
15.4: Teoría Hamilton-Jacobi
- Page ID
- 126974
Hamilton utilizó el Principio de Acción Menor para derivar la relación Hamilton-Jacobi (capítulo\(15.3\))
\[H(\mathbf{q},\mathbf{p}, t) + \frac{\partial S}{\partial t} = 0 \label{15.11}\]
donde\(\mathbf{q}, \mathbf{p}\) se refieren a las\(1 \leq i \leq n\) variables\(q_i, p_i\) y\(S(q_j (t_1), t_1, q_j (t_2), t_2)\) es la acción funcional. La integración de esta ecuación diferencial parcial de primer orden no es trivial, lo que constituye una desventaja importante para la explotación práctica de la ecuación de Hamilton-Jacobi. Esto estimuló a Jacobi a desarrollar el marco matemático para la transformación canónica que se requieren para resolver la ecuación Hamilton-Jacobi. El enfoque de Jacobi es explotar funciones generadoras para hacer una transformación canónica a un nuevo hamiltoniano\(\mathcal{H}(\mathbf{Q}, \mathbf{P}, t)\) que equivale a cero.
\[\mathcal{H}(\mathbf{Q},\mathbf{P}, t) = H(\mathbf{q},\mathbf{p}, t) + \frac{\partial S}{\partial t} = 0 \label{15.90}\]
La función generadora para resolver la ecuación de Hamilton-Jacobi es entonces igual a la función de acción\(S\).
La teoría Hamilton-Jacobi se basa en seleccionar una transformación canónica a nuevas coordenadas\((Q, P, t)\) todas las cuales son constantes o cíclicas, lo que implica que los momentos correspondientes\(P_i\) son constantes.\(Q_i\) En cualquier caso, se obtiene una solución a las ecuaciones de movimiento. Una característica notable de la teoría Hamilton-Jacobi es que la transformación canónica se caracteriza completamente por una sola función generadora,\(S\). Las ecuaciones canónicas también se caracterizan por una sola función hamiltoniana,\(H\). Además, la función generadora\(S\), y la función hamiltoniana\(H\), están unidas entre sí por la ecuación\ ref {15.11}. El objetivo subyacente de la teoría Hamilton-Jacobi es transformar lo hamiltoniano a una forma conocida de tal manera que las ecuaciones canónicas se vuelvan directamente integrables. Dado que esta transformación depende de una sola función escalar, el problema se reduce a resolver una única ecuación diferencial parcial.
Hamiltoniano dependiente del tiempo
Integral completa de Jacobi\(S(q_i, P_i, t)\)
El principio que subyace al enfoque de Jacobi a la teoría Hamilton-Jacobi es proporcionar una receta para encontrar la función generadora\(F = S\) necesaria para transformar el hamiltoniano\(H(\mathbf{q}, \mathbf{p}, t)\) en el nuevo hamiltoniano\(\mathcal{H}(\mathbf{Q}, \mathbf{P}, t)\) usando la ecuación\ ref {15.90}. Cuando las derivadas del hamiltoniano transformado\(\mathcal{H}(\mathbf{Q}, \mathbf{P}, t)\) son cero, entonces las ecuaciones del movimiento se vuelven
\[\dot{Q}_i = \frac{\partial \mathcal{H}}{ \partial P_i} = 0 \label{15.91}\]
\[\dot{P}_i = − \frac{\partial \mathcal{H}}{ \partial Q_i } = 0 \label{15.92}\]
y así\(Q_i\) y\(P_i\) son constantes de movimiento. El nuevo hamiltoniano\(\mathcal{H}\) debe estar relacionado con el hamiltoniano original\(H\) por una transformación canónica para la cual
\[\mathcal{H}(\mathbf{Q}, \mathbf{P}, t) = H(\mathbf{q}, \mathbf{p}, t) + \frac{\partial S}{ \partial t} \label{15.93}\]
Las ecuaciones\ ref {15.91} y\ ref {15.92} se satisfacen automáticamente si la nueva hamiltoniana\(\mathcal{H} = 0\) desde entonces Ecuación\ ref {15.93} da que la función generadora\(S\) satisface la Ecuación\ ref {15.90}.
Se puede utilizar cualquiera de los cuatro tipos de función generadora. Jacobi eligió la función generadora tipo 2 como la más útil para muchos casos prácticos, es decir,\(S(q_i, P_i, t)\) que se llama integral completa de Jacobi.
Para generar funciones\(F_1\) y\(F_2\) los momentos generalizados se derivan de la acción por la derivada
\[p_i = \frac{\partial S}{ \partial q_i} \label{15.4}\]
Utilizar este impulso generalizado para reemplazar\(p_i\) en el hamiltoniano\(H\), dado en la Ecuación\ ref {15.93}, conduce a la ecuación Hamilton-Jacobi expresada en términos de la acción\(S\).
\[H(q_1, ...q_n; \frac{\partial S}{ \partial q_1 }, ..., \frac{\partial S}{ \partial q_n} ;t) + \frac{\partial S}{ \partial t} = 0 \label{15.94}\]
La ecuación de Hamilton-Jacobi,\ ref {15.94}, se puede escribir de manera más compacta usando tensores\(\mathbf{q}\) y\(\boldsymbol{\nabla}S\) para designar\((q_1, ..q_n)\) y\(\frac{\partial S}{ \partial q_1 }, ..., \frac{\partial S}{ \partial q_n}\) respectivamente. Eso es
\[H(\mathbf{q}, \boldsymbol{\nabla}S, t) + \frac{\partial S}{\partial t} = 0 \label{15.95}\]
La ecuación\ ref {15.95} es una ecuación diferencial parcial de primer orden en\(n + 1\) variables que son las antiguas coordenadas espaciales\(q_i\) más el tiempo\(t\). No se\(P_i\) han especificado los nuevos momenta salvo que son constantes desde entonces\(\mathcal{H} = 0\).
Asumir la existencia de una solución de\ ref {15.95} de la forma\(S(q_i, P_i, t) = S(q_1, ..q_n; \alpha_1, ..\alpha_{n+1};t)\) donde los momenta generalizados\(P_i = \alpha_1, \alpha_2, ....\alpha\) más\(t\) son las constantes\(n + 1\) independientes de integración en el marco transformado. Una constante de integración es irrelevante para la solución ya que solo se involucran derivados parciales de\(S(q_i, P_i, t)\) con respecto a\(q_i\) y\(t\) están involucrados. Así, si\(S\) es una solución de la ecuación diferencial parcial de primer orden, entonces así es\(S + \alpha\) donde\(\alpha\) está una constante. Por lo tanto, se puede suponer que una de las\(n + 1\) constantes de integración es solo una constante aditiva que puede ignorarse conduciendo efectivamente a una solución
\[S(q_i, P_i, t) = S(q_1, .....q_n;\alpha_1, .....\alpha_n;t) \label{15.96}\]
donde ninguna de las constantes\(n\) independientes es únicamente aditiva. Dichas soluciones de función generadora se denominan soluciones completas de las ecuaciones diferenciales parciales de primer orden ya que se conocen todas las constantes de integración.
Es posible suponer que los momentos\(n\) generalizados,\(P_i\) son constantes\(\alpha_i\), donde las\(\alpha_i\) son las constantes. Esto permite que el impulso generalizado se escriba como
\[p_i = \frac{\partial S(\mathbf{q}, \boldsymbol{\alpha}, t)}{ \partial q_i } \label{15.97}\]
Del mismo modo, las ecuaciones de movimiento de Hamilton dan la coordenada conjugada\(\mathbf{Q} = \boldsymbol{\beta}\), donde\(\beta_i\) son constantes. Eso es
\[Q_i = \beta_i = \frac{\partial S(\mathbf{q}, \boldsymbol{\alpha}, t)}{ \partial \alpha_i} \label{15.98}\]
El procedimiento anterior ha determinado el conjunto completo de\(2n\) constantes\((\mathbf{Q} = \boldsymbol{\beta}, \mathbf{P} = \boldsymbol{\alpha})\). Es posible invertir la transformación canónica para expresar la solución anterior, la cual se expresa en términos de\(Q_i = \beta_i\) y\(P_i = \alpha_i\), volviendo a las coordenadas originales, es decir,\(q_j = q_j (\alpha , \beta , t)\) y momenta\(p_j = p_j (\alpha , \beta , t)\) que es la solución requerida.
Función principal de Hamilton\(S_H(\mathbf{q}_i, t; \mathbf{q}_o t_o)\)
El enfoque de Hamilton para resolver la ecuación de Hamilton-Jacobi\ ref {15.95} es buscar una transformación canónica de variables\((\mathbf{p}, \mathbf{q})\) en el tiempo\(t\), a un nuevo conjunto de cantidades constantes, que pueden ser los valores iniciales en el\((\mathbf{q}_0, \mathbf{p}_0)\) momento\(t = 0\). La función principal de Hamilton\(S_H(q_i, t; q_ot_o)\) es la función generadora para esta transformación canónica de las variables\((\mathbf{q}, \mathbf{p})\) en el tiempo t a las variables iniciales\((\mathbf{q}_0, \mathbf{p}_0)\) en el tiempo\(t_0\). La función principal de Hamilton\(S_H(q_i, t; q_ot_o)\) está directamente relacionada con la integral completa de Jacobi\(S(q_i, P_i, t)\).
Obsérvese que\(S_H\) es la función generadora de una transformación canónica desde las\((\mathbf{q}, \mathbf{p}, t)\) variables actuales hasta las iniciales\((\mathbf{q}_0, \mathbf{p}_0, t_0)\), mientras que Jacobi\(S\) es la función generadora de una transformación canónica de las\((\mathbf{q},\mathbf{p}, t)\) variables presentes a las variables constantes\((\mathbf{Q} = \boldsymbol{\beta}, \mathbf{P} = \boldsymbol{\alpha})\). Para el enfoque de Hamilton, la transformación canónica se puede lograr en dos pasos usando\(S\) primero transformando de\((\mathbf{q}, \mathbf{p}, t)\) a tiempo\(t\), a\((\boldsymbol{\beta}, \boldsymbol{\alpha})\), luego transformando de\((\boldsymbol{\beta}, \boldsymbol{\alpha})\) a\((\mathbf{q}_0,\mathbf{p}_0, t_0)\). Es decir, este proceso de dos pasos corresponde a
\[S_H(\mathbf{q}, t; \mathbf{q}_ot_o) = S(\mathbf{q}, \boldsymbol{\alpha}, t) − S(\mathbf{q}_0, \boldsymbol{\alpha}, t_0) \label{15.99}\]
La función principal de Hamilton\(S_H(\mathbf{q}, t; \mathbf{q}_ot_o)\) está relacionada con la integral completa de Jacobi\(S(\mathbf{q}, \boldsymbol{\alpha}, t)\), y no se discutirá más en este libro.
Hamiltoniano independiente del tiempo
Frecuentemente el hamiltoniano no depende explícitamente del tiempo. Para el estándar lagrangiano con restricciones independientes del tiempo y transformación, entonces\(H (\mathbf{q}, \mathbf{p},t) = E\) que es la energía total. Para este caso, la ecuación de Hamilton-Jacobi simplifica para dar
\[\frac{\partial S}{ \partial t} = −H( \mathbf{ q}, \mathbf{ p}, t) = −E (\boldsymbol{\alpha}) \label{15.100}\]
La integración de la dependencia del tiempo es trivial y, por lo tanto, la acción integral para un hamiltoniano independiente del tiempo
\[S(\mathbf{q}, \boldsymbol{\alpha},t) = W (\mathbf{q}, \boldsymbol{\alpha}) − E (\boldsymbol{\alpha})t \label{15.101}\]
Es decir, la integral de acción se ha separado en un término independiente del tiempo\(W (\mathbf{q}, \boldsymbol{\alpha})\) que se llama función característica de Hamilton más un término dependiente del tiempo\(−E (\boldsymbol{\alpha})t\). Así usando ecuaciones\ ref {15.97},\ ref {15.101} da que el impulso generalizado es
\[p_i = \frac{\partial W(\mathbf{q}, \boldsymbol{\alpha})}{ \partial q_i} \label{15.102}\]
El significado físico de la función característica de Hamilton se\(W (\mathbf{q}, \boldsymbol{\alpha})\) puede entender tomando la derivada del tiempo total
\[\frac{dW}{ dt} = \sum_i \frac{\partial W(\mathbf{q}, \boldsymbol{\alpha})}{ \partial q_i} \dot{q}_i = \sum_i p_i\dot{q}_i \nonumber\]
Tomando el tiempo integral luego da
\[W (\mathbf{q}, \boldsymbol{\alpha}) = \int \sum p_i\dot{q}_i dt =\int \sum p_idq_i \label{15.103}\]
Tenga en cuenta que esto equivale a la acción abreviada descrita en el capítulo\(9.2.3\), es decir\(W(\mathbf{q}, \boldsymbol{\alpha}) = S_0(\mathbf{q}, \boldsymbol{\alpha})\).
Insertar la acción\(S (\mathbf{q}, \boldsymbol{\alpha})\) en la ecuación de Hamilton-Jacobi\((15.2.1)\) da
\[H(\mathbf{q}; \frac{\partial W(\mathbf{q}, \boldsymbol{\alpha})}{ \partial \mathbf{q}} ) = E (\boldsymbol{\alpha}) \label{15.104}\]
A esto se le llama la ecuación Hamilton-Jacobi independiente del tiempo. Por lo general es conveniente tener\(E\) igual la energía total. No obstante, a veces es más conveniente excluir la\(k^{th}\) energía\(E(\alpha_k)\) en el set, en cuyo caso\(E = E(\alpha_1, \alpha_2, ...\alpha_k−1)\); el rutiano explota esta característica.
Las ecuaciones de la transformación canónica expresadas en términos de\(W (\mathbf{q}, \boldsymbol{\alpha})\) son
\[p_i = \frac{\partial W(\mathbf{q}, \boldsymbol{\alpha}) }{\partial q_i } \quad \beta_i + \frac{\partial E(\boldsymbol{\alpha}) }{\partial \alpha_i} t = \frac{\partial W(\mathbf{q}, \boldsymbol{\alpha})}{ \partial \alpha_i} \label{15.105}\]
Estas ecuaciones muestran que la función característica de Hamilton\(W (\mathbf{q}, \boldsymbol{\alpha})\) es en sí misma la función generadora de una transformación canónica independiente del tiempo de las variables antiguas\((q, p)\) a un conjunto de nuevas variables
\[Q_i = \beta_i + \frac{\partial E(\boldsymbol{\alpha})}{ \partial \alpha_i } t \quad P_i = \alpha_i \label{15.106}\]
La tabla\(\PageIndex{1}\) resume las formas dependientes del tiempo e independientes del tiempo de la ecuación de Hamilton-Jacobi.
| Hamiltoniano | Dependiente del tiempo\(H(q, p, t)\) | Independiente del tiempo\(H(q, p)\) |
| Hamiltoniano transformado | \(\mathcal{H}= 0\) | \(\mathcal{H}\)es cíclico |
| Variables canónicas transformadas | Todos\(Q_iP_i\) son constantes de movimiento | Todos\(P_i\) son constantes de movimiento |
| Ecuaciones transformadas de movimiento |
\(\dot{Q}_i = \frac{\partial \mathcal{H}}{ \partial P_i} = 0\), por lo tanto\(Q_i = \beta_i\) \(\dot{P}_i = − \frac{\partial \mathcal{H}}{ \partial Q_i} = 0\), por lo tanto\(P_i = \alpha_i\) |
\(\dot{Q}_i = \frac{\partial \mathcal{H}}{ \partial P_i} = v_i\), por lo tanto\(Q_i = v_i t + \beta_i\) \(\dot{P}_i = − \frac{\partial \mathcal{H}} {\partial Q_i} = 0\), por lo tanto\(P_i = \alpha_i\) |
| Función generadora | Integral completa de Jacobi\(S(\mathbf{q}, \mathbf{P}, t)\) | Función característica\(W(\mathbf{q}, \mathbf{P})\) |
| Ecuación de Hamilton-Jacobi | \(H(q_1, ...q_n; \frac{\partial S}{ \partial q_1 }, ..., \frac{\partial S} {\partial q_n} ;t)+\frac{\partial S}{ \partial t} = 0\) | \(H(q_1, ...q_n; \frac{\partial W }{\partial q_1} , ..., \frac{\partial W}{ \partial q_n} ) = E\) |
| Ecuaciones de transformación |
\(p_i= \frac{\partial S}{ \partial q_i}\) \(Q_i= \frac{\partial S}{ \partial \alpha_i} = \beta_i\) |
\(p_i=\frac{\partial W}{ \partial q_i}\) \(Q_i=\frac{\partial W}{ \partial \alpha_i} = v_i t + \beta_i\) |
Separación de variables
La explotación de la teoría Hamilton-Jacobi requiere encontrar una función de acción adecuada\(S\). Cuando el hamiltoniano es independiente del tiempo, entonces la Ecuación\ ref {15.101} muestra que la dependencia temporal de la integral de acción se separa de la dependencia de las variables espaciales. Para muchos sistemas, la función característica de Hamilton se\(W(\mathbf{q}, \mathbf{P})\) separa en una simple suma de términos cada uno de los cuales es función de una sola variable. Es decir,
\[W(\mathbf{q}, \boldsymbol{\alpha}) = W_1(q_1) + W_2(q_2) + \cdots \cdot \cdot W_n(q_n) \label{15.107}\]
donde cada función en la suma de la derecha depende únicamente de una sola variable. Entonces la Ecuación\ ref {15.100} se reduce a
\[H(q_1, ...q_n; \frac{\partial W }{\partial q_1} , ...,\frac{ \partial W}{ \partial q_n} ) = E \label{15.108}\]
donde\(E\) está la constante que denota la energía total.
La función característica de Hamilton se\(W( \mathbf{ q}, \mathbf{ P})\) puede utilizar con ecuaciones\ ref {15.101},\ ref {15.102},\ ref {15.91},\ ref {15.92}, y\ ref {15.93} para derivar
\[p_i = \frac{\partial W( \mathbf{ q}, \boldsymbol{\alpha}) }{\partial q_i} \quad Q_i = \frac{\partial W( \mathbf{ q}, \boldsymbol{\alpha}) }{\partial P_i} \label{15.109}\]
\[\dot{Q}_i = \frac{\partial \mathcal{H}}{ \partial P_i} = 0 \quad \dot{P}_i = \frac{\partial \mathcal{H}}{ \partial Q_i} = 0 \label{15.110}\]
\[\mathcal{H} = H + \frac{\partial S}{\partial t} = H − E = 0 \label{15.111}\]
lo que ha reducido el problema a una simple suma de ecuaciones diferenciales unidimensionales de primer orden.
Si la\(i^{th}\) variable es cíclica, entonces el hamiltoniano no es una función de\(q_i\) y el\(i^{th}\) término en la función característica de Hamilton es igual\(W_i = \alpha_iq_i\) que se separa de la suma en la Ecuación\ ref {15.107}. Es decir, todas las variables cíclicas pueden ser factorizadas a partir de\(W( \mathbf{ q}, \boldsymbol{\alpha})\) lo cual simplifica enormemente la solución de la ecuación Hamilton-Jacobi. Como consecuencia, la capacidad del método Hamilton-Jacobi para realizar una transformación canónica para separar el sistema en muchas variables cíclicas o independientes, que pueden resolverse trivialmente, es una forma notablemente poderosa para resolver las ecuaciones de movimiento en la mecánica hamiltoniana.
Ejemplo\(\PageIndex{1}\): Free particle
Considere el movimiento de una partícula libre de masa\(m\) en una región libre de fuerza. Entonces la Ecuación\ ref {15.93} se reduce a
\[H(q_1, ...q_n; \frac{\partial S}{ \partial q_1} , ..., \frac{\partial S}{ \partial q_n} ;t) + \frac{\partial S}{\partial t} = 0 \nonumber\]
Dado que no actúan fuerzas, y el impulso\(\mathbf{p} = \boldsymbol{\nabla}S\), así la ecuación de Hamilton-Jacobi se reduce a
\[\frac{1}{ 2m } \nabla^2S + \frac{\partial S}{\partial t} = 0 \tag{A}\label{A}\]
El hamiltoniano es independiente del tiempo, así se aplica la Ecuación\ ref {15.101}
\[S(\mathbf{q}, t) = W(\mathbf{q}, \boldsymbol{\alpha}) − E(\boldsymbol{\alpha})t \nonumber\]
Dado que el hamiltoniano no depende explícitamente de las coordenadas\((x, y, z)\), entonces las coordenadas son cíclicas y la separación de las variables,\ ref {15.107}, da que la acción
\[S = \boldsymbol{\alpha} \cdot \mathbf{ r} − Et \tag{B}\label{B}\]
Para que la Ecuación\ ref {B} sea una solución de la Ecuación\ ref {A} requiere que
\[E = \frac{1}{ 2m} \boldsymbol{\alpha}^2 \tag{C}\label{C}\]
Por lo tanto
\[S = \boldsymbol{\alpha} \cdot \mathbf{r} − \frac{1}{ 2m} \boldsymbol{\alpha}^2t \tag{D}\label{D}\]
Desde
\[\mathbf{\dot{Q}} = \frac{\partial S }{\partial \boldsymbol{\alpha} } = \mathbf{r}− \frac{\boldsymbol{\alpha}}{ m }t \nonumber\]
la ecuación de movimiento y el momento conjugado están dadas por
\[\mathbf{r} = \mathbf{\dot{Q}} + \frac{\boldsymbol{\alpha}}{ m} t \quad \mathbf{p} = \boldsymbol{\nabla}S = \boldsymbol{\alpha} \nonumber\]
Así, la relación Hamilton-Jacobi ha dado tanto la ecuación de movimiento como el impulso lineal\(\mathbf{p}\).
Ejemplo\(\PageIndex{2}\): Point particle in a uniform gravitational field
El hamiltoniano es
\[H = \frac{1}{ 2m} (p^2_x + p^2_y + p^2_z) + mgz \nonumber\]
Como el sistema es conservador, entonces la ecuación de Hamilton-Jacobi se puede escribir en términos de la función característica de Hamilton\(W\)
\[E = \frac{1}{ 2m} \left[\left(\frac{\partial W}{ \partial x} \right)^2 + \left(\frac{\partial W}{ \partial y} \right)^2 + \left(\frac{\partial W}{ \partial z} \right)^2 \right] + mgz \nonumber\]
Suponiendo que las variables se pueden separar\(W = X(x) + Y (y) + Z(z)\) lleva a
\[p_x = \frac{\partial X(x)}{ \partial x} = \alpha_x \nonumber\]
\[p_y = \frac{\partial Y (y)}{ \partial y} = \alpha_y \nonumber\]
\[p_z = \frac{\partial Z(z) }{\partial z} = \sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y} \nonumber\]
Así, por integración el total\(W\) es igual a
\[W = \int^x_{x_0} \alpha_x dx + \int^y_{y_0} \alpha_ydy + \int^z_{z_0} \left(\sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y }\right) dz \nonumber\]
Por lo tanto, usando\ ref {15.106} da
\[\beta_z = t − t_0 = \int^z_{z_0} \frac{mdz}{ \sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y } } \nonumber\]
\[\beta_x = \text{ constant }= (x − x_0) − \int^z_{z_0} \frac{\alpha_xdz}{ \sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y } } \nonumber\]
\[\beta_y = \text{ constant } = (y − y_0) − \int^z_{z_0} \frac{\alpha_ydz }{\sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y }} \nonumber\]
Si\(x_0, y_0, z_0\) es la posición de la partícula en el tiempo\(t = t_0\) entonces\(\beta_x = \beta_y = 0\), y desde\ ref {15.106}
\[x − x_0 = \left(\frac{\alpha_x}{ m }\right) (t − t_0) \nonumber\]
\[y − y_0 = \left(\frac{\alpha_y}{ m} \right) (t − t_0) \nonumber\]
\[z − z_0 = \left( \frac{\sqrt{ 2m(E − mgz) − \alpha^2_x − \alpha^2_y }}{ m} \right) (t − t_0) − \frac{1}{ 2} g(t − t_0)^2 \nonumber\]
Esto corresponde a una parábola como debería esperarse para este ejemplo trivial.
Ejemplo\(\PageIndex{3}\): One-dimensional harmonic oscillator
Como se discutió en\(15.3.5\) el ejemplo, el hamiltoniano para el oscilador armónico unidimensional puede escribirse como
\[H = \frac{1}{ 2m} ( p^2 + m^2\omega^2q^2) = E \nonumber\]
asumiendo que es conservadora y dónde\(\omega = \sqrt{\frac{k}{m}}\).
La función característica de Hamilton se\(W\) puede utilizar donde
\[S (q, E, t) = W (q, E) − Et \nonumber\]
\[p_i = \frac{\partial W}{ \partial q_i} \nonumber\]
Insertando el impulso generalizado\(p_i\) en el hamiltoniano da
\[\frac{1}{ 2m} \left(\left[ \frac{\partial W }{\partial q} \right]^2 + m^2\omega^2q^2 \right) = E \nonumber\]
La integración de esta ecuación da
\[W = \sqrt{ 2mE} \int dq \sqrt{1 − \frac{m\omega^2q^2}{ 2E}} \nonumber\]
Eso es
\[S = \sqrt{ 2mE } \int dq \sqrt{ 1 − \frac{m\omega^2q^2}{ 2E}} − Et \nonumber\]
Tenga en cuenta que
\[\frac{\partial S(q, E, t)}{ \partial E} = \sqrt{\frac{2m }{E}} \int \frac{dq}{\sqrt{1 - \frac{ m\omega^2q^2}{ 2E}}} − t \nonumber\]
Esto se puede integrar para dar
\[t = \frac{1}{ \omega }\arcsin \left( q \sqrt{\frac{m\omega^2}{ 2E}}\right) + t_0 \nonumber\]
Eso es
\[q = \sqrt{\frac{2E}{m\omega^2}} \sin \omega (t − t_0) \nonumber\]
Esta es la solución familiar del oscilador armónico no amortiguado.
Ejemplo\(\PageIndex{4}\): The central force problem
El problema de una partícula sobre la que actúa una fuerza central ocurre frecuentemente en la física. Considere la masa sobre la que\(m\) actúa una energía potencial central independiente del tiempo\(U(r)\). El hamiltoniano es independiente del tiempo y puede escribirse en coordenadas esféricas como
\[H = \frac{1}{ 2m} \left( p^2_r + \frac{1}{r^2} p^2_{\theta} + \frac{1}{r^2 \sin^2 \theta} p^2_{\psi} \right) + U(r) = E \nonumber\]
La ecuación de Hamilton-Jacobi independiente del tiempo es conservadora, por lo tanto
\[\frac{1}{ 2m} \left[\left(\frac{\partial W}{ \partial r }\right)^2 + \frac{1}{ r^2} \left(\frac{\partial W }{\partial \theta} \right)^2 + \frac{1}{ r^2 \sin^2 \theta} \left(\frac{\partial W}{ \partial \phi} \right)^2 \right] + U(r) = E \nonumber\]
Pruebe una solución separable para la función característica de Hamilton\(W\) de la forma
\[W = R(r) + \Theta (\theta ) + \Phi (\phi ) \nonumber\]
La ecuación de Hamilton-Jacobi se convierte entonces
\[\frac{1}{ 2m} \left[\left(\frac{\partial R} {\partial r} \right)^2 + \frac{1}{ r^2} \left(\frac{\partial \Theta}{ \partial \theta} \right)^2 + \frac{1}{ r^2 \sin^2 \theta} \left(\frac{\partial \Phi}{ \partial \phi } \right)^2 \right] + U(r) = E \nonumber\]
Esto se puede reorganizar en la forma
\[2mr^2 \sin^2 \theta \left\{ \frac{1}{ 2m} \left[\left(\frac{\partial R}{ \partial r} \right)^2 + \frac{1} {r^2} \left(\frac{\partial \Theta}{ \partial \theta} \right)^2 \right] + U(r) + E \right\} = − \left(\frac{\partial \Phi}{ \partial \phi} \right)^2 \nonumber\]
El lado izquierdo es independiente de\(\phi\) mientras que el lado derecho es independiente de\(r\) y\(\theta\). Ambos lados deben ser iguales a una constante que se establece en igual\(−L^2_z\), es decir
\[\frac{1}{2m} \left[\left(\frac{\partial R}{ \partial r} \right)^2 + \frac{1}{ r^2} \left(\frac{\partial \Theta}{ \partial \theta} \right)^2 \right] + U(r) + \frac{L^2_z }{2mr^2 \sin^2 \theta} = E \nonumber\]
\[\left(\frac{\partial \Phi}{ \partial \phi} \right)^2 = L^2_z \nonumber\]
La ecuación en\(r\) y se\(\theta\) puede reorganizar en la forma
\[2mr^2 \left[ \frac{1}{2m} \left(\frac{\partial R}{ \partial r} \right)^2 + U(r) − E \right] = − \left[\left(\frac{\partial \Theta}{ \partial \theta} \right)^2 + \frac{L^2_z}{ \sin^2 \theta} \right] \nonumber\]
El lado izquierdo es independiente\(\theta\) y el lado derecho es independiente de,\(r\) por lo que ambos deben ser iguales a una constante que se establece para ser\(−L^2\)
\[\frac{1}{2m} \left(\frac{\partial R}{ \partial r} \right)^2 + U(r) + \frac{L^2}{ 2mr^2} = E \nonumber\]
\[\left(\frac{\partial \Theta}{ \partial \theta} \right)^2 + \frac{L^2_z}{ \sin^2 \theta} = L^2 \nonumber\]
Las variables ahora están completamente separadas y, por reordenamiento más integración, se obtiene
\[R(r) = \sqrt{2m} \int \sqrt{ E − U(r) − \frac{L^2 }{2mr^2}} dr \nonumber\]
\[\Theta (\theta ) = \int \sqrt{ L^2 − \frac{L^2_z}{ \sin^2 \theta}} d\theta \nonumber\]
\[\Phi (\phi ) = L_z \phi \nonumber\]
Sustituyendo estos en\(W = R(r) + \Theta (\theta ) + \Phi (\phi )\) da
\[W = \sqrt{2m} \int \sqrt{ E − U(r) − \frac{L^2 }{2mr^2}} dr + \int \sqrt{ L^2 − \frac{L^2_z}{ \sin^2 \theta}} d\theta + L_z \phi \nonumber\]
La función característica de Hamilton\(W\) es la función generadora de coordenadas\((r, \theta , \phi , p_r, p_{\theta} , p_{\phi} )\) a nuevas coordenadas, que son cíclicas, y nuevos momentos que son constantes y tomados como las constantes de separación\(E, L, L_z \).
\[p_r = \frac{\partial W}{ \partial r} = \sqrt{2m} \sqrt{ E − U(r) − \frac{L^2 }{2mr^2}} \nonumber\]
\[p_{\theta} = \frac{\partial W}{ \partial \theta} = \sqrt{ L^2 − \frac{L^2_z}{ \sin^2 \theta}} \nonumber\]
\[p_{\phi} = \frac{\partial W}{ \partial \phi} = L_z \nonumber\]
Del mismo modo, usando\ ref {15.109} da las nuevas coordenadas\(E, L, L_z\)
\[\beta_E + t = \frac{\partial W}{ \partial E} = \sqrt{\frac{m}{ 2}} \int \frac{dr}{\sqrt{ E − U(r) − \frac{L^2}{ 2mr^2}}} \nonumber\]
\[\beta_L = \frac{\partial W}{ \partial L} = \sqrt{2m} \int \frac{dr}{\sqrt{E − U(r) − \frac{L^2}{ 2mr^2}}} \left( \frac{−L }{2mr^2} \right) + \int \frac{Ld\theta}{\sqrt{ L^2 − \frac{L^2_z }{\sin^2 \theta}}} \nonumber\]
\[\beta_{L_z} = \frac{\partial W}{ \partial L_z} = \int \frac{d\theta}{\sqrt{ L^2 − \frac{L^2_z}{ \sin^2 \theta}}} \left( \frac{−L}{ 2mr^2} \right) + \phi \nonumber\]
Estas ecuaciones conducen a las órbitas elípticas, parabólicas o hiperbólicas discutidas en el capítulo\(11\).
Ejemplo\(\PageIndex{5}\): Linearly-damped, one-dimensional, harmonic oscillator
Un tratamiento canónico del oscilador armónico linealmente amortiguado proporciona un ejemplo que combina el uso de lagrangianos y hamiltonianos no estándar, una transformación canónica a un sistema autónomo y el uso de la teoría Hamilton-Jacobi para resolver este sistema transformado. Muestra que la teoría de Hamilton-Jacobi puede ser utilizada para determinar directamente las soluciones para el oscilador armónico linealmente amortiguado.
Hamiltoniano no estándar:
En el capítulo\(3.5\), se dio la ecuación de movimiento para el oscilador armónico unidimensional, linealmente amortiguado para ser
\[\frac{m}{ 2} [ \ddot{q}+ \Gamma \dot{q} + \omega^2_0 q ] = 0 \tag{a}\label{a} \]
\(10.5.1\)El ejemplo mostró que tres lagrangianos no estándar dan ecuación de movimiento\(\alpha\) cuando se usan con las ecuaciones variacionales estándar de Euler-Lagrange. Uno de ellos fue el lagrangiano dependiente del tiempo Bateman [Bat31]
\[L_2 (q, \dot{q}, t ) = \frac{m}{ 2} e^{\Gamma t} [ \dot{q}^2 − \omega^2_0 q^2] \tag{b}\label{b} \]
Este lagrangiano dio el impulso generalizado para ser
\[p = \frac{\partial L^2}{ \partial \dot{q}} = m\dot{q} e^{\Gamma t} \tag{c}\label{c} \]
que se utilizó con ecuación\((15.1.3)\) para derivar el Hamiltoniano
\[H_2(q, p, t) = p\dot{q} − L_2(q, \dot{q}, t ) = e^{−\Gamma t} \frac{p^2}{ 2m} + \frac{1}{ 2} m\omega^2_0 q^2e^{\Gamma t} \tag{d}\label{d1} \]
Obsérvese que tanto el lagrangio como el hamiltoniano son explícitamente dependientes del tiempo y por lo tanto no son cantidades conservadas. Esto es como se esperaba para este sistema disipativo.
Teoría de Hamilton-Jacobi:
La forma del hamiltoniano no autónomo\ ref {d1} sugiere el uso de la función generadora para una transformación canónica a un hamiltoniano autónomo, para lo cual\(H\) es una constante de movimiento.
\[S(q, P, t) = F_2(q, P, t) = qPe^{ \frac{\Gamma t}{ 2}} = QP \tag{d}\label{d2} \]
Entonces la transformación canónica da
\[p = \frac{\partial S}{ \partial q} = P e^{\frac{ \Gamma t}{ 2}} \label{e}\tag{e} \]
\[Q = \frac{\partial S}{ \partial P} = qe^{\frac{ \Gamma t}{ 2}} \nonumber\]
Insertar esta transformación canónica en lo anterior hamiltoniano conduce al hamiltoniano transformado que es autónomo.
\[\mathcal{H}(Q, P, t) = H_2(q, p, t) + \frac{\partial F_2}{ \partial t} = \frac{P^2}{ 2m} + \frac{\Gamma}{ 2} QP + \frac{m\omega^2_0}{ 2} Q^2 \tag{f}\label{f} \]
Es decir, el hamiltoniano transformado\(\mathcal{H}(Q, P, t)\) no depende explícitamente del tiempo, y así se conserva. Expresado en las variables canónicas originales\((q, p)\), la transformada hamiltoniana\(\mathcal{H}(Q, P, t)\)
\[\mathcal{H}(Q, P, t)= \frac{p^2}{ 2m } e^{−\Gamma t }+ \frac{\Gamma }{2} qp + \frac{m\omega^2_0 }{2} q2e^{\Gamma t }\nonumber\]
es una constante de movimiento que no era fácilmente evidente cuando se utilizó el hamiltoniano original. Este resultado inesperado ilustra la utilidad de las transformaciones canónicas para resolver sistemas disipativos. La teoría Hamilton-Jacobi ahora se puede utilizar para resolver las ecuaciones de movimiento para las variables transformadas\((Q, P)\) más el hamiltoniano transformado\(\mathcal{H}(Q, P, t)\). La derivada de la función generadora
\[\frac{\partial S}{ \partial Q} = P \label{g}\tag{g} \]
Usa la Ecuación\ ref {g} para sustituir\(P\) en el Hamiltoniano\(\mathcal{H}(Q, P, t)\) (Ecuación\ ref {f}), luego el método Hamilton-Jacobi da
\[\frac{1}{2m} \left( \frac{\partial S }{\partial Q} \right)^2 + \frac{\Gamma}{ 2} Q \frac{\partial S}{ \partial Q} + \frac{m\omega^2_0}{ 2} Q^2 + \frac{\partial S}{\partial t} = 0 \nonumber\]
Esta ecuación es separable como se describe en\ ref {15.107} y así dejar
\[S(Q, \alpha , t) = W(Q, \alpha ) − \alpha t \nonumber\]
donde\(\alpha\) es una constante de separación. Entonces
\[\left[ \frac{1}{2m} \left(\frac{\partial W }{\partial Q} \right)^2 + \Gamma Q\frac{\partial W}{ \partial Q} + \frac{m\omega^2_0}{ 2} Q^2 \right] = \alpha \tag{h}\label{h} \]
Para simplificar las ecuaciones, defina la variable x como
\[x \equiv \sqrt{m\omega_0} Q \label{i}\tag{i}\]
entonces la ecuación\ ref {h} puede escribirse como
\[\left(\frac{\partial W}{ \partial x} \right)^2 + Ax\frac{\partial W}{ \partial x} + (x^2 − B ) = 0 \tag{j}\label{j} \]
dónde\(A = \frac{\Gamma}{ \omega_0}\) y\(B = \frac{2\alpha}{\omega_0}\). Asumir condiciones iniciales\(q(0) = q_0\) y\(\dot{q}(0) = 0 \)
Para este caso la constante de separación\(\alpha > 0\), por lo tanto\(B > 0\). Tenga en cuenta que la ecuación\ ref {j} es una relación algebraica simple de segundo orden, cuya solución es
\[\frac{\partial W}{ \partial x} = −\frac{\alpha x}{ 2} \pm \sqrt{B − \left[ 1 − \left(\frac{A}{ 2} \right)^2 \right] x^2} \label{k}\tag{k} \]
La elección del signo es irrelevante para este caso y así se elige el signo positivo. Hay tres casos posibles para la solución dependiendo de si el término raíz cuadrada es real, cero o imaginario.
Caso 1:\(\frac{A}{ 2} < 1\), es decir,\(\frac{\lambda }{2m\omega_0 }< 1 \)
Definir\(C = \sqrt{\left[ 1 − ( \frac{A}{ 2} )^2 \right]}\) Entonces la ecuación\ ref {k} se puede integrar para dar
\[S = −\alpha t − \frac{Ax^2}{ 4} + \int \sqrt{(B − C^2x^2)}dx \tag{l}\label{l} \]
y
\[\beta = \frac{\partial S}{ \partial \alpha} = −t + \frac{1}{ \omega_0 } \int \frac{ dx }{\sqrt{(B − C^2x^2)}} \nonumber\]
Esta integral da
\[sin^{−1} \left( \frac{Cx}{ \sqrt{B}} \right) = C\omega_0 (t + \beta ) \equiv \omega t + \delta \nonumber\]
donde
\[\omega = \omega_0 C = \omega_0 \sqrt{1 − \left( \frac{\Gamma }{2\omega_0} \right)^2} = \sqrt{ \omega^2_0 − \left(\frac{\Gamma }{2} \right)^2} \label{m}\tag{m}\]
Transformar de nuevo a la variable original\(q\) da
\[q(t) = Ge^{−\frac{ \Gamma t }{2}} \sin (\omega t + \delta ) \tag{n}\label{n}\]
donde\(G\) y\(\delta\) están dadas por las condiciones iniciales. La ecuación\ ref {m} es idéntica a la solución para el oscilador lineal amortiguado linealmente amortiguado dado anteriormente en la ecuación\((3.5.12)\).
Caso 2:\(\frac{A}{ 2} = 1\), es decir,\(\frac{\Gamma }{2\omega_0} = 1\)
En este caso\(C = \sqrt{\left[ 1 − ( \frac{A}{ 2} )^2 \right]} = 0\) y así la Ecuación\ ref {k} simplifica a
\[S = −\alpha t − \frac{Ax^2}{ 4} + x \sqrt{B} \nonumber\]
y
\[\beta = \frac{\partial S}{ \partial \alpha} = −t + \frac{x}{ \omega_0 \sqrt{B}} \nonumber\]
Por lo tanto, la solución es
\[q(t) = e^{− \frac{\Gamma t}{ 2}} (F + Gt) \label{o}\tag{o} \]
donde\(F\) y\(G\) son constantes dadas por las condiciones iniciales. Esta es la solución para el oscilador lineal amortiguado críticamente amortiguado linealmente dado anteriormente en la ecuación\((3.5.15)\).
Caso 3:\(\frac{A}{ 2} > 1\), es decir,\(\frac{\Gamma }{2\omega_0} > 1\)
Definir una constante real\(D\) donde\(D = \sqrt{\left[ ( \frac{A}{ 2} )^2 - 1\right]} = iC\), entonces
\[S = −\alpha t − \frac{Ax^2}{ 4} + \int \sqrt{(B + D^2x^2)}dx \nonumber\]
Entonces
\[\beta = \frac{\partial S}{ \partial \alpha} = −t + \frac{1}{ \omega_0 } \int \frac{dx}{\sqrt{(B + D^2x^2)}} \nonumber\]
Esta última integral da
\[\sinh^{−1} \left( \frac{Dx}{ \sqrt{B}} \right) = D\omega_0 (t + \beta ) \equiv \omega t + \delta \nonumber\]
donde
\[\omega = \omega_0C = \omega_0 \sqrt{\left( \frac{\lambda }{2m\omega_0} \right)^2 − 1} \nonumber\]
Entonces la variable original da
\[q(t) = Ge^{− \frac{\Gamma t}{ 2 }} \sinh (\omega t + \delta ) \tag{l}\label{l2} \nonumber\]
Esta es la solución clásica del oscilador armónico lineal sobreamortiguado linealmente amortiguado dado anteriormente en la ecuación\((3.5.14)\). La transformación canónica de un sistema no autónomo a uno autónomo permitió el uso de la mecánica hamiltoniana para resolver el problema del oscilador amortiguado.
Tenga en cuenta que en este ejemplo se utilizó el lagrangiano no estándar de Bateman, y el correspondiente hamiltoniano, para manejar un sistema de oscilador lineal disipativo donde la disipación depende linealmente de la velocidad. Este lagrangiano no estándar condujo a las ecuaciones correctas de movimiento y soluciones cuando se aplicaron usando el lagrangiano dependiente del tiempo o el hamiltoniano dependiente del tiempo, y estas soluciones concuerdan con las dadas en el capítulo\(3.5\) que se derivaron usando mecánica newtoniana.
Representación visual de la función de acción\(S\).
El importante papel de la integral de acción\(S\) puede iluminarse considerando el caso de una masa de un solo punto que\(m\) se mueve en un potencial independiente del tiempo\(U(r)\). Entonces la acción se reduce a
\[S(q, \alpha , t) = W(q, \alpha ) − Et \label{15.112}\]
Vamos\(q_1 = x, q_2 = y, q_3 = z, p_1 = p_x, p_2 = p_y, p_3 = p_z\). Los componentes de impulso vienen dados por
\[p_i = \frac{\partial W(q, \alpha ) }{\partial q_i} \label{15.113}\]
que corresponde a
\[\mathbf{p} = \boldsymbol{\nabla}W = \boldsymbol{\nabla}S \label{15.114}\]
Es decir, la ecuación Hamilton-Jacobi independiente del tiempo es
\[\frac{1}{2m} |\boldsymbol{\nabla}W|^2 + U(r) = E \label{15.115}\]
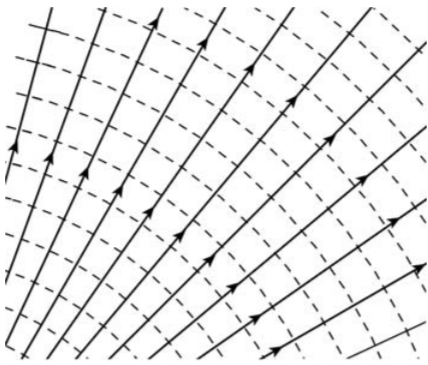
Esto implica que el momento de la partícula viene dado por el gradiente de la función característica de Hamilton y es perpendicular a superficies de constante\(W\) como se ilustra en la Figura\(\PageIndex{1}\). \(W\)Las superficies constantes son dependientes del tiempo según lo dado por la Ecuación\ ref {15.101}. Por lo tanto, si en\(t = 0\) el momento la superficie de equiacción\(S_0(q, t) = W_0(q, P_i)=0\), entonces en\(t = 1\) la misma superficie\(S_0(q, t)=0\) ahora coincide con la\(S_0(q, t) = E\) superficie, etc. Es decir, las superficies de equiacción se mueven a través del espacio por separado del movimiento de la masa de un solo punto.
La representación pictórica anterior es análoga a la situación de movimiento de un frente de onda para ondas electromagnéticas en óptica, o ondas de materia en física cuántica donde la ecuación de onda se separa en la forma\(\phi = \phi_0 e^{\frac{ iS}{ \hbar }} = \phi_0 e^{i(\mathbf{k} \cdot \mathbf{r}−\omega t)}\). El objetivo de Hamilton era crear una teoría unificada para la óptica que fuera igualmente aplicable al movimiento de partículas en la mecánica clásica. Así, la analogía óptico-mecánica de la teoría Hamilton-Jacobi ha culminado en una teoría universal que describe la dualidad onda-partícula; esta fue un Santo Grial de la mecánica clásica desde la época de Newton. Jugó un papel importante en el desarrollo de la representación Schrödinger de la mecánica cuántica.
Ventajas de la teoría Hamilton-Jacobi
Inicialmente, solo unos pocos científicos, como Jacobi, reconocieron las ventajas de la mecánica hamiltoniana. En 1843 Jacobi realizó algunos desarrollos matemáticos brillantes en la teoría de Hamilton-Jacobi que mejoraron enormemente la explotación de la mecánica hamiltoniana. La teoría Hamilton-Jacobi sirve ahora como base para la física contemporánea, como la mecánica cuántica y estadística. Una ventaja importante de la teoría Hamilton-Jacobi, en comparación con otras formulaciones de la mecánica analítica, es que proporciona una única ecuación diferencial parcial de primer orden para la acción\(S\), que es una función de las coordenadas\(n\) generalizadas\(\mathbf{q}\) y el tiempo\(t\). Los momentos generalizados ya no aparecen explícitamente en el hamiltoniano en ecuaciones\ ref {15.94},\ ref {15.95}. Nótese que el impulso generalizado no aparece explícitamente en las ecuaciones equivalentes de Euler-Lagrange de la mecánica lagrangiana, sino que éstas comprenden un sistema de ecuaciones diferenciales parciales de\(n\) segundo orden para la evolución temporal de la coordenada generalizada\(\mathbf{q}\). Las ecuaciones de movimiento de Hamilton son un sistema de ecuaciones de\(2n\) primer orden para la evolución temporal de las coordenadas generalizadas y sus momentos conjugados.
Una ventaja importante de la teoría Hamilton-Jacobi es que proporciona una formulación de la mecánica clásica en la que el movimiento de una partícula puede ser representado por una onda. En este sentido, la ecuación Hamilton-Jacobi cumplió un objetivo de larga data de la física teórica, que se remonta a Johann Bernoulli, de encontrar una analogía entre la propagación de la luz y el movimiento de una partícula. Este objetivo motivó a Hamilton a desarrollar la mecánica hamiltoniana. Una consecuencia de esta analogía onda-partícula es que el formalismo Hamilton-Jacobi ocupó un lugar destacado en la derivación de la ecuación de Schrödinger durante el desarrollo de la mecánica de onda cuántica.