
13.24: La Rueda Rodante
- Page ID
- 126372
Como se discute en el capítulo\(5.7\), la rueda rodante es un sistema no holonómico que es simple en principio, pero en la práctica la solución puede ser complicada, como lo ilustra el Tippe Top. Capítulo\(13.23\) discutió el movimiento de una parte superior simétrica que gira alrededor de un punto fijo en el eje de simetría cuando se somete a un par. La rueda rodante implica la rotación de un cuerpo rígido simétrico que está sujeto a pares. Sin embargo, el punto de contacto de la rueda con un plano estático está en la periferia de la rueda, y se supone que la fricción en el punto de contacto asegura un deslizamiento cero. Tenga en cuenta que la fricción es necesaria para asegurar que el objeto giratorio ruede sin deslizarse, pero la fuerza de fricción no funciona para el balanceo puro de una rueda rígida indeformable.
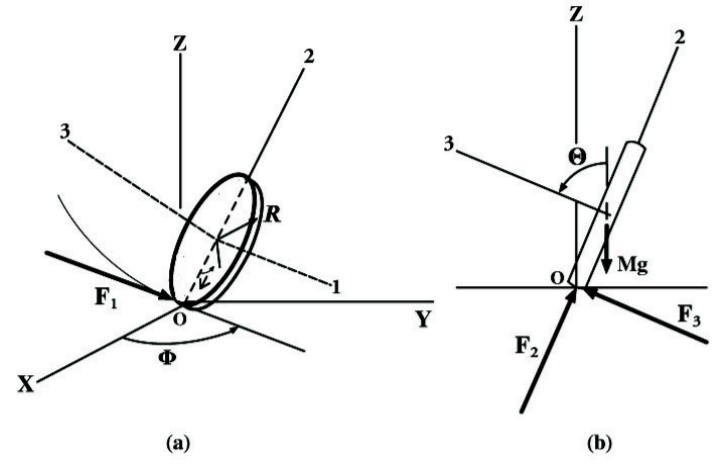
El sistema de coordenadas empleado se muestra en la Figura\(\PageIndex{1}\). Por simplicidad es mejor usar un marco de coordenadas móviles\((\mathbf{1},\mathbf{2},\mathbf{3})\) que se fije a la orientación de la rueda con el origen en el centro de masa de la rueda, pero este marco de referencia móvil no incluye la velocidad angular\(\dot{\psi}\) del disco alrededor del\(\mathbf{3}\) eje. Es decir, el\((\mathbf{1},\mathbf{2},\mathbf{3})\) marco móvil tiene velocidades angulares
\[\begin{align} \omega_1 = \dot{\theta} \label{13.191} \\ \omega_2 = \dot{\phi} \sin \theta \notag\\ \omega_3 = \dot{\phi} \cos \theta \notag\end{align}\]
El bastidor fijado en la rueda giratoria debe incluir la velocidad angular adicional del disco\(\dot{\psi}\) alrededor del\(\mathbf{\hat{e}}_3\) eje, es decir
\[\begin{align}\Omega_1 = \omega_1 = \dot{\theta} \label{13.192} \\ \Omega_2 = \omega_2 = \dot{\phi} \sin \theta \notag\\ \Omega_3 = \omega_3 + \dot{\psi} = \dot{\phi} \cos \theta + \dot{\psi} \notag\end{align}\]
donde\(\Omega \) designa la velocidad angular del disco giratorio, mientras que\(\boldsymbol{\omega}\) designa la rotación del marco móvil\((\mathbf{1},\mathbf{2},\mathbf{3})\).
Los principales momentos de inercia de un disco circular delgado están relacionados por el teorema del eje perpendicular (capítulo\(13.9\))
\[I_1 + I_2 = I_3 \notag \]
Ya que\(I_1 = I_2\) para un disco uniforme, por lo tanto\(I_3 = 2I_1\).
La ecuación se\((12.3.10)\) puede utilizar para relacionar las fuerzas vectoriales\(\mathbf{F}\) en el marco fijo en el espacio con la velocidad de cambio de momento en el marco móvil\((\mathbf{1},\mathbf{2},\mathbf{3})\).
\[\mathbf{F} = \mathbf{\dot{p}}_{space} = \mathbf{\dot{p}}_{moving} + \boldsymbol{\omega} \times \mathbf{p} \label{13.193}\]
Esto lleva a las siguientes relaciones para los tres componentes en el marco móvil
\[\begin{align}F_1 = \dot{p}_1 + \omega_2 p_3 − \omega_3 p_2 \label{13.194} \\ F_2 − Mg \sin \theta = \dot{p}_2 + \omega_3 p_1 − \omega_1 p_3 \notag\\ F_3 − Mg \cos \theta = \dot{p}_3 + \omega_1 p_2 − \omega_2 p_1 \notag\end{align}\]
donde\(F_1, F_2, F_3\) se muestran las fuerzas reactivas que actúan en la Figura\(\PageIndex{1}\).
Del mismo modo, los pares\(\mathbf{N}\) en el marco fijo en el espacio pueden estar relacionados con la velocidad de cambio del momento angular por
\[\mathbf{N} = \mathbf{\dot{L}}_{space} = \mathbf{\dot{L}}_{moving} + \boldsymbol{\omega} \times \mathbf{L} \label{13.195}\]
donde\(L_i = \mathbf{I}_i\Omega _i\). Esto lleva a las siguientes relaciones para las tres ecuaciones de par en el marco móvil
\[\begin{align}N_1 = −F_3 R = I_1 \dot{\Omega}_1 + I_3\Omega_3\omega_2 − I_2\Omega 2\omega_3 \label{13.196} \\ N_2 = 0 = I_1 \dot{\Omega}_2 + I_1 \Omega_1 \omega_3 − I_3\Omega_3\omega_1 \notag\\ N_3 = F_1 R = I_3 \dot{\Omega}_3 + I_2 \Omega_2 \omega_1 − I_1\Omega_1 \omega_2 \notag\end{align}\]
Las restricciones de rodadura son
\[p_1 + MR \Omega_3 = 0 \label{13.197} \\ p_2 = 0 \\ p_3 − MR \Omega_1 = 0 \]
donde\(p_i = Mv_i\). Combinando ecuaciones\ ref {13.194},\ ref {13.196},\ ref {13.197} da
\[\begin{align}(I_1 + MR^2) \dot{\Omega}_1 + ( I_3 + MR^2) \omega_2\Omega_3 − I_2\omega_3\Omega_2 = −MgR \cos \theta \label{13.198} \\ I_1\dot{\Omega}_2 + I_1\omega_3\Omega_1 − I_3\omega_1\Omega_3 = 0 \notag\\ ( I_3 + MR^2) \dot{\Omega}_3 + I_2\omega_1\Omega_2 − ( I_1 + MR^2) \omega_2\Omega_1 = 0 \notag\end{align}\]
Estas son las ecuaciones de par sobre el punto de contacto\(O\).
Introducción de ecuaciones\ ref {13.191} y\ ref {13.192} en la Ecuación\ ref {13.198} expresa las ecuaciones de movimiento en términos de los ángulos de Euler a ser
\[\begin{align}( I_1 + MR^2) \ddot{\theta} + ( I_3 + MR^2) \dot{\phi} \sin \theta \left( \dot{\phi} \cos \theta + \dot{\psi}\right)− I_1\dot{\phi}^2 \sin \theta \cos \theta = −MgR \cos \theta \label{13.199} \\ \notag I_1 \ddot{\phi} \sin \theta + 2I_1\dot{\phi} \dot{\theta} \cos \theta − I_3 \dot{\theta} \left( \dot{\phi} \cos \theta + \dot{\psi}\right)= 0 \\ \notag ( I_3 + MR^2) \left( \ddot{\phi} \cos \theta − \dot{\phi} \dot{\theta} \sin \theta + \ddot{\psi} \right)− MR^2 \dot{\theta}\dot{\phi} \sin \theta = 0 \end{align}\]
Las ecuaciones\ ref {13.199} son no lineales, y una solución de forma cerrada es posible solo para casos limitados como cuando\(\theta = 90^{\circ}\).
Tenga en cuenta que las ecuaciones de movimiento anteriores también se pueden derivar usando la mecánica lagrangiana sabiendo que
\[L = \frac{1}{2} M ( v^2_1 + v^2_2 + v^2_3 ) + \frac{1}{2} I_1 ( \Omega^2_1 + \Omega^2_2 ) + \frac{1}{2} I_3\Omega^2_3 − MgR \cos \theta \notag\]
Las ecuaciones diferenciales de restricción se pueden derivar de las ecuaciones\ ref {13.197} para ser
\[dx − R \cos \phi d\psi = 0 \notag\]
\[dy − R \sin \phi d\psi = 0 \]
El uso de fuerzas generalizadas más las ecuaciones de Lagrange-Euler se\((6.3.28)\) puede utilizar para derivar las ecuaciones de movimiento y resolver para los componentes de la fuerza de restricción\(F_1\),\(F_2\), y\(F_3\).
Ejemplo\(\PageIndex{1}\): Tipping stability of a rolling wheel
Una rueda circular que rueda en un plano vertical a alta velocidad angular inicialmente rueda en línea recta y permanece vertical. Sin embargo, por debajo de una cierta velocidad angular, las fuerzas giroscópicas se vuelven más débiles y la rueda se inclinará lateralmente y virará rápidamente desde la dirección inicial. Es interesante estimar la velocidad angular mínima del disco de tal manera que no empiece a volcarse lateralmente.
Tenga en cuenta que las ecuaciones\ ref {13.199} son satisfechas para\(\theta = \frac{\pi}{2}\),\(\phi = 0\) y\(\dot{\psi} = \Omega_3 = \) constantes. Supongamos que una pequeña perturbación hace que el ángulo de inclinación sea\(\theta = \frac{\pi}{2} + \alpha\) donde\(\alpha\)\(\phi\) es pequeño y que no es cero pero pequeño, es decir\(\dot{\theta} = \dot{\alpha}\) y\(\dot{\phi}\) son pequeños. Mantener solo términos a primer orden en la tercera de ecuaciones\ ref {13.199}, e integrando da
\[\dot{\phi} \cos \theta + \dot{\psi} = \Omega_3 \tag{a}\label{a}\]
Las dos primeras ecuaciones\ ref {13.198} se convierten
\[( I_1 + MR^2) \ddot{\alpha} + ( I_3 + MR^2) \dot{\phi} \Omega_3 − MgR\alpha = 0 \tag{b}\label{b}\]
\[I_1 \ddot{\phi} − I_3\Omega_3 \dot{\alpha} = 0 \tag{c}\label{c}\]
La integración de la ecuación\ ref {c} da
\[\dot{\phi} = \frac{I_3\Omega_3}{ I_1 } \alpha \tag{d}\label{d}\]
Insertar\ ref {d} en\ ref {b} da
\[( I_1 + MR^2) \ddot{\alpha} + \left[ ( I_3 + MR^2) \frac{I_3\Omega^2_3}{ I_1 } − MgR \right] \alpha = 0 \tag{e}\label{e}\]
Ecuación\ ref {e} tiene una solución oscilatoria estable cuando el corchete en positivo, es decir,
\[\Omega^2_3 > \frac{I_1MgR}{ I_3 (I_3 + MR^2)} \tag{f}\label{f}\]
lo que da la velocidad angular mínima requerida para un movimiento de balanceo estable. Para una velocidad angular menor a la mínima, el corchete en la Ecuación\ ref {e} es negativo, lo que lleva a una solución exponencialmente en descomposición y divergente. Para un disco uniforme el teorema del eje perpendicular da\(I_3 = 2I_1 = \frac{1}{2} MR^2\) para el cual la ecuación\ ref {f} da
\[\Omega^2_3 \frac{g}{3R} \tag{g}\label{g}\]
Por lo tanto, la velocidad lineal crítica de la rueda es
\[v = R\Omega_3 > \sqrt{\frac{gR}{3}} \tag{h}\label{h}\]
La rueda de bicicleta proporciona un ejemplo común del vuelco de una rueda rodante. Para el\(0.35\)\(m\) radio típico de una rueda de bicicleta, esto da una velocidad crítica de\(v > 1.07\)\(m/s\)\(= 2.4\)\(mph\). 4
4 La estabilidad de la bicicleta es sensible a la rueda giratoria y otros aspectos de la geometría de dirección de la rueda delantera, además de los efectos giroscópicos. Excelentes artículos sobre este sub ject han sido escritos por D.E.H. Jones Physics Today 23 (4) (1970) 34, y también por J. Lowell & H.D. McKell, American Journal of Physics 50 (1982) 1106.