
15.5: Variables de ángulo de acción
- Page ID
- 126973
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Transformación canónica
Los sistemas que poseen soluciones periódicas son una característica omnipresente en la física. El movimiento periódico puede ser ya sea una oscilación, para lo cual la trayectoria en el espacio de fase es un bucle cerrado (libración), o un movimiento rodante (rotacional) como se discute en el capítulo\(3.4\). Para muchos problemas relacionados con el movimiento periódico, el interés a menudo radica en las frecuencias del movimiento más que en la forma detallada de las trayectorias en el espacio de fase. El enfoque de la variable de ángulo de acción utiliza una transformación canónica a las variables de acción y ángulo que proporcionan un método potente y elegante para explotar la mecánica hamiltoniana. En particular, puede determinar las frecuencias de movimiento periódico sin tener que calcular las trayectorias exactas para el movimiento. Este método fue introducido por el astrónomo francés Ch. E. Delaunay (1816 − 1872) para aplicaciones a órbitas en la mecánica celeste, pero tiene aplicaciones igualmente importantes más allá de la mecánica celeste como para ligar soluciones del átomo en la mecánica cuántica.
El método de ángulo de acción reemplaza el momento en el procedimiento Hamilton-Jacobi por la integral de fase de acción para la trayectoria de bucle cerrado (libración) en el espacio de fase definido por
\[J_i \equiv \oint p_idq_i \label{15.116}\]
donde para cada variable cíclica la integral se toma a lo largo de un período completo de oscilación. La variable cíclica\(I_i\) se llama la variable de acción donde
\[I_i \equiv \frac{1}{ 2\pi} J_i = \frac{1}{ 2\pi} \oint p_idq_i \label{15.117}\]
La variable canónica a la variable de acción\(\mathbf{I}\) es la variable de ángulo\(\boldsymbol{\phi}\). Tenga en cuenta que el nombre “variable de acción” se usa para diferenciarse\(\mathbf{I}\) de la acción funcional\(S = \int Ldt\) que tiene las mismas unidades; es decir, momento angular.
El principio general subyacente al uso de variables de ángulo de acción se ilustra considerando un cuerpo, de masa\(m\), sujeto a una energía potencial conservadora unidimensional unida\(U(q)\). El hamiltoniano está dado por
\[H(p,q) = \frac{p^2}{ 2m} + U(q) \label{15.118}\]
Este sistema de encuadernación tiene un contorno de espacio de\((q,p)\) fase para cada energía\(H = E\).
\[p(q,E) = \pm \sqrt{2m(E − U(q))} \label{15.119}\]
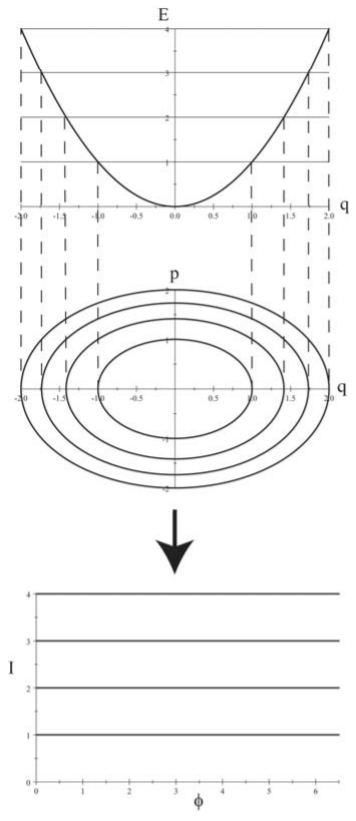
Para un sistema oscilatorio el impulso de dos valores de la Ecuación\ ref {15.119} no es trivial de manejar. Por el contrario, el área\(J \equiv \oint pdq\) del bucle cerrado en el espacio de fase es una cantidad escalar de un solo valor que depende de\(E\) y\(U(q)\). Además, el teorema de Liouville afirma que el área del contorno cerrado en el espacio de fases\(J \equiv \oint pdq\) es invariante a las transformaciones canónicas. Estos hechos sugieren el uso de un nuevo par de variables conjugadas\((\phi , I)\), donde\(I(E)\) únicamente etiqueta la trayectoria, y el área correspondiente, de un bucle cerrado en el espacio de fase para cada valor de\(E\), y la función de un solo valor\(\phi\) es un ángulo correspondiente que especifica el punto exacto a lo largo del contorno de fase-espacio como se ilustra en la Fig\(\PageIndex{1}\).
Para simplificar, considere el oscilador armónico lineal donde
\[U(q) = \frac{1}{ 2} m\omega^2q^2 \label{15.120}\]
Entonces el hamiltoniano,\ ref {15.118} es igual
\[H(p,q) = \frac{p^2 }{2m} + \frac{1}{ 2} m\omega^2q^2 \label{15.121}\]
Las ecuaciones de movimiento de Hamilton dan eso
\[\dot{p} = −\frac{\partial H}{ \partial q} = −m\omega^2q \label{15.122}\]
\[\dot{q} = \frac{\partial H}{ \partial p} = \frac{p}{ m} \label{15.123}\]
La solución de ecuaciones\ ref {15.122} y\ ref {15.123} es de la forma
\[q = C \cos(\omega (t − t_0)) \label{15.124}\]
\[p = −m\omega C \sin \omega (t − t_0) \label{15.125}\]
donde\(C\), y\(t_0\) son constantes de integración. Para el oscilador armónico, las ecuaciones\ ref {15.124} y\ ref {15.125} corresponden a los contornos elípticos habituales en el espacio de fase, como se ilustra en la Figura\(\PageIndex{1}\).
La transformación canónica de ángulo de acción implica hacer la transformación
\[(q,p) \rightarrow (\phi , I) \label{15.126}\]
donde\(I\) se define por la Ecuación\ ref {15.117} y\(\phi\) siendo el ángulo el ángulo canónico correspondiente. El enfoque lógico de esta transformación canónica para el oscilador armónico es definir\(q\) y\(p\) en términos de\(\phi \) y\(I\)
\[q = \sqrt{\frac{ 2I}{ m\omega}} \cos \phi \label{15.127}\]
\[p = \sqrt{2mI\omega } \sin \phi \label{15.128}\]
Tenga en cuenta que el soporte de Poisson es unidad
\[[q, p]_{(\phi , I)} = 1 \nonumber\]
lo que implica que la transformación anterior es canónica, y así\(I(E) \equiv \frac{1}{ 2\pi} \oint pdq \) se conserva el área de espacio de fase.
Para esta transformación canónica el hamiltoniano transformado\(\mathcal{H} (\phi , I)\) es
\[\mathcal{H} (\phi , I) = \frac{1}{ 2m } (2m\omega I) \sin^2 \phi + \frac{1}{ 2 }m\omega^2 \frac{2I}{ m\omega } \cos^2 \phi = \omega I \label{15.129}\]
Tenga en cuenta que este hamiltoniano es una constante que es independiente del ángulo\(\phi \), y así las ecuaciones de movimiento de Hamilton dan
\[\dot{ I} = −\frac{\partial \mathcal{H} (\phi , I)}{ \partial \phi} = 0 \label{15.130}\]
\[\dot{\phi} = \frac{\partial \mathcal{H} (\phi , I) }{\partial I} = \omega \label{15.131}\]
Así hemos mapeado el oscilador armónico a nuevas coordenadas\((\phi , I)\) donde
\[I = \frac{\mathcal{H} (\phi , I)}{ \omega} = \frac{E }{\omega} \label{15.132}\]
\[\phi = \omega (t − t_0) \label{15.133}\]
Es decir, el espacio de fase se ha mapeado desde elipses, con área proporcional a\(E\) en el espacio de\((q,p)\) fase, hasta un espacio de\((\phi , I)\) fase cilíndrico donde\(I = \frac{E}{\omega}\) se encuentran valores constantes que son independientes del ángulo, mientras que\(\phi\) aumenta linealmente con el tiempo. Así, las variables\((q,p)\) son periódicas con módulo\(\Delta\phi = 2\pi\).
\[q(\phi + 2\pi, I) = q (\phi , I) \label{15.134}\]
\[p(\phi + 2\pi, I) = p (\phi , I) \label{15.135}\]
El período\(\tau\) del movimiento oscilatorio periódico se da simplemente por\(\Delta\phi = 2\pi = \omega \tau\) lo cual es el resultado bien conocido para el oscilador armónico. Tenga en cuenta que la transformación canónica variable acción-ángulo ha determinado la frecuencia del movimiento periódico sin resolver la trayectoria detallada del movimiento.
El ejemplo anterior del oscilador armónico ha demostrado que, para sistemas periódicos integrables, es posible identificar una transformación canónica a\((\phi , I)\) tal que el hamiltoniano sea independiente del ángulo\(\phi\) que especifica la ubicación instantánea en el contorno de energía constante\(I\) . Si el contorno del espacio de fase es una separatriz, entonces divide el espacio de fase en regiones invariantes que contienen contornos de espacio de fase con un comportamiento diferente. Las variables de ángulo de acción no son útiles para contornos separatrices. Para el movimiento rodante, el sistema gira con un ángulo continuamente creciente o decreciente, y no hay límite natural para la variable del ángulo de acción ya que la trayectoria del espacio de fase es continua y no está cerrada. Sin embargo, el enfoque de ángulo de acción sigue siendo válido si el movimiento implica movimiento periódico así como movimiento rodante.
El ejemplo del oscilador armónico unidimensional, de un cuerpo, se puede ampliar al caso más general para muchos cuerpos en tres dimensiones. Esto se ilustra considerando múltiples sistemas periódicos para los cuales el hamiltoniano es conservador y donde las ecuaciones de la transformación canónica son separables. El momento generalizado se puede escribir entonces como
\[p_i = \frac{\partial W_i (q_i; \alpha_1, \alpha_2, ..\alpha_n)}{ \partial q_i} \label{15.136}\]
para el cual cada uno\(p_i\) es una función de\(q_i\) y las constantes de\(n\) integración\(\alpha_j\)
\[p_i = p_i (q_i, \alpha_1, \alpha_2, ..\alpha_n) \label{15.137}\]
El impulso\(p_i (q_i, \alpha_1, \alpha_2, ..\alpha_n)\) representa la trayectoria del sistema en el espacio de\((q_i, p_i)\) fases que se caracteriza por la función característica de Hamilton\(W(q,J)\). Combinando ecuaciones\ ref {15.116},\ ref {15.136} da
\[J_i \equiv \oint \frac{\partial W_i (q_i; \alpha_1, \alpha_2, ..\alpha_n)}{ \partial q_i} dq_i \label{15.138}\]
Dado que\(q_i\) es meramente una variable de integración, cada variable de acción activa\(J_i\) es una función de las\(n\) constantes de integración en la ecuación de Hamilton-Jacobi. Debido a la independencia de los pares separables-variables\((q_i, p_i)\), la\(J_i\) forma funciones\(n\) independientes de la\(\alpha_i\), y por lo tanto son adecuadas para su uso como un nuevo conjunto de momentos constantes. Así, la función característica\(W\) puede escribirse como
\[W (q_1, ...q_n; J_1, ...J_n) = \sum_j W_j (q_j ; J_1, ...J_n) \label{15.139}\]
mientras que el hamiltoniano es sólo una función del momenta\(H (J_1, .... J_n)\)
La coordenada generalizada, conjugada a\(J\), se conoce como la variable de ángulo\(\phi_i\) que se define por la ecuación de transformación
\[\phi_i = \frac{\partial W }{\partial J_i} = \sum^n_{j=1} \frac{\partial W_j (q_j ; J_1, ...J_n)}{ \partial J_i} \label{15.140}\]
La ecuación correspondiente de movimiento para\(\phi\) viene dada por
\[\dot{\phi}_i = \frac{\partial H(J) }{\partial J_i} = 2\pi\omega_i(J_1, ...J_n) \label{15.141}\]
donde\(\omega_i(J)\) son funciones constantes de las variables de acción\(J_j\) con una solución
\[\phi_i = 2\pi\omega_it + \beta_i \label{15.142}\]
es decir, son funciones lineales del tiempo. Las constantes se\(\omega_i\) pueden identificar con las frecuencias de los múltiples movimientos periódicos.
Las variables de ángulo de acción no parecen ser diferentes a un conjunto particular de coordenadas transformadas. Su mérito aparece cuando se le asigna la interpretación física\(\omega_i\). Considera el cambio\(\delta \phi_i\) como\(q_j\) se cambian infinitesimalmente
\[\delta \phi_i = \sum_j \frac{\partial \phi_i}{ \partial q_j} \partial q_j = \sum_j \frac{\partial^2 W }{\partial J_i\partial q_j } \partial q_j \label{15.143}\]
El derivado con respecto a\(q_i\) desaparece a excepción del\(W_j\) componente de\(W\). Así, la Ecuación\ ref {15.143} se reduce a
\[\delta \phi_i = \frac{\partial}{ \partial J_i} \sum_j p_j (q_j , J) dq_j \label{15.144}\]
Por lo tanto, el cambio total en\(\phi\), a medida que el sistema pasa por un ciclo completo es
\[\Delta\phi_i = \sum_j \frac{\partial}{ \partial J_i} \oint p_j (q_j , J) dq_j = 2\pi\delta_{ij} \label{15.145}\]
donde\(\frac{\partial }{ \partial J_i}\) está fuera de la integral ya que\(J_i\) son constantes para el movimiento cíclico. Así,\(\Delta\phi_i = 2\pi = \omega_i\tau_i\) ¿dónde\(\tau_i\) está el periodo para un ciclo de oscilación, donde la frecuencia angular\(\omega_i\) viene dada por
\[\frac{\omega_i}{ 2\pi} = \nu_i = \frac{1}{ \tau_i} \label{15.146}\]
Así, la frecuencia\(\nu\) asociada al movimiento periódico es la recíproca del periodo\(\tau \). El secreto aquí es que la derivada de\(H\) con respecto a la variable de acción\(J\) dada por la Ecuación\ ref {15.141} determina directamente la frecuencia del movimiento periódico sin la necesidad de resolver las ecuaciones completas del movimiento. Tenga en cuenta que el movimiento periódico múltiple puede ser representado por una expansión de Fourier de la forma
\[q_k = \sum^{\infty}_{j_1=−\infty} \sum^{\infty}_{j_2=−\infty} ... \sum^{\infty}_{j_n=−\infty} a^k_{j_1,..,j_n} e^{2\pi i(j_1\omega_1+ j_2\omega_2+ j_3\omega_3+..+ j_n\omega_n)} \label{15.147}\]
Aunque el enfoque de ángulo de acción de la teoría Hamilton-Jacobi no produce ecuaciones completas de movimiento, sí proporciona la descomposición de frecuencia que a menudo es la física de interés. La razón por la que se ha introducido aquí el poderoso enfoque variable de ángulo de acción es que se usa ampliamente en la mecánica celeste. El concepto de ángulo de acción también jugó un papel clave en el desarrollo de la mecánica cuántica, ya que Sommerfeld reconoció que la suposición ad hoc de Bohr de que el momento angular se cuantifica, podría expresarse en términos de cuantificación de la variable de ángulo como se menciona en el capítulo\(18\).
Invarianza adiabática de las variables de acción
Cuando el hamiltoniano depende del tiempo puede ser bastante difícil de resolver para el movimiento porque es difícil encontrar constantes de movimiento para sistemas dependientes del tiempo. Sin embargo, si la dependencia del tiempo es suficientemente lenta, es decir, si el movimiento es adiabático, entonces existen variables dinámicas que son casi constantes las cuales pueden ser utilizadas para resolver para el movimiento. En particular, tales constantes aproximadas son las integrales familiares de ángulo de acción. La invarianza adiabática de las variables de acción jugó un papel importante en el desarrollo de la mecánica cuántica durante la Conferencia Solvay de 1911. Esta era una época en la que los físicos estaban lidiando con los conceptos de la mecánica cuántica. Einstein utilizó el siguiente ejemplo mecánico clásico de invarianza adiabática, aplicado al péndulo simple, para ilustrar el concepto de invarianza adiabática de la acción. Este ejemplo demuestra el poder de usar variables de ángulo de acción.
Ejemplo\(\PageIndex{1}\): Adiabatic invariance for the simple pendulum
Considera que el péndulo está constituido por una masa puntual\(M\) suspendida de un pivote por una ligera cuerda de longitud\(L\) que se balancea libremente en un plano vertical. Derivar la dependencia de la amplitud de las oscilaciones\(\theta \), asumiendo que\(\theta \) es pequeña, si la cadena se acorta muy lentamente por un factor de 2, es decir, asumir que el cambio de longitud durante un periodo de la oscilación es muy pequeño. La tensión en la cuerda\(T\) viene dada por
\[T = Mg \langle \cos \theta \rangle + \left\langle \frac{ML^2 \dot{\theta}^2 }{L}\right\rangle \nonumber\]
Deje que el ángulo del péndulo sea oscilatorio
\[\theta = \theta_0 \cos(\omega t + \varphi_0) \nonumber\]
Entonces la amplitud media cuadrática media y la velocidad en un periodo son
\[\langle \theta^2 \rangle = \langle [\theta_0 \cos (\omega t + \varphi_0)]^2 \rangle = \frac{\theta^2_0}{ 2} \nonumber\]
\[\left\langle \dot{\theta}^2 \right\rangle = \langle [−\theta_0\omega \sin(\omega t + \varphi_0)]^2\rangle = \frac{\omega^2\theta^2_0}{ 2} \nonumber\]
Ya que, para el péndulo simple,\(\omega^2 = \frac{g}{L}\), entonces la tensión en la cuerda
\[T = Mg(1 − \frac{\langle \theta^2\rangle}{ 2 }) + ML \langle \dot{\theta}^2 \rangle = Mg(1 + \frac{\theta^2_0}{ 4} ) \nonumber\]
Suponiendo que\(\theta_0\) es un ángulo pequeño, y que el cambio de longitud\(−\Delta L\) es muy pequeño durante un periodo\(\tau \), entonces el trabajo realizado es
\[\Delta W = T\Delta L = −Mg\Delta L − Mg \frac{\theta^2_0}{4} \Delta L \label{a}\tag{a}\]
mientras que el cambio en la energía del oscilador interno es
\[\Delta(−Mg L \cos \theta_0) = \Delta \left[ −Mg L(1 − \frac{\theta^2_0}{2} ) \right] = −Mg\Delta L + \frac{1}{ 2} Mg\Delta( L\theta^2_0) = −Mg\Delta L + \frac{1}{ 2} Mg\theta^2_0\Delta L + Mg L\theta_0 \Delta\theta_0 \label{b}\tag{b}\]
El trabajo realizado debe equilibrar el incremento en la energía interna por lo tanto
\[L\theta_0\Delta\theta_0 + \frac{3\theta^2_0\Delta L}{ 4} = 0 \nonumber\]
o
\[L\theta^2_0\Delta \ln (\theta_0 L^{\frac{3}{ 4}} )=0 \nonumber\]
Por lo tanto se deduce que
\[(\theta_0 L^{\frac{3}{ 4}} ) = \text{ constant} \label{c}\tag{c}\]
o
\[\theta_0 \propto L^{−\frac{ 3}{ 4}} \nonumber\]
Así acortar la longitud de la cuerda de péndulo de\(L\) a\(\frac{L}{2}\) adiabáticamente corresponde a la amplitud que aumenta en un factor 1.68.
Considere la integral de ángulo de acción para un período cerrado\(\tau = \frac{2\pi}{ \omega}\) para este problema
\[J = \oint P_{\theta} d\theta \\ = \oint ML^2 \dot{\theta} \cdot \dot{\theta} dt \\ = ML^2 \langle \dot{\theta}^2 \rangle \frac{2\pi}{ \omega} \\ = \pi ML^2\theta^2_0\omega \\= \pi Mg^{\frac{1}{ 2}} \theta^2_0 L^{\frac{3}{ 2}} = \text{ constant} \nonumber\]
donde ese último paso se debe a la Ecuación\ ref {c}.
El ejemplo anterior muestra que la acción integral\(J = constant\), es decir, es invariante a un cambio adiabático. En retrospectiva este resultado es el esperado ya que se debe minimizar la integral de acción.