
13.E: Rotación de Cuerpo Rígido (Ejercicios)
- Page ID
- 126358
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
1. Un caparazón esférico hueco tiene una masa\(m\) y un radio\(R\).
- Calcular el tensor de inercia para un conjunto de coordenadas cuyo origen está en el centro de masa del caparazón.
- Ahora supongamos que el caparazón está rodando sin deslizarse hacia un escalón de altura\(h\), donde\(h < R\). El proyectil tiene una velocidad lineal\(v\). ¿Cuál es el momento angular del proyectil en relación con la punta del escalón?
- El caparazón ahora golpea la punta del escalón de manera inelástica (de manera que el punto de contacto se adhiere al escalón, pero el caparazón aún puede girar alrededor de la punta del escalón). ¿Cuál es el momento angular del proyectil inmediatamente después del contacto?
- Finalmente, encuentre la velocidad mínima que permita que el proyectil supere el escalón. Exprese su resultado en términos de\(m\)\(g\),,\(R\), y\(h\).
2. Los vectores\(\hat{x}\),\(\hat{y}\), y\(\hat{z}\) constituyen un conjunto de ejes ortogonales diestros. Los vectores\(\hat{x} + \hat{y} − 2\hat{z}\),\(−\hat{x} + \hat{y}\), y también\(\hat{x} + \hat{y} + \hat{z}\) son perpendiculares entre sí.
- Escribe el conjunto de cosenos de dirección relacionando los nuevos ejes con los viejos.
- ¿Cómo se definen los ángulos eulerianos? Describir esta transformación por un conjunto de ángulos eulerianos.
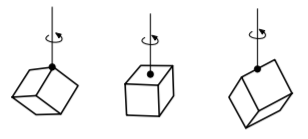
3. Un péndulo torsional consiste en un cable vertical unido a una masa que puede girar alrededor del eje vertical. Considera tres péndula torsional que consisten en alambres idénticos de los cuales se cuelgan cubos sólidos homogéneos idénticos. Un cubo se cuelga de una esquina, uno a mitad de camino a lo largo de un borde, y uno de la mitad de una cara como se muestra. ¿Cuáles son las proporciones de los periodos de las tres péndula?
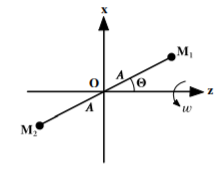
4. Una mancuerna comprende dos masas de punto iguales\(M\) conectadas por una varilla rígida sin masa de longitud\(2A\) que está obligada a girar alrededor de un eje fijado al centro de la varilla en un ángulo\(\theta\) como se muestra en la figura. El centro de la varilla está en el origen de las coordenadas, el eje a lo largo del\(z\) -eje, y la mancuerna se encuentra en el\(x-y\) plano en\(t = 0\). La velocidad angular\(\omega\) es una constante en el tiempo y se dirige a lo largo del\(z\) eje.
- Calcular todos los elementos del tensor de inercia. Asegúrese de especificar el sistema de coordenadas utilizado.
- Utilizando el tensor de inercia calculado, encuentra el momento angular de la mancuerna en el marco de laboratorio en función del tiempo.
- Usando la ecuación\(L = r \times p\), calcula el momento angular y muestra que es igual a la respuesta de la parte (b).
- Calcular el par en el eje en función del tiempo.
- Calcular la energía cinética de la mancuerna.
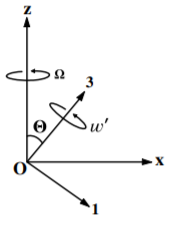
5. Una parte superior simétrica pesada tiene una masa\(m\) con el centro de masa a una\(h\) distancia del punto fijo sobre el que gira y\(I_1 = I_2 \neq I_3\). La parte superior está precediendo a una velocidad angular constante\(\Omega\) alrededor del\(z\) eje vertical fijo al espacio. Cuál es el giro mínimo\(\omega^{\prime}\) alrededor del eje de simetría fijo al cuerpo, es decir, el eje 3 asumiendo que el eje 3 está inclinado en ángulo\(\theta = \theta\) con respecto al\(z\) eje vertical. Resolver el problema en el instante en que todos los\(z, x, 3, 1\) ejes están en el mismo plano como se muestra en la figura.
6. Considerar que un objeto con el centro de masa está en el origen y el tensor de inercia,\[I = I \begin{pmatrix} 1/2 & -1/2 & 0 \\ -1/2 & 1/2 & 0 \\ 0 & 0 & 1 \end{pmatrix}\nonumber\]
- Determinar los momentos principales de inercia y los ejes principales. Adivina el objeto.
- Determinar la matriz de rotación\(R\) y calcular\(R^{\dagger}IR\). ¿Los elementos diagonales coinciden con tus resultados de (a)? Nota: columnas de\(R\) son vectores propios de\(I\).
- Asumir\(\omega = \frac{\omega}{\sqrt{2}} (\hat{x} + \hat{z})\). Determinar\(L\) en el sistema de coordenadas giratorias. ¿Están\(L\) y\(\omega\) en la misma dirección? ¿Qué significa esto?
- Repita (c) para\(\omega = \frac{\omega}{\sqrt{ 2}} (\hat{x} − \hat{y})\). ¿Qué es diferente y por qué?
- ¿Para qué caso se requerirá un par distinto de cero?
- Determinar la energía cinética rotacional para el caso\(\omega = \frac{\omega}{\sqrt{ 2}} (\hat{x} − \hat{y})\)?
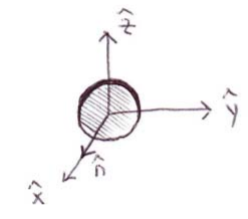
7. Considera una rueda (disco sólido) de masa\(m\) y radio\(r\). La rueda está sujeta a velocidades angulares\(\omega_A = \omega_A \hat{n}\) donde\(\hat{n}\) es normal a la superficie y\(\omega_B = \omega_B \hat{z}\).
- Elija un conjunto de ejes principales por observación.
- Determinar las velocidades angulares y el momento angular a lo largo de los ejes principales. Nota:\(I_1 = \frac{1}{2} mr^2\) y\(I_2 = I_3 = \frac{1}{4}mr^2\).
- Determinar el par.
- Determine la matriz de rotación que gira el sistema de coordenadas fijas al sistema de coordenadas del cuerpo.
8. Determinar los principales momentos de inercia de un elipsoide dados por la ecuación,\[\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1.\nonumber\]
9. Determinar los principales momentos de inercia de una esfera de radio\(R\) con una cavidad de radio\(r\) ubicada\(\epsilon\) desde el centro de la esfera.
10. Tres masas iguales\(m\) forman los vértices de un triángulo equilátero de longitud lateral\(L\). Supongamos que las masas están localizadas en\(\left( 0, 0, \frac{L}{\sqrt{3}}\right)\)\(\left( 0, \frac{L}{2}, − \frac{L}{ 2 \sqrt{3}}\right)\),\(\left( 0, -\frac{L}{2}, − \frac{L}{ 2 \sqrt{3}}\right)\), y, tal que el centro de masa se ubica en el origen.
- Determinar los momentos principales de inercia y ejes principales.
Ahora considere el mismo sistema girado\(45^{\circ}\) alrededor del\(\hat{z}\) eje -eje. Supongamos que las masas están localizadas en\(\left( 0, 0, \frac{L}{\sqrt{3}}\right)\)\(\left( -\frac{L}{2\sqrt{2}}, \frac{L}{2\sqrt{2}}, − \frac{L}{ 2 \sqrt{3}}\right)\),, y\(\left( \frac{L}{2\sqrt{2}}, -\frac{L}{2\sqrt{2}}, − \frac{L}{ 2 \sqrt{3}}\right)\), respectivamente.
- Determinar los momentos principales de inercia y ejes principales.
- ¿Podría haber respondido (b) sin determinar explícitamente el tensor de inercia? ¿Cómo?
11. Calcular los momentos de inercia\(I_1, I_2, I_3\) para un cono homogéneo de masa\(M\) cuya altura es\(h\) y cuya base tiene un radio\(R\). Elija el\(x_3\) eje -a lo largo del eje de simetría del cono.
- Elija el origen en el vértice del cono, y calcule los elementos del tensor de inercia.
- Hacer una transformación tal que el centro de masa del cono sea el origen y encontrar los principales momentos de inercia.
12. Cuatro masas, todas de masa\(m\), se encuentran en el\(x − y\) plano en posiciones\((x, y)=(a, 0),(−a, 0),(0, +2a),(0, −2a)\). Estos están unidos por varillas sin masa para formar un cuerpo rígido
- Encuentra el tensor inercial, utilizando los\(x, y, z\) ejes como sistema de referencia. Exhibir el tensor como matriz.
- Considera una dirección dada por el vector unitario\(\hat{n}\) que se encuentra por igual entre los\(x, y, z\) ejes positivos; es decir, hace ángulos iguales con estas tres direcciones. Encuentra el momento de inercia para la rotación alrededor de este\(\hat{n}\) eje.
- Dado que en cierto momento\(t\) el vector de velocidad angular se encuentra a lo largo de la dirección anterior\(\hat{n}\), encontrar, para ese instante, el ángulo entre el vector de momento angular y\(\hat{n}\).
13. Un cubo homogéneo, cada borde del cual tiene una longitud\(l\), inicialmente se encuentra en una posición de equilibrio inestable con un borde del cubo en contacto con un plano horizontal. Luego se le da al cubo un pequeño desplazamiento haciendo que se vuelque y caiga. Mostrar que la velocidad angular del cubo cuando una cara golpea el plano viene dada por\[\omega^2 = A\frac{g}{l} \left( \sqrt{2} - 1 \right) \nonumber\] donde\(A = \frac{3}{2}\) si el borde no puede deslizarse sobre el plano, y donde\(A = \frac{12}{5}\) si el deslizamiento puede ocurrir sin fricción.
14. Un cuerpo simétrico se mueve sin la influencia de fuerzas o pares. Dejar\(x_3\) ser el eje de simetría del cuerpo y\(L\) estar a lo largo\(x^{\prime}_3\). El ángulo entre\(\omega\) y\(x_3\) es\(\alpha\). Dejar\(\omega\) e\(L\) inicialmente estar en el\(x_2 − x_3\) avión. ¿De qué se trata la velocidad angular del eje de simetría\(L\) en términos de\(I_1\)\(I_3\),\(\omega\), y\(\alpha\)?
15. Considera una placa rectangular delgada con dimensiones\(a\) por\(b\) y masa\(M\). Determinar el par necesario para girar la placa delgada con velocidad angular\(\omega\) alrededor de una diagonal. Explicar el comportamiento físico para el caso cuando\(a = b\).