
14.8: Sistemas de osciladores lineales acoplados de tres cuerpos
- Page ID
- 126862
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Capítulo\(14.7\) discutió disposiciones paralelas y en serie de dos osciladores acoplados. Extendiéndose de dos a tres osciladores lineales acoplados introduce nuevas características interesantes de los sistemas de osciladores acoplados. Para más de dos osciladores acoplados, los sistemas de osciladores acoplados se separan en dos clasificaciones dependiendo de si cada oscilador está acoplado a\(n − 1\) los osciladores restantes, o cuando el acoplamiento es solo a los vecinos más cercanos como se ilustra a continuación.
Ejemplo\(\PageIndex{1}\): Three plane pendula; mean-field linear coupling

Considere tres péndulos idénticos con masa\(m\) y longitud\(b\), suspendidos de un soporte común que cede ligeramente al movimiento del péndulo que conduce a un acoplamiento entre las tres péndula como se ilustra en la figura adyacente. Supongamos que el movimiento de las tres péndula están todas en el mismo plano. Este caso es análogo al piano donde tres cuerdas en la sección de agudos están acopladas por el puente común ligeramente flexible más la placa de resonancia que conduce al acoplamiento entre cada uno de los tres osciladores acoplados. Este caso ilustra el importante concepto de degeneración.
Las coordenadas generalizadas son los ángulos\(\theta_1\),\(\theta_2\), y\(\theta_3\). Supongamos que el soporte rinde tal manera que el ángulo de deflexión real para el péndulo 1 es
\[\theta^{\prime}_1 = \theta_1 − \frac{\varepsilon}{2} (\theta_2 + \theta_3) \nonumber\]
donde el coeficiente de acoplamiento\(\varepsilon\) es pequeño e involucra a toda la péndula, no solo a los vecinos más cercanos. Supongamos que existe la misma relación de acoplamiento para las otras coordenadas angulares. La energía potencial gravitacional de cada péndulo viene dada por
\[U_1 = mgb (1 − \cos \theta_1) \approx \frac{1}{2} mgb \theta^2_1\nonumber\]
asumiendo la aproximación de ángulo pequeño. Ignorar términos de orden\(\varepsilon^2\) da que la energía potencial
\[U = \frac{mgb}{2} ( \theta^{\prime 2}_1 + \theta^{\prime 2}_2 + \theta^{\prime 2}_3 ) = \frac{mgb}{2} ( \theta^2_1 + \theta^2_2 + \theta^2_3 − 2\varepsilon\theta_1\theta_2 − 2\varepsilon\theta_1\theta_3 − 2\varepsilon\theta_2\theta_3 )\nonumber\]
La energía cinética evaluada en la ubicación de equilibrio es
\[T = \frac{1}{2} m \left( b\dot{\theta}_1 \right)^2 +\frac{1}{2} m \left( b\dot{\theta}_2 \right)^2 +\frac{1}{2} m \left( b\dot{\theta}_3 \right)^2 \nonumber\]
La siguiente etapa es evaluar los\(\mathbf{\{V\}}\) tensores\(\mathbf{\{T\}}\) y
\[\mathbf{T} = mb^2 \begin{Bmatrix} 1&0&0 \\ 0&1&0 \\ 0&0&1 \end{Bmatrix} \quad \mathbf{V} = mgb \begin{Bmatrix} 1 & −\varepsilon & −\varepsilon \\ −\varepsilon & 1 & −\varepsilon \\ −\varepsilon & −\varepsilon & 1 \end{Bmatrix}\nonumber\]
La tercera etapa consiste en evaluar el determinante secular que puede escribirse como
\[mgb \begin{vmatrix} 1 − \frac{b}{g} \omega^2 & −\varepsilon & −\varepsilon \\ −\varepsilon & 1 − \frac{b}{g} \omega^2 & −\varepsilon \\ −\varepsilon & −\varepsilon & 1 − \frac{b}{g} \omega^2 \end{vmatrix} = 0\nonumber\]
Expansión y factorización da
\[\left( \frac{b}{g} \omega^2 − 1 − \varepsilon \right) \left( \frac{b}{g} \omega^2 − 1 − \varepsilon \right) \left( \frac{b}{g} \omega^2 − 1+2\varepsilon \right) = 0\nonumber\]
Las raíces son
\[\omega_1 = \sqrt{\frac{g}{b}}\sqrt{1+\varepsilon} \quad \omega_2 = \sqrt{\frac{g}{b}}\sqrt{1+\varepsilon} \quad \omega_3 = \sqrt{\frac{g}{b}}\sqrt{1-2\varepsilon}\nonumber\]
Este caso da como resultado dos frecuencias propias degeneradas,\(\omega_1 = \omega_2\) mientras que\(\omega_3\) es la frecuencia propia más baja.
Los vectores propios se pueden determinar mediante la sustitución de las frecuencias propias en
\[\sum^n_j ( V_{jk} − \omega^2_r T_{jk}) a_{jr} = 0\nonumber\]
Considere la frecuencia propia más baja\(\omega_3\), es decir\(r = 3\), para\(k = 1\), y sustituto de\(\omega_3 = \sqrt{\frac{g}{b}}\sqrt{1-2\varepsilon}\) da
\[2\varepsilon a_{13} − \varepsilon a_{23} − \varepsilon a_{33} = 0\nonumber\]
mientras que para\(r = 3\),\(k = 2\)
\[−\varepsilon a_{13} + 2\varepsilon a_{23} − \varepsilon a_{33} = 0\nonumber\]
Resolver estos da
\[a_{13} = a_{23} = a_{33}\nonumber\]
Suponiendo que la función propia está normalizada a la unidad
\[a^2_{13} + a^{2}_{23} + a^2_{33} = 1\nonumber\]
luego para el tercer vector propio\(a_3\)
\[a_{13} = a_{23} = a_{33} = \frac{1}{\sqrt{3}}\nonumber\]
Esta solución corresponde a las tres péndula oscilando en fase con la misma amplitud, es decir, una oscilación coherente.
La derivación de las funciones propias para las otras dos frecuencias propias es complicada debido a la degeneración\(\omega_1 = \omega_2\), solo hay cinco ecuaciones independientes para especificar las seis incógnitas para los vectores propios\( a_{1}\) y\(a_{2}\). Es decir, los vectores propios pueden elegirse libremente siempre y cuando se satisfagan la ortogonalidad y la normalización. Por ejemplo, establecer\(a_{31} = 0\), para eliminar la indeterminación, da como resultado la\(\mathbf{a}\) matriz
\[\mathbf{\{a\}} = \begin{Bmatrix} \frac{ 1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6}& \frac{1}{3}\sqrt{3} \\ −\frac{1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6} & \frac{1}{3}\sqrt{3} \\ 0 & −\frac{1}{3} \sqrt{6} & \frac{1}{3}\sqrt{3} \end{Bmatrix}\nonumber\]
y así la solución viene dada por
\[\begin{Bmatrix} \theta_1 \\ \theta_2 \\ \theta_3 \end{Bmatrix} = \begin{Bmatrix} \frac{ 1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6}& \frac{1}{3}\sqrt{3} \\ −\frac{1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6} & \frac{1}{3}\sqrt{3} \\ 0 & −\frac{1}{3} \sqrt{6} & \frac{1}{3}\sqrt{3} \end{Bmatrix} \begin{Bmatrix} \eta_1 \\ \eta_2 \\ \eta_3 \end{Bmatrix}\nonumber\]
Los modos normales se obtienen tomando la matriz inversa\(\mathbf{\{a\}}^{−1}\) y usando\(\mathbf{\{\boldsymbol{\eta}\}} = \mathbf{\{a\}}^{−1} \mathbf{\{\boldsymbol{\theta}\}}\). Tenga en cuenta que dado que\(\mathbf{\{a\}}\) es real y ortogonal, entonces\(\mathbf{\{a\}}^{−1}\) equivale a la transposición de\(\mathbf{\{a\}}\). Es decir;
\[\begin{Bmatrix} \eta_1 \\ \eta_2 \\ \eta_3 \end{Bmatrix} = \begin{Bmatrix} \frac{ 1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6}& \frac{1}{3}\sqrt{3} \\ −\frac{1}{2} \sqrt{2} & \frac{1}{6} \sqrt{6} & \frac{1}{3}\sqrt{3} \\ 0 & −\frac{1}{3} \sqrt{6} & \frac{1}{3}\sqrt{3} \end{Bmatrix} \begin{Bmatrix} \theta_1 \\ \theta_2 \\ \theta_3 \end{Bmatrix}\nonumber\]
El modo normal\(\eta_3\) tiene frecuencia propia
\[\omega_3 = \sqrt{\frac{g}{b}} \sqrt{1- 2\varepsilon}\nonumber\]
y vector propio
\[\boldsymbol{\eta}_3 = \frac{1}{\sqrt{3}} (\theta_1, \theta_2, \theta_3)\nonumber\]
Esto corresponde a la oscilación en fase de las tres péndula.
Las otras dos soluciones degeneradas son
\[\boldsymbol{\eta}_1 = \frac{1}{\sqrt{2}} (\theta_1, −\theta_2, 0) \quad \boldsymbol{\eta}_2 = \frac{1}{\sqrt{6}} (\theta_1, \theta_2, −2\theta_3)\nonumber\]
con valores propios
\[\omega_1 = \omega_2 = \sqrt{\frac{g}{b}} \sqrt{ 1 + \varepsilon }\nonumber\]
Estos dos modos normales degenerados corresponden a dos péndula oscilando fuera de fase con la misma amplitud, o dos oscilando en fase con la misma amplitud y la tercera fuera de fase con el doble de amplitud. Un resultado importante de este modelo de juguete es que el modo más simétrico\(\eta_3\) se empuja lejos de todos los demás modos. Obsérvese que para este ejemplo, el modo coherente\(a_3\) corresponde a la oscilación del centro de masa sin movimiento relativo entre las tres péndula. Esto contrasta con los vectores propios\(a_1\) y\(a_2\) que ambos corresponden al movimiento relativo de la péndula de tal manera que hay un movimiento cero en el centro de masa. Este comportamiento de acoplamiento de campo medio es exhibido por el movimiento colectivo en los núcleos como se discute en el ejemplo\(14.12.1\).
Ejemplo\(\PageIndex{2}\): Three plane pendula; nearest-neighbor coupling
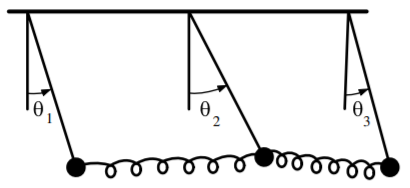
Existe una clase grande e importante de osciladores acoplados donde el acoplamiento es solo entre vecinos más cercanos; una celosía cristalina es un ejemplo clásico. Un modelo de juguete para tal sistema es el caso de tres péndula idénticas acopladas por dos muelles idénticos, donde solo se acoplan los vecinos más cercanos como se muestra en la figura adyacente. Supongamos que las péndula idénticas son de longitud\(b\) y masa\(m\). Como en el último ejemplo, la energía cinética evaluada en la ubicación de equilibrio es
\[T = \frac{1}{2} mb^2 \dot{\theta}^2_1 + \frac{1}{2} mb^2 \dot{\theta}^2_2 + \frac{1}{2} mb^2 \dot{\theta}^2_3\nonumber\]
La energía potencial gravitacional de cada péndulo es igual\(mgb (1 − \cos \theta) \approx \frac{1}{2}mgb \theta^2\) a
\[U_{grav} = \frac{1}{2} mgb (\theta^2_1 + \theta^2_2 + \theta^2_3)\nonumber\]
mientras que la energía potencial en los manantiales viene dada por
\[U_{spring} = \frac{1}{2} \kappa b^2 \left[ (\theta_2 − \theta_1)^2 + (\theta_3 − \theta_2)^2 \right] = \frac{1}{2} \kappa b^2 [ \theta^2_1 + 2\theta^2_2 + \theta^2_3 − 2\theta_1\theta_2 − 2\theta_2\theta_3 ]\nonumber\]
Así, la energía potencial total viene dada por
\[U = \frac{1}{2} mgb (\theta^2_1 + \theta^2_2 + \theta^2_3) + \frac{1}{2} \kappa b^2 [ \theta^2_1 + 2\theta^2_2 + \theta^2_3 − 2\theta_1\theta_2 − 2\theta_2\theta_3 ] \nonumber\]
El lagrangiano se convierte entonces
\[L = \frac{1}{2} mb^2 \left( \dot{\theta}^2_1 + \dot{\theta}^2_2 + \dot{\theta}^2_3 \right) − \frac{1}{2} ( mgb + \kappa b^2) \theta^2_1 + \frac{1}{2} ( mgb + 2\kappa b^2) \theta^2_2 + \frac{1}{2} ( mgb + \kappa b^2) \theta^2_3 − \kappa b^2 (\theta_1\theta_2 + \theta_2\theta_3)\nonumber\]
Usando esto en las ecuaciones de Euler-Lagrange da las ecuaciones de movimiento
\[mb^2\ddot{\theta}_1 − (mgb + \kappa b^2)\theta_1 + \kappa b^2\theta_2 = 0 \\ mb^2\ddot{\theta}_2 − (mgb + 2\kappa b^2)\theta_2 + \kappa b^2 (\theta_1 + \theta_3)=0 \\ mb^2\ddot{\theta}_3 − (mgb + \kappa b^2)\theta_3 + \kappa b^2\theta_2 = 0\nonumber\]
El enfoque analítico general requiere los tensores\(T\) y\(V\) energéticos dados por
\[\mathbf{T} = mb^2 \begin{Bmatrix} 1&0&0 \\ 0&1&0 \\ 0&0&1 \end{Bmatrix} \quad \mathbf{V} = \begin{Bmatrix} mgb + \kappa b^2 & −\kappa b^2 & 0 \\ −\kappa b^2 & mgb + 2\kappa b^2 & −\kappa b^2 \\ 0 & −\kappa b^2 & mgb + \kappa b^2 \end{Bmatrix} \nonumber\]
Tenga en cuenta que en contraste con el caso anterior de tres péndula totalmente acoplada, para el caso vecino más cercano el tensor de energía potencial\(\mathbf{\{V\}}\) es distinto de cero solo en la diagonal y\(\pm 1\) componentes paralelos a la diagonal.
La tercera etapa consiste en evaluar el determinante secular de la\(( \mathbf{V} − \omega^2 \mathbf{T} )\) matriz, es decir
\[\begin{vmatrix} mgb + \kappa b^2 − \omega^2 mb^2 & −\kappa b^2 & 0 \\ −\kappa b^2 & mgb + 2\kappa b^2 − \omega^2 mb^2 & −\kappa b^2 \\ 0 & −\kappa b^2 & mgb + \kappa b^2 − \omega^2 mb^2 \end{vmatrix} = 0\nonumber\]
Esto da como resultado la ecuación característica
\[( mgb − \omega^2 mb^2) (mgb + \kappa b^2 − \omega^2 mb^2) (mgb + 3\kappa b^2 − \omega^2 mb^2) = 0\nonumber\]
lo que da como resultado las tres frecuencias propias no degeneradas para los modos normales.

Los modos normales son similares al caso previo de acoplamiento lineal completo, como se muestra en la figura adyacente.
\(\omega_1 = \sqrt{\frac{g}{b}}\)Este modo más bajo\(\eta_1\) involucra a los tres péndulos oscilando en fase de tal manera que los resortes no se estiran ni comprimen así el periodo de esta oscilación coherente es el mismo que un péndulo independiente de masa\(m\) y longitud\(b\). Eso es
\[\boldsymbol{\eta}_1 = \frac{1}{\sqrt{3}} (\theta_1, \theta_2, \theta_3)\nonumber\]
\(\omega_2 = \sqrt{\frac{g}{b} + \frac{\kappa}{m}}\). Este segundo modo\(\eta_2\) tiene la masa central estacionaria con la péndula externa oscilando con la misma amplitud y fuera de fase. Eso es
\[\boldsymbol{\eta}_2 = \frac{1}{\sqrt{2}} (\theta_1, 0, −\theta_3)\nonumber\]
\(\omega_3 = \sqrt{\frac{g}{b} + \frac{3\kappa}{m}}\). Este tercer modo\(\eta_3\) involucra a la péndula externa en fase con la misma amplitud mientras que el péndulo central oscila con ángulo\(\theta_3 = −2\theta_1\). Eso es
\[\boldsymbol{\eta}_3 = \frac{1}{\sqrt{6}} (\theta_1, −2\theta_2, \theta_3)\nonumber\]
Similar al caso previo de tres péndula completamente acoplada, el modo normal coherente\(\boldsymbol{\eta}_1\) corresponde a una oscilación del centro de masa sin movimiento relativo, mientras que\(\boldsymbol{\eta}_2\) y\(\boldsymbol{\eta}_3\) corresponde al movimiento relativo de la péndula con movimiento estacionario del centro de masa. En contraste con el ejemplo anterior de acoplamiento completo, para el acoplamiento vecino más cercano las dos soluciones de mentira superior no son degeneradas. Es decir, las soluciones de acoplamiento vecino más cercano difieren de cuando todas las masas están acopladas linealmente.
Es interesante señalar que este ejemplo combina dos mecanismos de acoplamiento que pueden utilizarse para predecir las soluciones para dos casos extremos desconectando uno de estos mecanismos de acoplamiento. Desactivar los resortes de acoplamiento, mediante ajuste\(\kappa = 0\), hace que las tres frecuencias normales degeneren con\(\omega_1 = \omega_2 = \omega_3 = \sqrt{\frac{g}{b}}\). Esto corresponde a tres péndula idénticas independientes cada una con frecuencia\(\omega = \sqrt{\frac{g}{b}}\). También las tres combinaciones lineales\(\eta_1, \eta_2, \eta_3\) también tienen esta misma frecuencia, en particular\(\eta_1\) corresponde a una oscilación en fase de las tres péndula. Las tres péndula desacopladas son independientes y cualquier combinación de los tres modos está permitida ya que las tres frecuencias son degeneradas.
El otro extremo es dejar\(\frac{g}{b} = 0\), es decir apagar el campo gravitacional o dejar\(b \rightarrow \infty\), entonces el único acoplamiento se debe a los dos resortes. Esto se traduce en\(\omega_1 = 0\) que no hay una fuerza restauradora que actúe sobre el movimiento coherente de los tres osciladores acoplados en fase; como resultado, el movimiento oscilatorio no puede sostenerse ya que corresponde al centro de oscilación de masa sin fuerzas externas que actúen lo cual es espurio. Es decir, esta solución espuria corresponde a una traducción lineal constante.
Ejemplo\(\PageIndex{3}\): System of three bodies coupled by six springs

Considere el sistema mecánico completamente acoplado que se muestra en la figura adyacente.
1) La primera etapa consiste en determinar las energías potenciales y cinéticas utilizando un conjunto apropiado de coordenadas generalizadas, que aquí son\(x_1\) y\(x_2\). La energía potencial es la suma de las energías potenciales para cada uno de los seis resortes
\[U = \frac{3}{2}\kappa x^2_1 + \frac{3}{2}\kappa x^2_2 + \frac{3}{2}\kappa x^2_3 − \kappa x_1x_2 − \kappa x_1x_3 − \kappa x_2x_3\nonumber\]
mientras que la energía cinética viene dada por
\[T = \frac{1}{2} m\dot{x}^2_1 + \frac{1}{2} m\dot{x}^2_2 + \frac{1}{2} m\dot{x}^2_3\nonumber\]
2) La segunda etapa consiste en evaluar los\(T\) tensores de energía potencial\(V\) y energía cinética.
\[\mathbf{V} = \begin{Bmatrix} 3\kappa & −\kappa & −\kappa \\ −\kappa & 3\kappa & −\kappa \\ −\kappa & −\kappa & 3\kappa \end{Bmatrix} \quad \mathbf{ T} = \begin{Bmatrix} M & 0 & 0 \\ 0 & M & 0\\ 0 & 0 & M \end{Bmatrix}\nonumber\]
Tenga en cuenta que para este caso el tensor de energía cinética es diagonal mientras que el tensor de energía potencial no es diagonal y corresponde al acoplamiento completo de las tres coordenadas.
3) La tercera etapa consiste en utilizar los tensores de\(T\) energía potencial\(V\) y cinética para evaluar el determinante secular dando
\[\begin{vmatrix} ( 3\kappa − m\omega^2 ) & −\kappa & −\kappa \\ −\kappa & ( 3\kappa − m\omega^2 ) & −\kappa \\ −\kappa & −\kappa & ( 3\kappa − m\omega^2 ) \end{vmatrix} = 0\nonumber\]
La expansión de este determinante secular rinde
\[( \kappa − m\omega^2 ) (4\kappa − m\omega^2 ) (4\kappa − mM\omega^2 ) = 0\nonumber\]
La solución para este sistema de acoplamiento completo tiene dos valores propios degenerados.
\[\omega_1 = \omega_2 = 2 \sqrt{\frac{\kappa}{ m}} \quad \omega_3 = \sqrt{\frac{\kappa}{m}}\nonumber\]
4) El cuarto paso es insertar estas frecuencias propias en la ecuación secular
\[\sum_j ( V_{jk} − \omega^2_r T_{jk}) a_{jr} = 0\nonumber\]
para determinar los coeficientes\(a_{jr}\).
5) La etapa final es escribir las coordenadas generales en términos de las coordenadas normales.
El resultado es que la frecuencia angular\(\omega_3 = \sqrt{\frac{\kappa}{m}}\) corresponde a un modo normal para el cual las tres masas oscilan en fase correspondiente a una oscilación de centro de masa sin movimiento relativo de las masas.
\[\eta_3 = \frac{1}{\sqrt{3}} (x_1 + x_2 + x_3) \nonumber\]
Para este movimiento coherente solo se estira un resorte por masa dando como resultado la misma frecuencia que una masa en un resorte. Las otras dos soluciones corresponden a las tres masas oscilando fuera de fase, lo que implica que los tres resortes están estirados y así la frecuencia angular es mayor. Dado que los dos valores propios\(\omega_1 = \omega_2 = 2\sqrt{\frac{\kappa}{ m}}\) son degenerados, entonces solo hay cinco ecuaciones independientes para especificar las seis incógnitas para los autovalores degenerados. Por lo tanto, es posible seleccionar una combinación de los vectores propios\(\eta_1\) y de\(\eta_2\) tal manera que la combinación sea ortogonal a\(\eta_3\). Elige\(a_{31} = 0\) eliminar la indeterminación. Luego sumar o restar da que los modos normales son
\[\eta_1 = \frac{1}{\sqrt{2}} (x_1 − x_2 + 0) \quad \eta_2 = \frac{1}{\sqrt{2}} (x_1 + x_2 − 2x_3)\nonumber\]
Estos dos modos normales degenerados corresponden al movimiento relativo de las masas con centro de masa estacionario.