
15.2: Soporte de Poisson Representación de Mecánica Hamiltoniana
- Page ID
- 126981
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Soportes Poisson
Los brackets de Poisson fueron desarrollados por Poisson, quien era estudiante de Lagrange. Las ecuaciones canónicas de movimiento de Hamilton describen la evolución temporal de las variables canónicas\((q,p)\) en el espacio de fase. Jacobi demostró que el marco de la mecánica hamiltoniana puede replantearse en términos del elegante y poderoso formalismo de corchetes de Poisson. La representación del soporte de Poisson de la mecánica hamiltoniana proporciona un vínculo directo entre la mecánica clásica y la mecánica cuántica.
El corchete de Poisson de cualquiera de dos funciones continuas de coordenadas generalizadas\(F(p, q)\) y\(G(p, q)\), se define como
\[\{F,G\}_{qp} \equiv \sum_i \left(\frac{\partial F}{\partial q_i} \frac{\partial G} {\partial p_i} − \frac{\partial F} {\partial p_i }\frac{\partial G} {\partial q_i} \right) \label{15.12}\]
Tenga en cuenta que la definición anterior del corchete de Poisson, escrita usando la notación de corsé común, conduce a la siguiente identidad, antisimetría, linealidad, reglas de Leibniz e Identidad Jacobi.
\[\begin{align} \{F, F\} &= 0 \\[4pt] \{F,G\} &= − \{G, F\} \\[4pt] \{G, F + Y \} &= \{G, F\}+\{G, Y \} \\[4pt] \{G, F Y \} &= \{G, F\} Y + F \{G, Y \} \\[4pt] 0 &= \{F, \{G, Y \}\} + \{G, \{Y,F\}\} + \{Y \{F,G\}\} \label{15.17} \end{align}\]
donde\(G\),\(H\), y\(Y\) son funciones de las variables canónicas más tiempo. La identidad de Jacobi;\ ref {15.17} establece que la suma de la permutación cíclica de los corchetes dobles de Poisson de tres funciones es cero. La identidad de Jacobi juega un papel útil en la mecánica hamiltoniana como se mostrará.
Soportes de Poisson Fundamentales
Los corchetes de Poisson de las propias variables canónicas se denominan corchetes de Poisson fundamentales. Ellos son
\[ \{q_k, q_l\}_{qp} = \sum_i \left(\frac{\partial q_k}{ \partial q_i} \frac{\partial q_l}{\partial p_i} − \frac{\partial q_k}{ \partial p_i} \frac{\partial q_l}{ \partial q_i} \right) = \sum_i (\delta_{ki} \cdot 0 − 0 \cdot \delta_{li}) = 0 \]
\[ \{p_k, p_l\}_{qp} = \sum_i \left(\frac{\partial p_k }{\partial q_i} \frac{\partial p_l}{ \partial p_i} − \frac{\partial p_k }{\partial p_i} \frac{\partial p_l}{ \partial q_i } \right) = \sum_i (0 \cdot \delta_{li} − \delta_{ki} \cdot 0) = 0 \]
\[ \{q_k, p_l\}_{qp} = \sum_i \left(\frac{\partial q_k}{ \partial q_i} \frac{\partial p_l}{ \partial p_i} − \frac{\partial q_k}{ \partial p_i} \frac{\partial p_l}{ \partial q_i} \right) = \sum_i (\delta_{ki} \cdot \delta_{li} − 0 \cdot 0) = \delta_{kl} \]
En resumen, los corchetes fundamentales de Poisson son iguales
\[ \{q_k, q_l\}_{qp} = 0 \]
\[ \{p_k, p_l\}_{qp} = 0 \]
\[ \{q_k, p_l\}_{qp} = − \{p_l, q_k\}_{qp} = \delta_{kl} \]
Tenga en cuenta que el corchete de Poisson es antisimétrico bajo intercambio en\(p\) y\(q\). Es interesante que el único corchete de Poisson fundamental distinto de cero es para variables conjugadas donde\(k = l\), es decir
\[ \{q_k, p_k\}_{pq} = 1 \]
Invarianza de corchetes de Poisson a transformaciones canónicas
Los corchetes de Poisson son invariantes bajo una transformación canónica de un conjunto de variables canónicas\((q_k, p_k)\) a un nuevo conjunto de variables canónicas\((Q_k, P_k)\) donde\(Q_k \rightarrow Q_k(\mathbf{q}, \mathbf{p})\) y\(P_k \rightarrow P_k(\mathbf{q}, \mathbf{p})\). Esto se muestra transformando la Ecuación\ ref {15.12} a las nuevas variables mediante la siguiente derivación
\[\begin{align} \{F,G\}_{qp} & = \sum_{j} \left( \frac{\partial F}{ \partial q_j} \frac{\partial G} {\partial p_j} − \frac{\partial F} {\partial p_j} \frac{\partial G} {\partial q_j} \right) \label{15.25} \\[4pt] & = \sum_{jk} \left( \frac{\partial F}{ \partial q_j }\left( \frac{\partial G}{ \partial Q_k }\frac{\partial Q_k }{\partial p_j} + \frac{\partial G} {\partial P_k }\frac{\partial P_k}{ \partial p_j} \right) − \frac{\partial F}{ \partial p_j} \left( \frac{\partial G} {\partial Q_k} \frac{\partial Q_k}{ \partial q_j} + \frac{\partial G}{ \partial P_k }\frac{\partial P_k} {\partial q_j} \right)\right) \label{15.26}\end{align}\]
Los términos se pueden reorganizar para dar
\[ \{F,G\}_{qp} = \sum_k \left( \frac{\partial G}{ \partial Q_k} \{F, Q_k\}_{qp} + \frac{\partial G}{ \partial P_k} \{F, P_k\}_{qp}\right) \label{15.27}\]
Dejar\(F = Q_k\) y reemplazar\(G\) por\(F\), y usar el hecho de que los corchetes fundamentales de Poisson\(\{Q_k, Q_j \}_{qp} = 0\) y\(\{Q_k, P_j \}_{qp} = \delta_{jk}\), luego Ecuación\ ref {15.25} reduce a
\[ \{Q_k, F\}_{qp} = \sum_j \left( \frac{\partial F}{ \partial Q_j} \{Q_k, Q_j \} + \frac{\partial F} {\partial P_j } \{Q_k, P_j \} \right) = \sum_j \frac{\partial F}{ \partial P_j} \delta_{jk} \]
Eso es
\[ \{F, Q_k\} = − \frac{\partial F} {\partial P_k} \label{15.29}\]
Del mismo modo
\[ \{P_k, F\}_{qp} = \sum_j \left( \frac{\partial F}{ \partial Q_j} \{P_k, Q_j \}_{qp} + \frac{\partial F}{ \partial P_j} \{P_k, P_j \}_{qp} \right) \]
lo que lleva a
\[ \{F, P_k\}_{qp} = \frac{\partial F} {\partial Q_k} \label{15.31}\]
Sustituyendo ecuaciones\ ref {15.29} y\ ref {15.31} en Ecuación\ ref {15.27} da
\[ \{F,G\}_{qp} = \sum_k \left( \frac{\partial F} {\partial Q_k} \frac{\partial G}{ \partial P_k} − \frac{\partial F} {\partial P_k} \frac{\partial G} {\partial Q_k} \right) = \{F,G\}_{QP} \]
Así, la variable canónica subíndices\((q,p)\) y\((Q,P)\) puede ser ignorada ya que el corchete de Poisson es invariante a cualquier transformación canónica de variables canónicas. El argumento contrario es que si el corchete de Poisson es independiente de la transformación, entonces la transformación es canónica.
Ejemplo\(\PageIndex{1}\): Check that a transformation is canonical
La independencia de los corchetes de Poisson a las transformaciones canónicas se puede utilizar para probar si una transformación es canónica. Supongamos que las ecuaciones de transformación entre dos conjuntos de coordenadas vienen dadas por
\[Q = \ln \left( 1 + q^{\frac{1}{2}} \cos p \right) \quad P = 2 \left( 1 + q^{\frac{1}{2}} \cos p \right) q^{\frac{1}{2}} \sin p \nonumber\]
Evaluar los corchetes de Poisson da\(\{Q, Q\} = 0\),\(\{P, P\} = 0\) mientras
\[\begin{aligned} \{Q, P\} & = \frac{\partial Q}{ \partial q} \frac{\partial P}{ \partial p} − \frac{\partial P}{ \partial q} \frac{\partial Q}{ \partial p} \\ & = \frac{q^{−\frac{ 1}{ 2}} \cos p}{ 1 + q^{\frac{1}{2}} \cos p} [−q \sin^2 p + (1 + q^{\frac{1}{2}} \cos p) q^{\frac{1}{2}} \cos p] + \frac{q^{\frac{1}{2}} \sin^2 p}{ 1 + q^{\frac{1}{2}} \cos p } [\cos p + (1 + q^{\frac{1}{2}} \cos p) q^{− \frac{1}{ 2}} ] = 1 \end{aligned}\]
Por lo tanto si\(q, p\) son canónicos con un corchete de Poisson\(\{q, p\} = 1\), entonces también lo son\(Q, P\) desde\(\{Q, P\} = 1 = \{q, p\}\).
Ya que se ha demostrado que esta transformación es canónica, es posible ir más allá y determinar la función que genera esta transformación. Resolviendo las ecuaciones de transformación para\(q\) y\(p\) dar
\[q = \left( e^Q − 1 \right)^2 \sec^2 p \quad P = 2e^Q \left( e^Q − 1 \right) \tan p \nonumber\]
Dado que la transformación es canónica, existe una función generadora\(F_3 (Q, p)\) tal que
\[q = −\frac{\partial F_3}{ \partial p} \quad P = −\frac{\partial F_3}{ \partial Q} \nonumber\]
La función de transformación se\(F_3 (Q, p)\) puede obtener usando
\[\begin{aligned} dF_3(Q, p) = \frac{\partial F_3}{ \partial Q} dQ + \frac{\partial F_3}{ \partial p }dp = −P dQ − qdp \\ = −d \left[\left( e^Q − 1 \right)^2 \right] \tan p − \left( e^Q − 1 \right)^2 d \tan p = −d \left[\left( e^Q − 1 \right)^2 \tan p \right] \end{aligned}\]
Esto da entonces que la función generadora requerida es
\[F_3(Q, p) = \left( e^Q − 1 \right)^2 \tan p \nonumber\]
Este ejemplo ilustra cómo determinar una función generadora útil y demostrar que la transformación es canónica.
Correspondencia del Conmutador y el Bracket de Poisson
En la mecánica clásica existe una correspondencia formal entre el soporte de Poisson y el conmutador. Esto se puede mostrar derivando el Bracket de Poisson de cuatro funciones tomadas en dos pares. La derivación requiere derivar los dos posibles Brackets de Poisson que involucran tres funciones.
\[ \begin{align} \{F_1F_2, G\} & = \sum_j \left[ \left(\frac{\partial F_1}{ \partial q_j } F_2 + F_1 \frac{\partial F_2}{ \partial q_j} \right) \frac{\partial G} {\partial p_j} − \left(\frac{\partial F_1}{ \partial p_j} F_2 + F_1 \frac{\partial F_2}{ \partial p_j} \right) \frac{\partial G}{ \partial q_j} \right] \\[4pt] &= \{F_1, G\} F_2 + F_1 \{F_2, G\} \label{15.33} \end{align}\]
\[ \{F,G_1G_2\} = \{F,G_1\} G_2 + G_1 \{F,G_2\} \label{15.34}\]
Estos dos Brackets de Poisson para tres funciones se pueden utilizar para derivar el Bracket de Poisson de cuatro funciones, tomadas en pares. Esto se puede lograr de dos maneras usando la Ecuación\ ref {15.33} o\ ref {15.34}.
\[ \{F_1F_2, G_1G_2\} = \{F_1, G_1G_2\} F_2 + F_1 \{F_2, G_1G_2\} \\ = [ \{F_1, G_1\} G_2 + G_1 \{F_1, G_2\} ] F_2 + F_1 [\{F_2, G_1\} G_2 + G_1 \{F_2, G_2\}] \\ = \{F_1, G_1\} G_2F_2 + G_1 \{F_1, G_2\} F_2 + F_1 \{F_2, G_1\} G_2 + F_1G_1 \{F_2, G_2\} \label{15.35}\]
El enfoque alternativo da
\[ \{F_1F_2, G_1G_2\} = \{F_1F_2,G_1\} G_2 + G_1 \{F_1F_2, G_2\} \\ = \{F_1, G_1\} F_2G_2 + F_1 \{F_2, G_1\} G_2 + G_1 \{F_1, G_2\} F_2 + G_1F_1 \{F_2, G_2\} \label{15.36}\]
Estas dos derivaciones alternas dan relaciones diferentes para el mismo Bracket de Poisson. Equiparar las ecuaciones alternativas\ ref {15.35} y\ ref {15.36} da que
\[ \{F_1, G_1\} (F_2G_2 − G_2F_2) = (F_1G_1 − G_1F_1) \{F_2, G_2\} \nonumber\]
Esto se puede factorizar en relaciones separadas, el lado izquierdo para el cuerpo 1 y el lado derecho para el cuerpo 2.
\[\frac{(F_1G_1 − G_1F_1)}{ \{F_1, G_1\}} = \frac{(F_2G_2 − G_2F_2)}{ \{F_2, G_2\} } = \lambda \]
Dado que la relación de la izquierda se mantiene para\(F_1, G_1\) independiente de\(F_2, G_2\), y viceversa, entonces deben ser iguales a una constante\(\lambda\) que no depende\(F_1, G_1\), no depende de\(F_2, G_2\), y\(\lambda\) debe conmutar con\((F_1G_1 − G_1F_1)\). Es decir,\(\lambda\) debe ser un número constante independiente de estas variables.
\[(F_1G_1 − G_1F_1) = \lambda \{F_1, G_1\} \equiv \lambda \sum_i \left(\frac{\partial F_1}{ \partial q_i} \frac{\partial G_1 }{\partial p_i} − \frac{\partial F_1 }{\partial p_i }\frac{\partial G_1}{ \partial q_i} \right) \label{15.38}\]
La ecuación\ ref {15.38} es un resultado especialmente importante que establece que dentro de un número constante multiplicativo\(\lambda\), hay una correspondencia uno a uno entre el Bracket de Poisson y el conmutador de dos funciones independientes. Una implicación importante es que si dos funciones,\(F_iG_k\) tienen un Bracket de Poisson que es cero, entonces el conmutador de las dos funciones también debe ser cero, es decir,\(F_i\) y\(G_k\) conmutar.
Considerar el caso especial donde las variables\(F_1\) y\(G_1\) corresponden a las variables canónicas fundamentales,\((q_k, p_l)\). Luego los conmutadores de las variables canónicas fundamentales son dados por
\[q_kp_l − p_lq_k = \lambda \{q_k, p_l\} = \lambda\delta_{kl} \]
\[q_kq_l − q_lq_k = \lambda \{q_k, q_l\} = 0 \]
\[p_kp_l − p_lp_k = \lambda \{p_k, p_l\} = 0 \]
En 1925, Paul Dirac, un estudiante graduado de 23 años en Bristol, reconoció que la correspondencia formal entre el soporte de Poisson en mecánica clásica, y el conmutador correspondiente, proporciona una manera lógica y consistente de cerrar el abismo entre la formulación hamiltoniana de la mecánica clásica, y mecánica cuántica. Se dio cuenta de que hacer la suposición de que la constante\(\lambda \equiv i\hbar\), conduce a las relaciones fundamentales de conmutación de Heisenberg en la mecánica cuántica, como se discute en el capítulo\(18.3.1\). Suponiendo que eso\(\lambda \equiv i\hbar\) proporciona una manera lógica y consistente que construye la cuantificación directamente en la mecánica clásica, en lugar de usar hipótesis ad-hoc, dependientes de casos, como fue utilizada por la teoría cuántica más antigua de Bohr.
Observables en mecánica hamiltoniana
Los corchetes de Poisson y las correspondientes relaciones de conmutación son especialmente útiles para dilucidar qué observables son constantes de movimiento, y si dos observables pueden medirse simultáneamente y exactamente. Las propiedades de cualquier observable están determinadas por los dos criterios siguientes.
Dependencia del tiempo:
El diferencial de tiempo total de una función\(G (q_i, p_i, t)\) se define por
\[\frac{dG}{ dt} = \frac{\partial G}{ \partial t} +\sum_i \left(\frac{\partial G} {\partial q_i} \dot{q}_i + \frac{\partial G}{ \partial p_i} \dot{p}_i \right) \]
Las ecuaciones canónicas de Hamilton dan eso
\[\dot{q}_i = \frac{\partial H}{ \partial p_i} \]
\[\dot{p}_i = −\frac{\partial H}{ \partial q_i }\]
Sustituyendo estos en la relación anterior da
\[\frac{dG}{ dt} = \frac{\partial G} {\partial t} +\sum_i \left(\frac{\partial G} {\partial q_i} \frac{\partial H}{ \partial p_i} − \frac{\partial G}{ \partial p_i} \frac{\partial H}{ \partial q_i} \right) \nonumber\]
es decir
\[\frac{dG }{dt} = \frac{\partial G}{ \partial t} + \{G, H\} \label{15.45}\]
Esta importante ecuación establece que la derivada de tiempo total de cualquier función\(G(q, p, t)\) puede expresarse en términos de la derivada de tiempo parcial más el corchete de Poisson de\(G(q, p, t)\) con el hamiltoniano.
Cualquier observable\(G(p, q, t)\) será una constante de movimiento si\(\frac{dG}{ dt} = 0\), y así la Ecuación\ ref {15.45} da
\[\frac{\partial G} {\partial t} + \{G, H\} = 0 \tag{If \(G\) is a constant of motion}\]
Es decir, es una constante de movimiento cuando
\[\frac{\partial G}{ \partial t} = \{H, G\} \]
Además, esto se puede extender aún más a la afirmación de que si la constante de movimiento\(G\) no depende explícitamente del tiempo, entonces
\[ \{G, H\} = 0 \]
El paréntesis de Poisson con el hamiltoniano es cero para una constante de movimiento\(G\) que no depende explícitamente del tiempo. Muchas veces es más útil darle la vuelta a esta afirmación con la afirmación de que si\(\{G, H\} = 0\), y\(\frac{\partial G} {\partial t} = 0\), entonces\(\frac{dG}{dt} = 0\), implicando que\(G\) es una constante de movimiento.
Independencia
Considerar dos observables\(F(p, q, t)\) y\(G(p, q, t)\). La independencia de estos dos observables está determinada por el grupo de Poisson
\[ \{F,G\} = − \{G, F\} \]
Si este corchete de Poisson es cero, es decir, si los dos observables\(F(p, q, t)\) y\(G(p, q, t)\) conmutan, entonces sus valores son independientes y se pueden medir de forma independiente. Sin embargo, si el corchete de Poisson\(\{F,G\} \neq 0\), es decir\(F(p, q, t)\) y\(G(p, q, t)\) no conmutan, entonces\(F\) y\(G\) se correlacionan ya que intercambiando el orden del corchete de Poisson cambia el signo lo que implica que el valor medido para\(F\) depende de si\(G\) es medido simultáneamente.
Una propiedad útil de los corchetes de Poisson es que si\(F\) y\(G\) ambos son constantes de movimiento, entonces el corchete de Poisson doble\(\{H, \{F,G\}\} = 0\). Esto se puede probar usando la identidad de Jacobi
\[ \{F, \{G, H\}\} + \{G, \{H, F\}\} + \{H, \{F,G\}\} = 0 \label{15.49}\]
Si\(\{G, H\} = 0\) y\(\{F,H\} = 0\), entonces\(\{H, \{F,G\}\} = 0\), es decir, el soporte de Poisson\(\{F,G\}\) viaja con\(H\). Tenga en cuenta que si\(F\) y\(G\) no dependen explícitamente del tiempo, es decir\(\frac{\partial F}{ \partial t} = \frac{\partial G}{ \partial t} = 0\), entonces combinar las ecuaciones\ ref {15.45} y\ ref {15.49} conduce al Teorema de Poisson que relaciona las derivadas del tiempo total.
\[\frac{d}{ dt} \{F,G\} = \left\{ \frac{dF}{ dt} , G\right\} + \left\{ F, \frac{dG}{ dt} \right\} \]
Esto implica que si\(F\) y\(G\) son invariantes, es decir\(\frac{dF}{ dt} = \frac{dG}{ dt} = 0\), entonces el corchete de Poisson\(\{F,G\}\) es un invariante si\(F\) y no\(G\) son explícitamente dependientes del tiempo.
Ejemplo\(\PageIndex{2}\): Angular momentum
Momentum angular\(L\),, proporciona un ejemplo del uso de corchetes de Poisson para dilucidar qué observables se pueden determinar simultáneamente. Considerar que el hamiltoniano es independiente del tiempo con un potencial esféricamente simétrico\(U(r)\). Entonces lo mejor es tratar tal potencial esféricamente simétrico usando coordenadas esféricas ya que el hamiltoniano es independiente de ambos\(\theta\) y\(\phi\).
Los Brackets de Poisson en mecánica clásica se pueden utilizar para decirnos si dos observables se desplazarán. Dado que\(U(r)\) es independiente del tiempo, entonces el hamiltoniano en coordenadas esféricas es
\[H = T + U = \frac{1}{2m} \left( p^2_{r} + \frac{p^2_{\theta}}{r^2} + \frac{p^2_{\phi}}{ r^2 \sin^2 \theta} \right) + U(r) \nonumber\]
Evaluar el corchete de Poisson usando los anteriores resultados hamiltonianos
\[ \{p_{\phi}, H\} = 0 \nonumber\]
Ya que no\(p_{\phi}\) es una función explícita del tiempo\(\frac{\partial p_{\phi}}{ \partial t} = 0\), entonces\(\frac{dp_{\phi}}{ dt} = 0\), es decir, el momento angular alrededor del\(z\) eje\(L_z = p_{\phi}\) es una constante de movimiento.
El soporte de Poisson del momento angular total\(L^2\) conmuta con el hamiltoniano, es decir
\[ \{ L^2, H\} = \left\{ p^2_{\theta} + \frac{p^2_{\phi}}{ \sin^2 \theta }, H\right\} = 0 \nonumber\]
Dado que el momento\(L^2 = p^2_{\theta} + \frac{p^2_{\phi}}{ \sin^2 \theta}\) angular total no depende explícitamente del tiempo, entonces también debe ser una constante de movimiento. Tenga en cuenta que el teorema de Noether da que tanto el momento\(L^2\) angular como\(L_z\) las constantes de movimiento son. También dado que los corchetes de Poisson son
\[ \{L_z, H\} = 0 \nonumber\]
\[ \{ L^2, H\} = 0 \nonumber\]
entonces la identidad de Jacobi, Ecuación\ ref {15.17}, puede usarse para dar a entender que
\[ \{H, \{ L^2, L_z \} \} = 0 \nonumber\]
Es decir, el soporte de Poisson\(\{ L^2, L_z \}\) es una constante de movimiento. Tenga en cuenta que si\(L^2\) y\(L_z\) conmutar, es decir\(\{ L^2, L_z \} = 0\),, entonces se pueden medir simultáneamente con precisión ilimitada, y esto también satisface que\(\{ L^2, L_z \}\) conmuta con\(H\).
Los\((x,y,z)\) componentes del momento angular\(L\) vienen dados por
\[L_x = \sum^n_{i = 1} (\mathbf{r} \times \mathbf{p})_x = \sum^n_{i = 1} (y_ip_{z,i} − z_ip_{y,i}) \nonumber\]
\[L_y = \sum^n_{i = 1} (\mathbf{r} \times \mathbf{p})_y = \sum^n_{i = 1} (z_ip_{x,i} − x_ip_{z,i}) \nonumber\]
\[L_z = \sum^n_{i = 1} (\mathbf{r} \times \mathbf{p})_z = \sum^n_{i = 1} (x_ip_{y,i} − y_ip_{x,i}) \nonumber\]
Evaluar el soporte de Poisson
\[\begin{aligned} \{L_x, L_y\} = \sum^n_{i = 1} \left[\left(\frac{\partial L_x}{ \partial x_i}\frac{ \partial L_y}{ \partial p_{x,i}} − \frac{\partial L_x }{\partial p_{x,i}} \frac{\partial L_y}{ \partial x_i} \right) + \left(\frac{\partial L_x}{ \partial y_i}\frac{ \partial L_y}{ \partial p_{y,i}} − \frac{\partial L_x }{\partial p_{y,i}} \frac{\partial L_y}{ \partial y_i} \right) + \left(\frac{\partial L_x }{\partial z_i} \frac{\partial L_y}{ \partial p_{z,i}} − \frac{\partial L_x}{ \partial p_{z,i}} \frac{\partial L_y}{ \partial z_i} \right)\right] \\ = \sum^n_{i = 1} [(0) + (0) + (x_ip_{y,i} − y_ip_{x,i})] = L_z \end{aligned}\]
Del mismo modo, los soportes de Poisson para\(L_x, L_y, L_z\)
\[ \{L_x, L_y\} = L_z \nonumber\]
\[ \{L_y, L_z\} = L_x \nonumber\]
\[ \{L_z, L_x\} = L_y \nonumber\]
donde\(x\),\(y\), y\(z\) se toman en orden cíclico diestro. Esto suele estar escrito en la forma
\[ \{L_i, L_j \} = \epsilon_{ijk}L_k \nonumber\]
donde la densidad de Levi-Civita\(\epsilon_{ijk}\) es igual a cero si dos de los\(ijk\) índices son idénticos, de lo contrario es +1 para una permutación cíclica de\(i, j, k\), y −1 para una permutación no cíclica.
Tenga en cuenta que dado que estos soportes de Poisson son distintos de cero, los componentes del momento angular\(L_x, L_y, L_z\) no se desplazan y por lo tanto simultáneamente no se pueden medir con precisión. Así vemos que aunque\(L^2\) y\(L_i\) son constantes simultáneas de movimiento, donde el subíndice\(i\) puede ser o bien\(x\)\(y\), o\(z\), solo un componente\(L_i\) puede medirse simultáneamente con\(L^2\). Este comportamiento se exhibe por la rotación de cuerpo rígido donde el cuerpo precede alrededor de un componente del momento angular total\(L_z\), de tal manera que el momento angular total\(L^2\), más el componente a lo largo de un eje,\(L_z\) son constantes de movimiento. Entonces\(L^2_x + L^2_y = L^2 − L^2_z\) es constante pero no el individuo\(L_x\) o\(L_y\).
Ecuaciones de movimiento de Hamilton
Una aplicación especialmente importante de los corchetes de Poisson es que las ecuaciones canónicas de movimiento de Hamilton se pueden expresar directamente en forma de corchete de Poisson. La representación del soporte de Poisson de la mecánica hamiltoniana tiene importantes implicaciones para la mecánica cuántica, como se describirá en el capítulo\(18\).
En Ecuación\ ref {15.45} supongamos que\(G\) es una coordenada fundamental, es decir,\(G \equiv q_k,\). Dado que no\(q_k\) es explícitamente dependiente del tiempo, entonces
\[\begin{align} \frac{dq_k}{ dt} &= \frac{\partial q_k}{ \partial t} + \{q_k, H\} \label{15.51} \\[4pt] &= 0+\sum_i \left(\frac{\partial q_k }{\partial q_i} \frac{\partial H }{\partial p_i} − \frac{\partial q_k}{ \partial p_i} \frac{\partial H }{\partial q_i }\right) \nonumber \\[4pt] &= \sum_i \left( \delta_{ik} \frac{\partial H}{ \partial p_i} − 0 \cdot \frac{\partial H}{ \partial q_i} \right) \nonumber \\[4pt] &= \frac{\partial H}{ \partial p_k} \label{15.52}\end{align}\]
Eso es
\[\dot{q}_k = \{q_k, H\} = \frac{\partial H}{ \partial p_k} \]
De igual manera considerar el impulso canónico fundamental\(G \equiv p_k\). Como no es explícitamente dependiente del tiempo, entonces
\[\begin{align} \frac{dp_k}{ dt} &= \frac{\partial p_k}{ \partial t} + \{p_k, H\} \label{15.54} \\[4pt] &= 0+\sum_i \left(\frac{\partial q_k }{\partial q_i} \frac{\partial H }{\partial p_i} − \frac{\partial q_k}{ \partial p_i} \frac{\partial H }{\partial q_i }\right) \nonumber \\[4pt] &= \sum_i \left( 0 \frac{\partial H}{ \partial p_i} − \delta_{ik} \cdot \frac{\partial H}{ \partial q_i} \right) \nonumber \\[4pt] &= \frac{\partial H}{ \partial q_k} \label{15.55}\end{align}\]
Eso es
\[\dot{p}_k = \{p_k, H\} = \frac{\partial H}{ \partial q_k} \]
Así, se ve que la forma de corchete de Poisson de las ecuaciones de movimiento incluye las ecuaciones de movimiento de Hamilton. Es decir,
\[\dot{q}_k = \{q_k, H\} = \frac{\partial H}{ \partial p_k} \label{15.57}\]
\[\dot{p}_k = \{p_k, H\} = −\frac{\partial H}{ \partial q_k} \label{15.58}\]
Lo anterior muestra que la estructura completa de las ecuaciones de movimiento de Hamilton se puede expresar directamente en términos de corchetes de Poisson.
La elegante formulación de los brackets de Poisson tiene la misma forma en todas las coordenadas canónicas que la formulación hamiltoniana. Sin embargo, las ecuaciones canónicas normales de Hamilton en la mecánica clásica asumen implícitamente que se puede especificar la posición exacta y el momento de una partícula simultáneamente en cualquier momento que sea aplicable solo a variables mecánicas clásicas que son funciones continuas de las coordenadas, y no a sistemas cuantificados. La característica importante de la representación del Bracket de Poisson de las ecuaciones de Hamilton es que generaliza las ecuaciones de Hamilton en una forma\ ref {15.57},\ ref {15.58} donde el corchete de Poisson es igualmente consistente con la mecánica clásica y cuántica, ya que permite variables canónicas que no se desplazan y Principio de incertidumbre de Heisenberg. Así, la generalización de las ecuaciones de Hamilton, mediante el uso de los corchetes de Poisson, proporciona una de las herramientas analíticas más poderosas aplicables tanto a la dinámica clásica como a la cuántica. Jugó un papel fundamental en la derivación de la teoría cuántica como se describe en el capítulo\(18\).
Ejemplo\(\PageIndex{3}\): Lorentz force in electromagnetism
Considerar una carga\(q\), y masa\(m\), en campos electromagnéticos constantes con potencial escalar\(\Phi\) y potencial vectorial\(A\). Capítulo\(6.10\) mostró que el lagrangiano para electromagnetismo puede escribirse como
\[L = \frac{1}{2} m\mathbf{\dot{x}} \cdot \mathbf{\dot{x}}−q(\boldsymbol{\Phi} − \mathbf{A} \cdot \mathbf{\dot{x}}) \nonumber\]
El impulso generalizado viene dado entonces por
\[\mathbf{p} = \frac{\partial L}{ \partial \mathbf{\dot{x}}} = m\mathbf{\dot{x}} + q\mathbf{A} \nonumber\]
Así el hamiltoniano puede escribirse como
\[H = (\mathbf{p} \cdot \mathbf{\dot{x}}) − L = \frac{(\mathbf{p}−q\mathbf{A})^2}{ 2m} + q\boldsymbol{\Phi} \nonumber\]
Las ecuaciones de movimiento de Hamilton dan
\[\mathbf{\dot{x}} = \{\mathbf{x}, H\} = \frac{(\mathbf{p}−q\mathbf{A})}{m} \nonumber\]
y
\[\mathbf{\dot{p}} = \{\mathbf{p},H\} = −q\boldsymbol{\nabla}\boldsymbol{\Phi} + \frac{q}{ m} {(\mathbf{p}−q\mathbf{A}) \times (\boldsymbol{\nabla} \times \mathbf{A})} \nonumber\]
Definir el campo magnético a ser
\[B \equiv \boldsymbol{\nabla} \times \mathbf{A} \nonumber\]
y el campo eléctrico a ser
\[\mathbf{E} = − \boldsymbol{\nabla}\boldsymbol{\Phi} − \frac{\partial \mathbf{A}}{ \partial t} \nonumber\]
entonces la fuerza Lorentz puede escribirse como
\[\mathbf{F} = \mathbf{\dot{p}} = q (\mathbf{E} + \mathbf{\dot{x}} \times \mathbf{B}) \nonumber\]
Ejemplo\(\PageIndex{4}\): Wavemotion
Supongamos que se trata de ondas viajeras de la forma\(\Psi = Ae^{i( \frac{1}{ m} xp_x−\omega t)}\) para un sistema conservador unidimensional de muchos osciladores lineales acoplados idénticos. Luego evaluando los siguientes corchetes de Poisson da
\[ \{p_x, H\} = 0 \nonumber\]
\[ \{x, H\} = 0 \nonumber\]
\[ \{\omega ,H\} = 0 \nonumber\]
\[ \{t, H\} = 0 \nonumber\]
Así\(p_x\),\(x\),\(\omega \), y\(t\) son constantes de movimiento. Sin embargo,
\[ \{p_x, x\} \neq 0 \nonumber\]
\[ \{\omega , t\} \neq 0 \nonumber\]
Así no se pueden medir simultáneamente las variables conjugadas\((p_xx)\) o\((\omega , t)\). Este es el Principio de Incertidumbre que se manifiesta por todas las formas de movimiento de las olas en la mecánica clásica y cuántica como se discute en el capítulo\(3.11\).
Ejemplo\(\PageIndex{5}\): Two-dimensional, anisotropic, linear oscillator
Considere una masa\(m\) ligada por un potencial anisotrópico, bidimensional, de oscilador lineal. Como se discutió en el capítulo\(11\), el movimiento puede describirse como que se encuentra completamente en el\(x − y\) plano que es perpendicular al momento angular\(J\). Es interesante derivar las ecuaciones de movimiento para este sistema utilizando la representación de corchetes de Poisson de la mecánica hamiltoniana.
La energía cinética viene dada por
\[T (\dot{x}, \dot{y}) = \frac{1}{ 2} m \left( \dot{x}^2 + \dot{y}^2\right) \nonumber\]
La unión lineal se reproduce asumiendo una energía potencial escalar cuadrática de la forma
\[U (x, y) = \frac{1}{ 2} k \left( x^2 + y^2\right) + \eta xy \nonumber\]
donde\(\eta\) está la fuerza anarmónica que acopló los modos del oscilador lineal isotrópico.
a) MODOS NORMALES
Como se discutió en el capítulo\(14\), se da una transformación a los modos normales del sistema mediante el uso de variables\((\alpha , \beta )\) donde\(\alpha \equiv \frac{1}{\sqrt{2}} (x + y)\) y\(\beta \equiv \frac{1}{\sqrt{2}} (x − y)\), es decir
\[x \equiv \frac{1}{\sqrt{2}} (\alpha + \beta ) \quad y \equiv \frac{1}{\sqrt{2}} (\alpha − \beta ) \nonumber\]
Expresar las energías cinéticas y potenciales en términos de las nuevas coordenadas da
\[T (\dot{x}, \dot{y}) = \frac{1}{ 4} m \left[\left( \dot{\alpha} + \dot{\beta} \right)^2 + \left( \dot{\alpha} − \dot{\beta} \right)^2 \right] = \frac{1}{ 2} m \left( \dot{\alpha}^2 + \dot{\beta}^2 \right) \nonumber\]
\[U = \frac{1}{ 4} k \left[ (\alpha + \beta )^2 + (\alpha − \beta )^2 \right] + \frac{1}{ 2} \eta \left( \alpha^2 − \beta^2\right) = \frac{1}{ 2} (k + \eta ) \alpha^2 + \frac{1}{ 2} (k − \eta ) \beta^2 \nonumber\]
Tenga en cuenta que la transformación de coordenadas hace que el lagrangiano sea separable, es decir
\[L = \frac{1}{2} m \left( \dot{\alpha}^2 + \dot{\beta}^2\right) − \frac{1}{2} (k + \eta ) \alpha^2 + \frac{1}{2} (k − \eta ) \beta^2 = L_{\alpha} + L_{\beta} \nonumber\]
donde
\[L_{\alpha} = \frac{1}{2} m\dot{\alpha}^2 − \frac{1}{2} (k + \eta ) \alpha^2 L_{\beta} = \frac{1}{2} m\dot{\beta}^2 − \frac{1}{2} (k − \eta ) \beta^2 \nonumber\]
Esto demuestra que la transformación ha separado el sistema en dos modos normales que son osciladores armónicos con frecuencias angulares
\[\omega_1 = \sqrt{\frac{k + \eta}{ m}} \quad \omega_2 = \sqrt{\frac{k − \eta}{ m}} \nonumber\]
Tenga en cuenta que el oscilador armónico no isotrópico se reduce al oscilador lineal isotrópico cuando\(\eta = 0\).
b) HAMILTONIAN
Los momentos canónicos son dados por
\[p_{\alpha} = \frac{\partial L} {\partial \dot{\alpha}} = m\dot{\alpha} \nonumber\]
\[p_{\beta} = \frac{\partial L}{ \partial \dot{\beta}} = m\dot{\beta} \nonumber\]
La definición de la hamiltoniana da
\[H = p_{\alpha} \dot{\alpha} + p_{\beta} \dot{\beta} − L = \frac{1}{ 2m } \left( p^2_{\alpha} + p^2_{\beta} \right) + \frac{1}{2} (k + \eta ) \alpha^2 + \frac{1}{2} (k − \eta ) \beta^2 \nonumber\]
Tenga en cuenta que esto puede ser factorizado como
\[H = H_{\alpha} + H_{\beta} \nonumber\]
donde
\[H_{\alpha} = \frac{1}{ 2m } p^2_{\alpha} + \frac{1}{2} (k + \eta ) \alpha^2 \quad H_{\beta} = \frac{1}{ 2m} p^2_{\beta} + \frac{1}{2} (k − \eta ) \beta^2 \nonumber\]
Usando la expresión Bracket de Poisson para la dependencia del tiempo, Ecuación\ ref {15.45}, y usando el hecho de que el hamiltoniano no es explícitamente dependiente del tiempo, es decir,\(\frac{\partial H}{ \partial t} = 0\), da
\[\begin{aligned} \frac{dH_{\alpha}}{ dt} = \frac{\partial H_{\alpha}}{ \partial t} + \{H_{\alpha} , H\} = 0+\{H_{\alpha} , H_{\alpha} + H_{\beta} \} = \{H_{\alpha} , H_{\beta} \} \\ = \frac{\partial H_{\alpha}}{ \partial \alpha} \frac{ \partial H_{\beta}}{ \partial p_{\alpha}} + \frac{\partial H_{\alpha}}{ \partial \beta} \frac{ \partial H_{\beta}}{ \partial p_{\beta}} − \frac{\partial H_{\alpha}}{ \partial p_{\alpha}} \frac{\partial H_{\beta}}{ \partial \alpha} − \frac{\partial H_{\alpha}} {\partial p_{\beta}} \frac{ \partial H_{\beta}}{ \partial \beta} = 0 \end{aligned}\]
De igual manera\(\frac{dH_{\beta} }{dt} = 0\). Esto implica que los hamiltonianos para ambos modos normales,\(H_{\alpha}\) y\(H_{\beta} \), son constantes de movimiento independientes del tiempo que son iguales a la energía total para cada modo.
c) Momento Angular
El momento angular para el movimiento en el\(\alpha \beta\) plano es perpendicular al\(\alpha \beta \) plano con una magnitud de
\[J = m (\alpha p_{\beta} − \beta p_{\alpha} ) \nonumber\]
La dependencia del tiempo del momento angular viene dada por
\[\begin{aligned} \frac{dJ}{ dt} = \frac{\partial J}{ \partial t} + \{J, H\} = 0+ \frac{\partial J}{ \partial \alpha}\frac{ \partial H }{\partial p_{\alpha}} − \frac{\partial J}{ \partial p_{\alpha}} \frac{\partial H}{ \partial \alpha} + \frac{\partial J}{ \partial \beta} \frac{ \partial H}{ \partial p_{\beta}} − \frac{\partial J }{\partial p_{\beta} }\frac{\partial H }{\partial \beta} \\ = p_{\beta} p_{\alpha} + mk\beta \alpha + m\eta \beta \alpha − p_{\alpha} p_{\beta} − mk\alpha \beta + m\eta \beta \alpha = 2m\eta \beta \alpha \end{aligned}\]
Obsérvese que si\(\eta = 0\), entonces las dos frecuencias propias, son degeneradas\(\omega_{\alpha} = \omega_{\beta}\), es decir, el sistema reduce al oscilador armónico isotrópico en el\(\alpha \beta\) plano que se discutió en el capítulo\(11.9\). Además,\(\frac{dJ}{ dt} = 0\) para\(\eta = 0\), es decir, el momento angular\(J\) en el\(\alpha \beta\) plano es una constante de movimiento cuando\(\eta = 0\).
d) TENSOR SIMETRIA
El tensor de simetría se definió en el capítulo\(11.9.3\) para ser
\[A^{\prime}_{ij} = \frac{p_ip_j}{ 2m } + \frac{1}{2} kx_ix_j \nonumber\]
donde\(i\) y\(j\) puede corresponder a cualquiera\(\alpha\) o\(\beta \). El tensor de simetría define la orientación del eje mayor de la órbita elíptica para el oscilador lineal bidimensional, isotrópico, como se describe en el capítulo\(11.9\).
Se ha demostrado que el oscilador isotrópico tiene dos modos normales que son degenerados, por lo tanto\(\alpha\) y\(\beta\) son modos normales igualmente buenos. El hamiltoniano demostró que, pues\(\eta = 0\), el hamiltoniano da que se conserva la energía total, así como las energías para cada uno de los dos modos normales que son.
\[E_{\alpha} = \frac{p^2_{\alpha}}{2m} + \frac{1}{2} k\alpha^2 \\ E_{\beta} = \frac{p^2_{\beta}}{ 2m} + \frac{1}{2} k\beta^2 \nonumber\]
Considerar el elemento de la matriz
\[A^{\prime}_{ij} = \frac{p_ip_j}{ 2m} + \frac{1}{2} kx_ix_j \nonumber\]
donde\(i, j\) cada uno puede representar\(\alpha\) o\(\beta \). Luego, para cada elemento de la matriz
\[\frac{dA^{\prime}_{ij}}{ dt } = \frac{\partial A^{\prime}_{ij}}{ \partial t} + \{A_{ij} , H\} = 0+ \frac{\partial A^{\prime}_{ij}}{ \partial \alpha} \frac{\partial H} {\partial p_{\alpha}} − \frac{\partial A^{\prime}_{ij}}{ \partial p_{\alpha}} \frac{\partial H }{\partial \alpha} + \frac{\partial A^{\prime}_{ij}}{ \partial \beta} \frac{\partial H }{\partial p_{\beta} } − \frac{\partial A^{\prime}_{ij}}{ \partial p_{\beta} } \frac{\partial H }{\partial \beta} = 0 \nonumber\]
Es decir, cada elemento de la matriz\(A^{\prime}_{12}\), conmuta con el hamiltoniano
\[ \{ A^{\prime}_{ij} , H\} = 0 \nonumber\]
Así, la representación de Poisson Brackets de la mecánica hamiltoniana se ha utilizado para demostrar que el tensor de simetría\(A^{\prime}_{ij} = \frac{p_ip_j}{ 2m} + \frac{1}{2} kx_ix_j\) es una constante de movimiento para el oscilador armónico isotrópico. Es decir, todos los elementos\(A^{\prime}_{\alpha \alpha}\)\(A^{\prime}_{ \beta \beta }\),, y\(A^{\prime}_{\alpha \beta}\) del tensor simétrico\(\mathbf{A}^{\prime}\) viajan con el hamiltoniano.
Tenga en cuenta que las tres constantes de movimiento,\(A^{\prime}\) y\(L\)\(H\), para el oscilador lineal isotrópico, bidimensional, forman un álgebra cerrada bajo el formalismo Bracket de Poisson.
Ejemplo\(\PageIndex{6}\): The eccentricity vector
El capítulo\(11.8.4\) mostró que el vector de excentricidad de Hamilton para la fuerza atractiva inversa de ley cuadrada,
\[\mathbf{A} \equiv (\mathbf{p} \times \mathbf{L})+(\mu k\hat{\mathbf{r}}) \nonumber\]
es una constante de movimiento que especifica el eje mayor de la órbita elíptica. El vector de excentricidad para la fuerza de ley cuadrada inversa se puede investigar usando Brackets de Poisson como se hizo para el tensor de simetría anterior. Se puede demostrar que
\[ \{L_i, A_j \} = \epsilon_{ijk}A_k \nonumber\]
\[ \{A_i, A_j \} = −2 \left(\frac{\mathbf{p}^2}{2\mu} + \frac{k}{ r} \right) \epsilon_{ijk}L_k \tag{a}\label{a}\]
Tenga en cuenta que el corchete en el lado derecho de la ecuación\ ref {a} es igual al hamiltoniano\(H\) para la fuerza de atracción de ley cuadrada inversa, y por lo tanto el corchete de Poisson es igual
\[ \{A_i, A_j \} = −2 \left(\frac{\mathbf{p}^2}{2\mu} + \frac{k}{ r} \right) \epsilon_{ijk}L_k = −2H\epsilon_{ijk}L_k \nonumber\]
Para el hamiltoniano\(H\) se puede demostrar que el soporte de Poisson
\[ \{H, \mathbf{A}\} = 0 \nonumber\]
Es decir, el vector de excentricidad conmuta con el hamiltoniano y así es una constante de movimiento. Anteriormente este resultado se obtuvo directamente utilizando las ecuaciones de movimiento dadas en la ecuación\(11.8.36\). Tenga en cuenta que las tres constantes de movimiento,\(L\),\(A\) y\(H\) forman un álgebra cerrada bajo el formalismo Bracket de Poisson similar a la tríada de constantes de movimiento\(L\),,\(A^{\prime}\) y\(H\) que ocurren para el oscilador lineal bidimensional, isotrópico descrito anteriormente. Ejemplos\(\PageIndex{5}\) e\(\PageIndex{6}\) ilustran que la representación de Poisson Brackets de la mecánica hamiltoniana es una poderosa sonda de la física subyacente, además de confirmar los resultados obtenidos directamente de las ecuaciones de movimiento como se describe en el capítulo\(11.8\) y\(11.9\).
Teorema de Liouville
El teorema de Liouvilles ilustra una aplicación de los Brackets de Poisson al espacio de fases hamiltoniano que tiene importantes implicaciones para la física estadística. La trayectoria de una sola partícula en el espacio de fase está completamente determinada por las ecuaciones de movimiento si se conocen las condiciones iniciales. Sin embargo, los sistemas de muchos cuerpos tienen tantos grados de libertad que se vuelve poco práctico resolver todas las ecuaciones de movimiento de los muchos cuerpos. Un ejemplo es un conjunto estadístico en un gas, un plasma o un haz de partículas. Por lo general, no es posible especificar el punto exacto en el espacio de fase para sistemas tan complicados. Sin embargo, es posible definir un conjunto de puntos en el espacio de fase que abarque todas las trayectorias posibles para el complicado sistema. Es decir, se puede especificar la distribución estadística de partículas en el espacio de fase.
Considera una densidad\(\rho\) de puntos representativos en el espacio de\((\mathbf{q}, \mathbf{p})\) fase. El número\(N\) de sistemas en el elemento volumen\(dv\) es
\[N = \rho dv \]
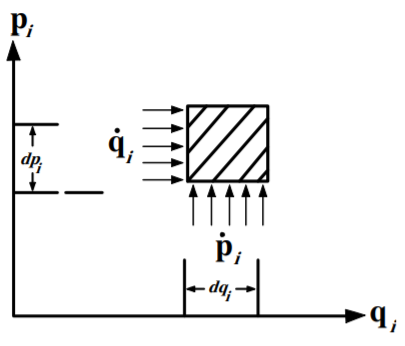
donde se asume que el elemento de volumen infinitossimal\(dv = dq_1, dq_2....dq_s,dp_1, dp_2....dp_s\) contiene muchos sistemas posibles por lo que se\(\rho\) puede considerar una distribución continua. Para las variables conjugadas\((q_i, p_i)\) mostradas en la Figura\(\PageIndex{1}\), el número de puntos representativos que se mueven a través del borde izquierdo hacia el área por unidad de tiempo es
\[\rho \dot{q}_i dp_i \]
El número de puntos representativos que fluyen fuera del área a lo largo del borde derecho es
\[\left[ \rho \dot{q}_i + \frac{\partial}{ \partial q_i} (\rho \dot{q}_i) dq_i \right] dp_i \]
De ahí que el aumento neto\(\rho\) en el elemento rectangular infinitossimal\(dq_idp_i\) debido al flujo en la dirección horizontal es
\[− \frac{\partial}{ \partial q_i} (\rho \dot{q}_i) dq_idp_i \]
Del mismo modo, la ganancia neta debida al flujo en la dirección vertical es
\[− \frac{\partial}{ \partial p_i} (\rho \dot{p}_i) dp_idq_i \]
Por lo tanto, el incremento total en el elemento\(dq_idp_i\) por unidad de tiempo es por lo tanto
\[− \left[ \frac{\partial}{ \partial q_i } (\rho \dot{q}_i) + \frac{\partial}{ \partial p_i} (\rho \dot{p}_i) \right] dp_idq_i \]
Supongamos que el número total de puntos debe conservarse, entonces el aumento total en el número de puntos dentro del elemento\(dq_idp_i\) debe ser igual a los cambios netos\(\rho\) en el elemento de superficie infinitossimal por unidad de tiempo. Eso es
\[\left(\frac{\partial \rho}{ \partial t} \right) dq_idp_i \]
Sumando así sobre todos los valores posibles de\(i\) da
\[\frac{\partial \rho }{\partial t} + \sum_i \left[ \frac{\partial}{ \partial q_i} (\rho \dot{q}_i) + \frac{\partial}{ \partial p_i} (\rho \dot{p}_i) \right] = 0 \]
o
\[\frac{\partial \rho}{ \partial t} +\sum_i \left[ \dot{q}_i \frac{\partial \rho}{ \partial q_i } + \dot{p}_i \frac{\partial \rho}{ \partial p_i} \right] + \rho \sum_i \left[ \frac{\partial \dot{p}_i}{ \partial p_i} + \frac{\partial \dot{q}_i}{ \partial q_i } \right] = 0 \]
Insertar las ecuaciones canónicas de Hamilton en ambos paréntesis y diferenciar el último paréntesis da como resultado
\[\frac{\partial \rho}{ \partial t} +\sum_i \left[ \frac{\partial H}{ \partial p_i} \frac{\partial \rho }{\partial q_i} − \frac{\partial H}{ \partial q_i} \frac{\partial \rho}{ \partial p_i } \right] + \rho \sum_i \left[\frac{ \partial^2 H}{ \partial p_i\partial q_i} − \frac{\partial^2H}{ \partial p_i\partial q_i} \right] = 0 \]
Los dos términos en el último paréntesis cancelan y así
\[\frac{\partial \rho }{\partial t} +\sum_i \left[ \frac{\partial H }{\partial p_i} \frac{\partial \rho} { \partial q_i} − \frac{\partial H}{ \partial q_i} \frac{\partial \rho}{ \partial p_i} \right] = \frac{\partial \rho}{ \partial t} + \{\rho , H\} = 0 \]
Sin embargo, esto solo equivale\(\frac{d\rho}{ dt}\), por lo tanto
\[\frac{d\rho }{dt} = \frac{\partial \rho}{ \partial t} + \{\rho , H\} = 0 \label{15.70}\]
Esto se llama teorema de Liouville que establece que la tasa de cambio de densidad de puntos representativos se desvanece, es decir, la densidad de puntos es una constante en el espacio de fase hamiltoniano a lo largo de una trayectoria específica. El teorema de Liouville significa que el sistema actúa como un fluido incompresible que se mueve para ocupar un volumen igual en el espacio de fase a cada instante, aunque la forma del volumen del espacio de fase pueda cambiar, es decir, la densidad fase-espacio del fluido permanece constante. La ecuación\ ref {15.70} es otra ilustración de la relación básica de corchetes de Poisson\ ref {15.45} y la utilidad de los corchetes de Poisson en física.
El teorema de Liouville es de crucial importancia para la mecánica estadística de conjuntos donde se desconoce el conocimiento exacto del sistema, solo se conocen los promedios estadísticos. Un ejemplo es el enfoque de haces de partículas cargadas mediante sistemas de manejo de haces. En un foco de la viga, la anchura transversal in\(x\) se minimiza, mientras que la anchura adentro\(p_x\) es mayor ya que la viga está convergiendo al foco, mientras que una viga paralela tiene la anchura máxima\(x\) y la anchura mínima de extensión\(p_x\). Sin embargo, el producto\(xp_x\) permanece constante en todo el sistema de enfoque. Para un haz bidimensional, esto se aplica igualmente para las\(p_y\) coordenadas\(y\) y, etc. Es obvio que la calidad final del haz para cualquier sistema de transporte de haz está limitada en última instancia por la emitancia de la fuente del haz, es decir, el área inicial de la distribución del espacio de fase. Tenga en cuenta que el teorema de Liouville solo se aplica al espacio de\(q_i − p_i\) fases hamiltoniano, no al espacio estatal\(x − \dot{x}\) lagrangiano. Como consecuencia, la dinámica hamiltoniana, más que la dinámica de Lagrange, se utiliza para discutir conjuntos en física estadística.
Tenga en cuenta que el teorema de Liouville es aplicable solo para sistemas conservadores, es decir, donde se aplican las ecuaciones de movimiento de Hamilton. Para los sistemas disipativos, el volumen del espacio de fase se contrae con el tiempo en lugar de ser una constante del movimiento.