 < \frac{\pi}{2}\), entonces para asegurar que la solución es real se requiere un valor mínimo del momento angular en el eje fijo del cuerpo de\(p^2_{\psi} \geq 4MghI_1 \cos \theta_0\). Si\(\theta_0 > \frac{\pi}{2}\) entonces no hay proyección mínima de momento angular en el eje fijo al cuerpo. Existen dos posibles soluciones a la relación cuadrática correspondientes a una frecuencia precessional lenta o rápida. Por lo general, se observa la lenta precesión.
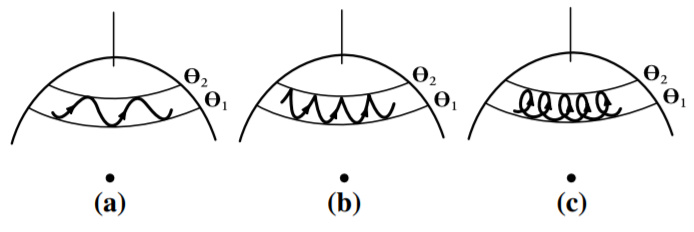
Para el caso general, donde\(E^{\prime}_1 > V_{\text{min}}\), el ángulo de nutación\(\theta\) entre los 3 ejes fijos al espacio y los fijos al cuerpo varía en el rango\(\theta_1 < \theta < \theta_2\). Este eje exhibe una variación de asentimiento que se llama nutación. La figura\(\PageIndex{3}\) muestra la proyección del eje de simetría fijo al cuerpo sobre la esfera unitaria en el marco fijo al espacio. Tenga en cuenta que el comportamiento de nutación observado depende de los tamaños relativos de\(p_{\phi}\) y\(p_{\psi} \cos \theta\). Para ciertos valores, la precesión\(\dot{\phi}\) cambia de signo entre los dos valores limitantes de\(\theta\) producir un movimiento de lazo como se muestra en la Figura\(\PageIndex{3c}\). Otra condición es donde la precesión es cero para\(\theta_2\) producir una cúspide\(\theta_2\) como se ilustra en la Figura\(\PageIndex{3b}\). Este comportamiento se puede demostrar usando el giroscopio o la parte superior simétrica.
Ejemplo\(\PageIndex{1}\): The Spinning "Jack"
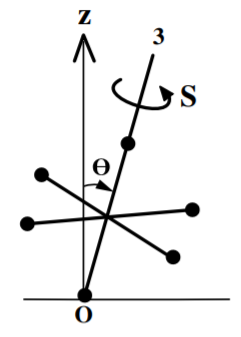
El juego “Jacks” se juega utilizando Jacks metálicos, cada uno de los cuales comprende seis masas iguales\(m\) en los extremos opuestos de ejes ortogonales de longitud\(l\). Considera que un gato gira alrededor del eje 3 fijo al cuerpo con la masa más baja en un punto fijo en el suelo, y con una precesión constante alrededor del eje vertical fijo en el espacio\(z\) con ángulo\(\theta\) como se muestra. Supongamos que los ejes fijos al cuerpo se alinean con los brazos del gato.
Los principales momentos de inercia alrededor de una masa viene dado por el teorema del eje paralelo a ser\(I_2 = I_1 = 4ml^2+6ml^2 = 10ml^2\) y\(I_3 = 4ml^2\).
En el bastidor fijo giratorio el par debido a la gravedad tiene componentes
\[\mathbf{N} = \begin{pmatrix} 6mgl \sin \theta \sin\psi \\ 6mgl \sin \theta \cos \psi \\ 0 \end{pmatrix}\notag \]
y los componentes de la velocidad angular son
\[\boldsymbol{\omega} = \begin{pmatrix} \dot{\phi} \sin \theta \sin\psi + \dot{\theta} \cos \psi \\ \dot{\phi} \sin \theta \cos \psi − \dot{\theta} \sin \\ \dot{\phi} \cos \theta + \dot{\psi} \end{pmatrix} \notag\]
Usando las ecuaciones de Euler\((13.17.6)\) para los componentes anteriores de\(N\) y\(\omega\) en el marco fijo al cuerpo, da
\[10\dot{\omega}_1 − 6\omega_2\omega_3 = \frac{6g}{l} \sin \theta \sin \psi \label{a}\tag{a} \]
\[10\dot{\omega}_2 − 6\omega_1\omega_3 = \frac{6g}{l} \sin \theta \cos \psi \label{b}\tag{b}\]
\[ 4\dot{\omega}_3 = 0 \label{c}\tag{c}\]
Ecuación\ ref {c} relaciona el giro alrededor del eje 3, la precesión, y el ángulo con la vertical\(\theta\), es decir
\[\omega_3 = \dot{\phi} \cos \theta + \dot{\psi} = \Omega \cos \theta + s = \text{ constant}\]
donde\(\dot{\psi} \equiv s\) está el giro y\(\dot{\phi} \equiv \Omega\) es la velocidad angular de precesión.
Si el eje de giro es casi vertical,\(\theta \approx 0\) y así\(\sin \theta \approx \theta\) y\(\cos \theta \approx 1\). Multiplicar Ecuación\ ref {a}\(\times \sin\psi +\)\ ref {b}\(\times \cos \psi\) y usando las ecuaciones de los componentes de\(\omega\) da
\[5\ddot{\theta} + \left( 2\Omega s − 3\Omega^2 − \frac{3g}{l} \right) \theta = 0 \notag\]
El soporte debe ser positivo para tener oscilaciones sinusoidales estables. Es decir, la velocidad angular de giro\(s\) requerida para que el gato gire alrededor de un eje vertical estable viene dada por.
\[s > \frac{3\Omega}{2} + \frac{3g}{2l \Omega}\notag\]
Este ejemplo ilustra las condiciones requeridas para una rotación estable de cualquier parte superior axialmente simétrica.
Ejemplo\(\PageIndex{2}\): The Tippe Top
El Top Tippe comprende una sección de una esfera, a la que se monta una varilla cilíndrica corta en la sección plana, como se ilustra. Cuando el Tippe Top se hace girar sobre una superficie horizontal, esta parte superior exhibe el comportamiento perverso de pasar de la rotación con la cabeza esférica apoyada sobre la superficie horizontal, a voltearse de tal manera que gira descansando sobre su varilla cilíndrica alargada. La orientación del momento angular permanece aproximadamente vertical como se esperaba de la conservación del momento angular. Esto implica que la rotación con respecto a los ejes fijos del cuerpo debe invertirse a medida que la parte superior se invierte. El centro de masa se eleva cuando la parte superior se invierte; la energía potencial adicional es proporcionada por una reducción en la energía cinética rotacional.
El comportamiento de Tippe Top se descubrió por primera vez en la década de 1890 pero las soluciones adecuadas de las ecuaciones de movimiento solo se han desarrollado desde la década de 1950. Desde los precesos superiores alrededor del eje vertical, el punto de contacto no está en el eje de simetría de la parte superior. La fricción deslizante entre la superficie de la peonza y la superficie horizontal proporciona un par que hace que la precesión de la parte superior aumente y eventualmente se vuelque sobre la clavija cilíndrica. El Tippe Top es típico de muchos fenómenos en la física donde se puede reconocer el principio de la física subyacente pero una solución detallada y rigurosa puede ser complicada.
El sistema cuenta con cinco grados de libertad, los\(x,y\) cuales especifican la ubicación en el plano horizontal, más los tres ángulos de Euler\((\varphi, \theta , \phi )\). El artículo de Cohen [Coh77] explica el movimiento en términos de ángulos de Euler utilizando la relación de transformación de laboratorio a cuerpo fijo. Muestra que la fricción juega un papel fundamental en el movimiento contrario a algunas afirmaciones anteriores. Ciocci y Langerock [Cio07] utilizaron el Routhian\(R_{cyclic}\) para reducir el número de grados de libertad de 5 a 2, es decir,\(\theta\) cuál es el ángulo de inclinación, y\(\varphi^{\prime}\) cuál es la orientación de la inclinación. Este ruthiano\(R_{cyclic}\) es un lagrangiano en dos dimensiones que se utilizó para derivar las ecuaciones de movimiento a través de la ecuación de Lagrange Euler
\[\begin{aligned} \frac{d}{dt}( \frac{ \partial R_{cyclic} }{\partial \dot{\theta} }) − \frac{\partial R_{cyclic} }{\partial \theta} = Q_{\theta} \\ \frac{d}{dt}( \frac{\partial R_{cyclic}}{ \partial \dot{\varphi}^{\prime}}) − \frac{\partial R_{cyclic}}{ \partial \varphi^{\prime}} = Q_{\varphi^{\prime}}\end{aligned}\]
donde\(Q_{\theta} \ Q_{\varphi^{\prime}}\) se generalizan pares alrededor de los 2 ángulos que toman en cuenta las fuerzas de fricción deslizantes. Este sofisticado enfoque de reducción Routhian proporciona una solución exhaustiva y refinada para el Tippe Top y confirma que la fricción deslizante juega un papel clave en el comportamiento inusual de la Tippe Top.