
14.7: Sistemas de osciladores acoplados de dos cuerpos
- Page ID
- 126871
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
El oscilador acoplado de dos cuerpos es el sistema de oscilador acoplado más simple que ilustra las características generales de los osciladores acoplados. Los siguientes cuatro ejemplos involucran acoplamientos paralelos y en serie de dos osciladores lineales o péndula de dos planos.
Ejemplo\(\PageIndex{1}\): Two coupled linear oscillators
El problema del doble oscilador acoplado, Figura\(14.2.1\) discutida en capítulo\(14.2\), puede ser utilizado para demostrar que la teoría analítica general da la misma solución que la obtenida por solución directa de las ecuaciones de movimiento en el capítulo\(14.2\).
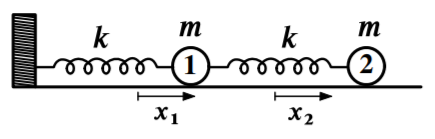
1) La primera etapa consiste en determinar las energías potenciales y cinéticas utilizando un conjunto apropiado de coordenadas generalizadas, que aquí son\(x_1\) y\(x_2\). La energía potencial es
\[U=\frac{1}{2} \kappa x_{1}^{2}+\frac{1}{2} \kappa x_{2}^{2}+\frac{1}{2} \kappa^{\prime}\left(x_{2} - x_{1}\right)^{2} = \frac{1}{2} \left( \kappa + \kappa^{\prime} \right) x_{1}^{2}+\frac{1}{2} \left( \kappa + \kappa^{\prime} \right) x_{2}^{2}-\kappa^{\prime} x_{1} x_{2} \nonumber\]
mientras que la energía cinética viene dada por
\[T = \frac{1}{2}m\dot{x}^2_1 + \frac{1}{2}m\dot{x}^2_2 \nonumber\]
2) La segunda etapa consiste en evaluar los\(T\) tensores de energía potencial\(V\) y energía cinética. El tensor de energía potencial\(V\) es no diagonal ya que\(V_{jk}\) da
\[V_{11} \equiv \left( \frac{\partial^{2} U}{\partial q_{1} \partial q_{1}} \right)_{0} = \kappa+\kappa^{\prime}=V_{22} \nonumber\]
\[V_{12} =\left( \frac{\partial^{2} U}{\partial q_{1} \partial q_{2}}\right)_{0}=-\kappa^{\prime}=V_{21} \nonumber\]
Es decir, el tensor de energía potencial\(V\) es
\[\mathbf{V} \begin{Bmatrix} \kappa + \kappa^{\prime} & -\kappa^{\prime} \\ -\kappa^{\prime} & \kappa + \kappa^{\prime} \end{Bmatrix} \nonumber\]
Del mismo modo, la energía cinética viene dada por
\[T = \frac{1}{2}m\dot{x}^2_1 + \frac{1}{2}m\dot{x}^2_2 = \frac{1}{2}\sum_{j,k} T_{jk}\dot{q}_j\dot{q}_k \nonumber\]
Desde\(T_{11} = T_{22} = m\) y\(T_{12} = T_{21} = 0\) entonces el tensor de energía cinética\(T\) es
\[\mathbf{T} \begin{Bmatrix} m & 0 \\ 0 & m \end{Bmatrix} \nonumber\]
Tenga en cuenta que para este caso, el tensor de energía cinética\(T\) es igual al tensor de masa, que es diagonal, mientras que el tensor de energía potencial es igual al tensor constante de resorte, que es no diagonal.
3) La tercera etapa consiste en utilizar los\(T\) tensores de energía potencial\(V\) y energía cinética para evaluar el determinante secular usando ecuaciones\((14.6.26)\)
\[\begin{vmatrix} \kappa + \kappa^{\prime} - m\omega^2 & -\kappa^{\prime} \\ -\kappa^{\prime} & \kappa + \kappa^{\prime} - m\omega^2 \end{vmatrix} = 0 \nonumber\]
La expansión de este determinante secular rinde
\[(\kappa + \kappa^{\prime} - m\omega^2)^2 - \kappa^{\prime 2} = 0 \nonumber\]
Eso es
\[(\kappa + \kappa^{\prime} - m\omega^2) = \pm\kappa^{\prime} \nonumber\]
Resolviendo para\(\omega_r\) da
\[\omega_r = \sqrt{\frac{\kappa + \kappa^{\prime} \pm \kappa^{\prime}}{m}} \nonumber\]
Las soluciones son
\[\omega_1 = \sqrt{\frac{\kappa + 2\kappa^{\prime}}{m}} \nonumber\]
\[\omega_2 = \sqrt{\frac{\kappa}{m}} \nonumber\]
que es lo mismo que se derivó anteriormente, (ecuaciones\((14.2.7-14.2.9)\)).
4) El cuarto paso es insertar cualquiera de estas frecuencias propias en la ecuación secular
\[\sum_j (V_{jk} - \omega^2_r T_{jk}) a_{jr} = 0 \nonumber\]
Considere la ecuación secular\(a\) para\(k = 1\)
\[( \kappa + \kappa^{\prime} − \omega^2_rM) a_{1r} − \kappa^{\prime} a_{2r} = 0 \nonumber\]
Entonces para la primera frecuencia propia\(\omega_1\), es decir\(k = 1\),\(r = 1\)
\[(\kappa + \kappa^{\prime} − \kappa − 2\kappa^{\prime} ) a_{11} − \kappa^{\prime} a_{21} = 0 \nonumber\]
lo que simplifica a
\[a_{jr} = a_{11} = −a_{21} \nonumber\]
De igual manera, para la otra frecuencia\(\omega_2\) propia, es decir\(k = 1\),\(r = 2\)
\[(\kappa + \kappa^{\prime} − \kappa ) a_{12} − \kappa^{\prime} a_{22} = 0 \nonumber\]
lo que simplifica a
\[a_{jr} = a_{12} = a_{22} \nonumber\]
5) La etapa final es escribir las coordenadas generales en términos de las coordenadas normales\(\eta_r (t) \equiv \beta_r e^{i\omega_r t}\). Así
\[x_1 = a_{11}\eta_1 + a_{12}\eta_2 = a_{11}\eta_1 + a_{22}\eta_2 \nonumber\]
y
\[x_2 = a_{21}\eta_1 + a_{22}\eta_2 = −a_{11}\eta_1 + a_{22}\eta_2 \nonumber\]
Sumando o restando da que los modos normales son
\[\eta_1 = \frac{1}{2a_{11}} (x_1 − x_2) \nonumber\]
\[\eta_2 = \frac{1}{2a_{22}} (x_2 + x_1) \nonumber\]
Así, el modo normal simétrico\(\eta_2\) corresponde a una oscilación del centro de masa con la frecuencia más baja\(\omega_2 = \sqrt{\frac{\kappa}{m}}\). Esta frecuencia es la misma que para una sola masa en un resorte de constante de resorte\(\kappa\) que es como se esperaba ya que vibran al unísono y así la fuerza del resorte de acoplamiento no actúa. El modo antisimétrico\(\eta_1\) tiene la frecuencia más alta\(\omega_1 = \sqrt{\frac{\kappa + 2\kappa^{\prime}}{m}}\) ya que la fuerza de restauración incluye tanto el resorte principal como el resorte de acoplamiento.
El ejemplo anterior ilustra que la teoría analítica general para osciladores lineales acoplados da la misma respuesta que se obtuvo en el capítulo\(14.2\) usando las ecuaciones de movimiento de Newton. Sin embargo, la teoría analítica general es una técnica más poderosa para resolver complicados sistemas de osciladores acoplados. Así, la teoría analítica general se utilizará para resolver todos los siguientes problemas de osciladores acoplados.
Ejemplo\(\PageIndex{2}\): Two equal masses series-coupled by two equal springs
Considere el sistema acoplado en serie que se muestra en la figura.
1) La primera etapa consiste en determinar las energías potenciales y cinéticas utilizando un conjunto apropiado de coordenadas generalizadas, que aquí son\(x_1\) y\(x_2\). La energía potencial es
\[U=\frac{1}{2} \kappa x_{1}^{2} +\frac{1}{2} \kappa \left(x_{2} - x_{1}\right)^{2} = \kappa x_{1}^{2}+\frac{1}{2} \kappa x_{2}^{2}-\kappa x_{1} x_{2} \nonumber\]
mientras que la energía cinética viene dada por
\[T = \frac{1}{2}m\dot{x}^2_1 + \frac{1}{2}m\dot{x}^2_2 \nonumber\]
2) La segunda etapa consiste en evaluar los\(T\) tensores potenciales de energía\(V\) y masa. El tensor de energía potencial\(V\) es no diagonal ya que\(V_{jk}\) da
\[V_{11} \equiv \left( \frac{\partial^{2} U}{\partial q_{1} \partial q_{1}} \right)_{0} = 2\kappa \nonumber\]
\[V_{12} =\left( \frac{\partial^{2} U}{\partial q_{1} \partial q_{2}}\right)_{0}=-\kappa =V_{21} \nonumber\]
\[V_{22} =\left( \frac{\partial^{2} U}{\partial q_{2} \partial q_{2}}\right)_{0}= \kappa \nonumber\]
Es decir, el tensor de energía potencial\(V\) es
\[\mathbf{V} \begin{Bmatrix} 2\kappa & -\kappa \\ -\kappa & \kappa \end{Bmatrix} \nonumber\]
Del mismo modo, dado que la energía cinética viene dada por
\[T = \frac{1}{2}m\dot{x}^2_1 + \frac{1}{2}m\dot{x}^2_2 = \frac{1}{2}\sum_{j,k} m_{jk}\dot{q}_j\dot{q}_k \nonumber\]
entonces\(T_{11} = T_{22} = m\) y\(T_{12} = T_{21} = 0\). Así, el tensor de energía cinética\(T\) es
\[\mathbf{T} \begin{Bmatrix} m & 0 \\ 0 & m \end{Bmatrix} \nonumber\]
Tenga en cuenta que para este caso el tensor de energía cinética es diagonal mientras que el tensor de energía potencial no es diagonal.
3) La tercera etapa consiste en utilizar los\(T\) tensores de energía potencial\(V\) y energía cinética para evaluar el determinante secular usando la ecuación\((14.6.26)\)
\[\begin{vmatrix} 2\kappa - m\omega^2 & -\kappa \\ -\kappa & \kappa - m\omega^2 \end{vmatrix} = 0 \nonumber\]
La expansión de este determinante secular rinde
\[( 2\kappa − m\omega^2) (\kappa − m\omega^2) − \kappa^2 = 0 \nonumber\]
Eso es
\[\omega^4 − 3 \frac{\kappa }{m} \omega^2 + \frac{\kappa^2}{m^2} = 0 \nonumber\]
Las soluciones son
\[\omega_1 = \frac{\sqrt{5}+1}{2}\sqrt{\frac{\kappa}{ m}} \quad \omega_2 = \frac{\sqrt{5}-1}{2} \sqrt{\frac{\kappa}{ m}} \nonumber\]
4) El cuarto paso es insertar estas frecuencias propias en la ecuación secular\((14.6.25)\)
\[\sum_j (V_{jk} - \omega^2_r T_{jk}) a_{jr} = 0 \nonumber\]
Considerar\(k = 1\) en la ecuación anterior
\[( 2\kappa − \omega^2_rM) a_{1r} − \kappa a_{2r} = 0 \nonumber\]
Entonces para la frecuencia propia\(\omega_1\), es decir,\(k = 1\),\(r = 1\)
\[\frac{\sqrt{5} − 1}{2} a_{11} = −a_{21} \nonumber\]
Del mismo modo, para\(k = 1\),\(r = 2\)
\[\frac{\sqrt{5} + 1}{2} a_{12} = a_{22} \nonumber\]
5) La etapa final es escribir las coordenadas generales en términos de las coordenadas normales\(\eta_r (t) \equiv \beta_re^{i\omega_rt}\).
Así
\[x_1 = a_{11}\eta_1 + a_{12}\eta_2 = a_{11}\eta_1 + \frac{2a_{22}}{ \sqrt{5} +1}\eta_2 \nonumber\]
y
\[x_2 = a_{21}\eta_1 + a_{22}\eta_2 = − \left(\frac{\sqrt{5} − 1}{2} \right) a_{11}\eta_1 + a_{22}\eta_2 \nonumber\]
Sumando o restando da que los modos normales son
\[\eta_1 = \frac{1}{a_{11} \sqrt{5}} \left( x_1 − \left(\frac{\sqrt{5} − 1}{ 2} \right) x_2 \right) \nonumber\]
\[\eta_2 = \frac{1}{a_{22} \sqrt{5}} \left( x_1 + \left(\frac{\sqrt{5} +1}{2} \right) x_2 \right) \nonumber\]
Así, el modo normal simétrico tiene la menor frecuencia\(\omega_2 = \frac{\sqrt{5} −1}{2} \sqrt{\frac{\kappa}{ m}}\). El modo antisimétrico tiene la frecuencia\(\omega_1 = \frac{\sqrt{5} +1}{2}\sqrt{\frac{\kappa}{m}}\) ya que ambos resortes proporcionan la fuerza restauradora. Este caso es interesante porque para ambos modos normales, las amplitudes para el movimiento de las dos masas son diferentes.
Ejemplo\(\PageIndex{3}\): Two parallel-coupled plane pendula
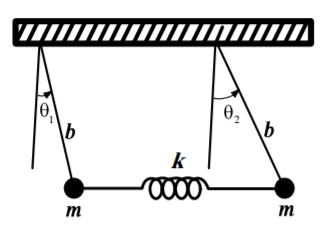
Consideremos el sistema de doble péndulo acoplado que se muestra en la figura adyacente, el cual comprende dos péndulos planos paralelos débilmente acoplados por un resorte. Los ángulos\(\theta_1\) y\(\theta_2\) se eligen para ser las coordenadas generalizadas y la energía potencial se elige para ser cero en equilibrio. Entonces la energía cinética es
\[T = \frac{1}{2} m \left( b\dot{\theta}_1 \right)^2 + \frac{1}{2} m \left( b\dot{\theta}_2 \right)^2 \nonumber\]
Como se discutió en el capítulo\(3\), es necesario hacer la aproximación de ángulo pequeño para que las ecuaciones de movimiento para el péndulo simple sean lineales y solucionables analíticamente. Es decir,
\ [\ begin {alineado} U &=m g b\ izquierda (1-\ cos\ theta_ {1}\ derecha) +m g b\ izquierda (1-\ cos\ theta_ {2}\ derecha) +\ frac {1} {2}\ kappa\ izquierda (b\ sin\ theta_ {1} -b\ sin\ theta_ {2}\ derecha) ^ {2}\\ &\ simeq\ frac {m g b} {2}\ izquierda (\ theta_ {1} ^ {2} +\ theta_ {2} ^ {2}\ derecha) +\ frac {\ kappa b^ {2}} {2}\ izquierda (\ theta_ {1} -\ theta_ {2}\ derecha) 2}
\ end {alineado}\]
asumiendo la aproximación de ángulo pequeño\(\sin \theta \approx \theta\) y\((1 − \cos \theta_1) = \frac{\theta^2}{2}\).
La segunda etapa es evaluar los\(V\) tensores de energía cinética\(T\) y energía potencial
\[\mathbf{T} = \begin{Bmatrix} mb^2 & 0 \\ 0 & mb^2 \end{Bmatrix} \quad \mathbf{V} = \begin{Bmatrix} mgb + \kappa b^2 & -\kappa b^2 \\ -\kappa b^2 & mgb + \kappa b^2 \end{Bmatrix} \nonumber\]
Tenga en cuenta que para este caso el tensor de energía cinética es diagonal mientras que el tensor de energía potencial no es diagonal.
La tercera etapa consiste en evaluar el determinante secular
\[\begin{vmatrix} mgb + \kappa b^2 - \omega^2mb^2 & -\kappa b^2 \\ -\kappa b^2 & mgb + \kappa b^2 - \omega^2mb^2 \end{vmatrix} = 0 \nonumber\]
que da la ecuación característica
\[( mgb + \kappa b^2 − \omega^2mb^2)^2 = ( \kappa b^2)^2 \nonumber\]
o
\[mg + \kappa b − \omega^2mb = \pm\kappa b \nonumber\]
Las dos soluciones son
\[\omega^2_1 = \frac{g}{b} \quad \omega^2_2 = \frac{g}{b} + \frac{2\kappa}{ m} \nonumber\]
El cuarto paso es insertar estas frecuencias propias en la ecuación\((14.6.25)\)
\[\sum_j (V_{jk} - \omega^2_r T_{jk}) a_{jr} = 0 \nonumber\]
Considerar\(k = 1\)
\[( mgb + \kappa b^2 − \omega^2_r mb^2) a_{1r} − \kappa b^2a_{2r} = 0 \nonumber\]
Entonces para la primera frecuencia propia,\(\omega_1\), los subíndices son\(k = 1\),\(r = 1\)
\[\left( mgb + \kappa b^2 − \frac{g}{b} mb^2 \right) a_{11} − \kappa b^2a_{21} = 0 \nonumber\]
lo que simplifica a
\[a_{11} = a_{21} \nonumber\]
Del mismo modo, para\(k = 1\),\(r = 2\)
\[\left( mgb + \kappa b^2 − \left(\frac{g}{b} + \frac{2\kappa}{m} \right) mb^2 \right) a_{12} − \kappa b^2a_{22} = 0 \nonumber\]
lo que simplifica a
\[a_{12} = −a_{22} \nonumber\]
La etapa final es escribir las coordenadas generales en términos de las coordenadas normales
\[\theta_1 = a_{11}\eta_1 + a_{12}\eta_2 = a_{11}\eta_1 − a_{22}\eta_2 \nonumber\]
y
\[\theta_2 = a_{21}\eta_1 + a_{22}\eta_2 = a_{11}\eta_1 + a_{22}\eta_2 \nonumber\]
Sumando o restando estas ecuaciones da que los modos normales son
\[\eta_1 = \frac{1}{2a_{11}} (\theta_1 + \theta_2) \quad \eta_2 = \frac{1}{2a_{22}} (\theta_2 − \theta_1) \nonumber\]
En cuanto al caso del oscilador doble discutido en el ejemplo\(\PageIndex{1}\), el modo normal simétrico corresponde a una oscilación del centro de masa, con movimiento relativo cero de las dos péndula, que tiene la menor frecuencia\(\omega_1 = \sqrt{\frac{g}{b}}\). Esta frecuencia es la misma que para un péndulo independiente como se esperaba ya que vibran al unísono y así la única fuerza restauradora es la gravedad. El modo antisimétrico corresponde al movimiento relativo de las dos péndula con centro de masa estacionario y tiene la frecuencia\(\omega_2 = \sqrt{(\frac{g}{b} + \frac{2\kappa}{ m })}\) ya que la fuerza restauradora incluye tanto el resorte de acoplamiento como la gravedad.
Este ejemplo introduce el papel de la degeneración que ocurre en este sistema si el acoplamiento de la péndula es cero, es decir\(\kappa = 0\), llevando a que ambas frecuencias sean iguales, i.e\(\omega_1 = \omega_2 = \sqrt{\frac{g}{b}}\). Cuando\(\kappa = 0\), entonces ambos\({\bf \{T\} }\) y\({\bf \{V\}}\) son diagonales y así en el\((\theta_1, \theta_2)\) espacio las dos péndula son modos normales independientes. Sin embargo, los modos normales simétricos y asimétricos, como se derivaron anteriormente, son modos normales igualmente buenos. De hecho, dado que los modos son degenerados, cualquier combinación lineal del movimiento de la péndula independiente son modos normales igualmente buenos y así se puede usar cualquier conjunto de modos normales ortogonales para describir el movimiento.
Ejemplo\(\PageIndex{4}\): The series-coupled double plane pendula
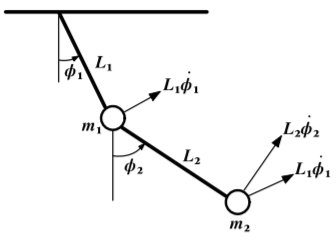
El sistema de doble péndula comprende un péndulo plano unido al extremo de otro péndulo plano, ambos oscilando en el mismo plano. Las energías cinéticas y potenciales para este sistema se dan en ejemplo\(6.12.1\) para ser
\ [\ begin {alineado}
T &=\ frac {1} {2}\ izquierda (m_ {1} +m_ {2}\ derecha) L_ {1} ^ {2}\ punto {\ phi} _ {1} ^ {2} +m_ {2} L_ {1} L_ {2}\ punto {\ phi} _ {1}\ punto {\ phi} _ {2}}\ cos\ izquierda (\ phi_ {1} -\ phi_ {2}\ derecha) +\ frac {1} {2} m_ {2} L_ {2} ^ {2}\ dot {\ phi} _ {2} ^ {2}\
U &=\ izquierda (m_ {1} +m_ {2}\ derecha) g L_ {1}\ izquierda (1-\ cos\ phi_ { 1}\ derecha) +m_ {2} g L_ {2}\ izquierda (1-\ cos\ phi_ {2}\ derecha)
\ final {alineado}\]
a) Régimen lineal de pequeña amplitud
El uso de la aproximación de ángulo pequeño hace que este sistema sea lineal y resoluble analíticamente. Es decir,\(T\) y\(U\) llegar a ser
\ [\ begin {alineado}
U &=\ frac {1} {2}\ izquierda (m_ {1} +m_ {2}\ derecha) g L_ {1}\ phi_ {1} ^ {2} +\ frac {1} {2} m_ {2} g L_ {2}\ phi_ {2} ^ {2}\
T &=\ frac {1} {2}\ izquierda (m_ {1} +m_ {2}\ derecha) L_ {1} ^ {2}\ punto {\ phi} _ {1} ^ {2} +m_ {2} L_ {1} L_ {2}\ punto {\ phi} _ {1}\ punto {\ phi} _ {2} +\ frac {1} {2} m_ {2} L_ {2} ^ {2}\ punto {\ phi} _ {2} ^ {2}
\ final {alineado}\]
Así, la energía cinética y los tensores de energía potencial son
\ [\ mathbf {T} =\ begin {Bmatrix}\ izquierda (m_ {1} +m_ {2}\ derecha) L_ {1} ^ {2} & m_ {2} L_ {1} L_ {2}\ m_ {2} L_ {1} L_ {2} & m_ {2} L_ {2} ^ {2}\ end {Bmatrix}\ quad\ mathbf {V} =\ begin {Bmatrix}\ izquierda (m_ {1} +m_ {2}\ derecha) g L_ {1} & 0\\
0 & m_ {2} g L_ {2}\ end {Bmatrix}\ nonumber\]
Obsérvese que\(\mathbf{T}\)\(\mathbf{V}\) es no diagonal, mientras que es diagonal que es opuesta al caso de las dos péndulos planas acopladas en paralelo.
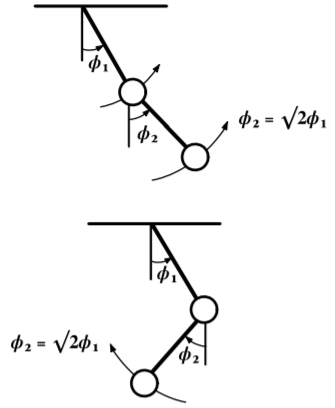
Figura\(\PageIndex{4}\): Modos normales para dos péndula plana acoplada en serie.
La solución de este caso es más sencilla si se supone que\(L_1 = L_2 = L\) y\(m_1 = m_2 = m\). Entonces
\[\mathbf{T} = mL^2 \begin{Bmatrix} 2 & 1 \\ 1 & 1 \end{Bmatrix} \quad \mathbf{V} = \begin{Bmatrix} 2\omega^2_0 & 0 \\ 0 & \omega^2_0 \end{Bmatrix} \nonumber\]
donde\(\omega_0 = \sqrt{\frac{g}{L}}\) que es la frecuencia de un solo péndulo.
La siguiente etapa es evaluar el determinante secular
\[mL^2 \begin{vmatrix} 2(\omega^2_0 − \omega^2) & −\omega^2 \\ −\omega^2 & (\omega^2_0 − \omega^2) \end{vmatrix} = 0 \nonumber\]
Los valores propios son
\[\omega^2_1 = (2 − \sqrt{2})\omega^2_0 \quad \omega^2_2 = (2 + \sqrt{ 2})\omega^2_0 \nonumber\]
Como se muestra en la figura adyacente, los modos normales para este sistema son
\[\eta_1 = \frac{1}{2a_{11}} (\phi_1 + \frac{\phi_2}{\sqrt{2}} ) \quad \eta_2 = \frac{1}{2a_{22}} (\phi_1 - \frac{\phi_2}{\sqrt{2}} ) \nonumber\]
La segunda masa tiene una amplitud\(\sqrt{2}\) mayor que está en fase para la solución 1 y fuera de fase para la solución 2.
b) Régimen caótico de gran amplitud
Stachowiak y Okada [Sta05] utilizaron simulaciones por computadora para analizar numéricamente el comportamiento de este sistema con aumento en las amplitudes de oscilación. Las secciones de Poincaré, los diagramas de bifurcación y los exponentes de Lyapunov confirman que este sistema evoluciona de un comportamiento oscilatorio regular en modo normal en régimen lineal a baja energía, a un comportamiento caótico a altas energías de excitación donde domina la no linealidad. Este comportamiento es análogo al del péndulo armónico impulsado, linealmente amortiguado descrito en el capítulo\(3.5\)