
17.5: Geometría del espacio-tiempo
- Page ID
- 126731
Espacio-tiempo de cuatro dimensiones
En 1906 Poincaré demostró que la transformación de Lorentz puede considerarse como una rotación en un espacio-tiempo euclidiano de 4 dimensiones introducido al agregar una cuarta coordenada espacio-tiempo imaginaria\(ict\) a las tres coordenadas espaciales reales. En 1908 Minkowski reformuló la Teoría Especial de la Relatividad de Einstein en este espacio vectorial euclidiano de espacio-tiempo de 4 dimensiones y concluyó que las variables espaciales\(q_i\)\((i = 1, 2, 3)\), donde, más el tiempo\(q_0 = ict\) son variables equivalentes y deben tratarse por igual usando una representación covariante tanto del espacio como del tiempo. La idea de utilizar un eje imaginario del tiempo\(ict\) para hacer euclidiano espacio-tiempo era elegante, pero oscureció la naturaleza no euclidiana del espacio-tiempo además de causar dificultades cuando se generalizaban a marcos aceleradores no inerciales en la Teoría General de la Relatividad. Como consecuencia, el uso del imaginario\(ict\) ha sido abandonado en la obra moderna. Minkowski desarrolló una métrica alternativa no euclidiana que trata las cuatro coordenadas\((ct, x, y, z)\) como una métrica Minkowski de cuatro dimensiones con todas las coordenadas siendo reales, e introduce explícitamente el signo menos requerido.
Análogamente a las coordenadas cartesianas tridimensionales habituales, el vector de desplazamiento cuatro\(d\mathbf{s}\) se define usando los cuatro componentes a lo largo de los cuatro vectores unitarios en los marcos de coordenadas no cebados o cebados.
\[\begin{align} d\mathbf{s} &= dx^0\mathbf{\hat{e}}_0 + dx^1\mathbf{\hat{e}}_1 + dx^2\mathbf{\hat{e}}_2 + dx^3\mathbf{\hat{e}}_3 \nonumber \\[4pt] &= dx^{\prime 0}\mathbf{\hat{e}}^{\prime}_0 + dx^{\prime 1}\mathbf{\hat{e}}^{\prime}_1 + dx^{\prime 2}\mathbf{\hat{e}}^{\prime}_2 + dx^{\prime 3}\mathbf{\hat{e}}^{\prime}_3 \label{17.31} \end{align}\]
La convención utilizada es que los subíndices griegos (covariantes) o superíndices (contravariantes) designan un cuatro vector con\(0 \leq \mu \leq 3\). Los vectores unitarios covariantes\(\mathbf{\hat{e}}_{\mu}\) se escriben con el subíndice\(\mu\) que tiene 4 valores\(0 \leq \mu \leq 3\). Como se describe en el apéndice\(19.5.3\), usando la convención de Einstein los componentes se escriben con el superíndice contravariante\(dx^{\mu}\) donde el eje de tiempo\(x^0 = ct\), mientras que las coordenadas espaciales, expresadas en coordenadas cartesianas, son\(x^1 = x\),\(x^2 = y\), y\(x^3 = z\). Con respecto a una base de vector unitario diferente (cebado)\(\mathbf{\hat{e}}^{\prime}_{\mu}\), el desplazamiento debe ser inalterado según lo dado por la Ecuación\ ref {17.31}. Además, la Ecuación\ ref {17.43} muestra que la magnitud\(|ds|^2\) del vector de desplazamiento cuatro es invariante a una transformación de Lorentz.
La transformación más general de Lorentz entre los sistemas de coordenadas inerciales\(S\) y\(S^{\prime}\), en movimiento relativo con la velocidad\(\mathbf{v}\), suponiendo que los dos conjuntos de ejes están alineados, y que sus orígenes se superponen cuando\(t = t^{\prime} = 0\), viene dada por la matriz simétrica\(\lambda\) donde
\[x^{\prime \mu} = \sum_{\nu} \lambda_{\mu\nu} x^{\nu} \label{17.32}\]
Esta transformación de Lorentz de los cuatro\(\mathbb{X}\) componentes vectoriales se puede escribir en forma de matriz como
\[\mathbb{X}^{\prime} = \boldsymbol{\lambda}\mathbb{X} \label{17.33}\]
Suponiendo que los dos conjuntos de ejes están alineados, entonces los elementos de la transformación de Lorentz\(\lambda_{ \mu \nu }\) son dados por
\[\mathbb{X}^{\prime} = \begin{pmatrix} ct^{\prime} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{pmatrix} = \begin{pmatrix} \gamma & −\gamma \beta_1 & −\gamma \beta_2 & −\gamma \beta_3 \\ −\gamma \beta_1 & 1+(\gamma − 1) \frac{\beta^2_1}{ \beta^2} & (\gamma − 1) \frac{\beta_1\beta_2}{ \beta^2} & (\gamma − 1) \frac{\beta_1\beta_3}{ \beta^2} \\ −\gamma \beta_2 & (\gamma − 1) \frac{\beta_1\beta_2}{ \beta^2} & 1+(\gamma − 1) \frac{\beta^2_2}{ \beta^2} & (\gamma − 1) \frac{\beta_2\beta_3}{ \beta^2} \\ −\gamma \beta_3 & (\gamma − 1) \frac{\beta_1\beta_3}{ \beta^2} & (\gamma − 1) \frac{\beta_2\beta_3}{ \beta^2} & 1+(\gamma − 1) \frac{\beta^2_3}{ \beta^2} \end{pmatrix} \cdot \begin{pmatrix} ct \\ x^1 \\ x^2 \\ x^3 \end{pmatrix} \label{17.34}\]
donde\(\beta = \frac{v}{ c}\) y\(\gamma = \frac{1}{\sqrt{ 1−\beta^2}}\) y asumiendo que el origen de\(S\) se transforma al origen de\(S^{\prime}\) at\((0, 0, 0, 0)\).
Para el caso ilustrado en la Figura\(17.2.1\), donde los ejes correspondientes de los dos cuadros son paralelos y en movimiento relativo con velocidad\(v\) en la\(x_1\) dirección, entonces la matriz de transformación Lorentz\ ref {17.34} reduce a
\[\begin{pmatrix} ct^{\prime} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{pmatrix} = \begin{pmatrix} \gamma & −\beta\gamma & 0 & 0 \\ −\beta\gamma & \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \cdot \begin{pmatrix} ct \\ x^1 \\ x^2 \\ x^3 \end{pmatrix} \label{17.35}\]
Esta matriz de transformación de Lorentz se llama un impulso estándar ya que solo aumenta de un fotograma a otro marco paralelo. En general, también se incorpora una matriz de rotación a la matriz de transformación\(\lambda\) para las variables espaciales.
Productos escalares de cuatro vectores
Los productos escalares de vectores y tensores suelen ser invariantes a las rotaciones en el espacio tridimensional proporcionando una manera fácil de resolver problemas. El producto escalar, o interno, de dos cuatro vectores se define por
\[\begin{align} \mathbb{X} \cdot \mathbb{Y} &= g_{\mu\nu} X^{\mu} Y^{\nu} \\[4pt] &= ( X^0 X^1 X^2 X^3 ) \cdot \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & −1 & 0 & 0 \\ 0 & 0 & −1 & 0 \\ 0 & 0 & 0 & −1 \end{pmatrix} \cdot \begin{pmatrix} Y^0 \\ Y^1 \\ Y^2 \\ Y^3 \end{pmatrix} \\[4pt] \label{17.36} &= X^0Y^0 − X^1Y^1 − X^2Y^2 − X^3Y^3 \end{align}\]
El signo correcto del producto interno se obtiene mediante la inclusión de la métrica Minkowski\(g\) definida por
\[g_{\mu\nu} \equiv \mathbf{\hat{e}}_{\mu} \cdot \mathbf{\hat{e}}_{\nu} \label{17.37}\]
es decir, puede ser representado por la matriz
\[g \equiv \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & −1 & 0 & 0 \\ 0 & 0 & −1 & 0 \\ 0 & 0 & 0 & −1 \end{pmatrix} \label{17.38}\]
La convención de signos utilizada en la métrica Minkowski, Ecuación\ ref {17.38}, ha sido elegida con la coordenada temporal\((ct)^2\) positiva que hace que\((ds)^2 > 0\) los objetos se muevan a menos de la velocidad de la luz y corresponde a\(ds\) ser reales. 1
La presencia de la matriz métrica Minkowski, en el producto interno de cuatro vectores, complica la Relatividad General y así se ha adoptado la convención de Einstein donde los componentes del contravariante cuatro vectores\(\mathbb{X}\) se escriben con superíndices\(X^{\mu}\). Véase también apéndice\(19.6\). Los componentes covariantes correspondientes de cuatro vectores se escriben con el subíndice\(X_{\mu}\) que se relaciona con los componentes contravariantes de cuatro vectores\(X^{\nu}\) utilizando el\(\mu\nu \) componente de la matriz métrica de Minkowski covariante\(\mathbf{g}\). Eso es
\[X_{\mu} = \sum^3_{\nu =0} g_{\mu\nu} X^{\nu} \label{17.39}\]
El componente métrico contravariante\(g^{\mu\nu}\) se define como el\(\mu\nu\) componente de la matriz métrica inversa\(\mathbf{g}^{−1}\) donde
\[\mathbf{gg}^{−1} = \mathbf{I} = \mathbf{g}^{−1} \mathbf{g} \label{17.40}\]
donde\(\mathbf{I}\) está la matriz de identidad de cuatro vectores. Los componentes contravariantes de los cuatro vectores pueden expresarse en términos de los componentes covariantes como
\[X^{\mu} = \sum^3_{\nu =0} g^{\mu\nu} X_{\nu} \label{17.41}\]
Así, las ecuaciones\ ref {17.39} y\ ref {17.41} se pueden utilizar para transformar entre cuatro vectores covariantes y contravariantes, es decir, para subir o bajar el índice\(\mu\).
El producto interno escalar de dos cuatro vectores se puede escribir de forma compacta como el producto escalar de un vector covariante cuatro y un vector contravariante cuatro. La matriz métrica Minkowski puede ser absorbida en cualquiera\(\mathbb{X}\) o\(\mathbb{Y}\) así
\[\begin{align} \mathbb{X} \cdot \mathbb{Y} &= \sum^3_{\mu=0} \sum^3_{\nu =0} g_{\mu v} X^{\mu}Y^{\nu} \\[4pt] &= \sum^3_{\nu =0} X_{\nu} Y^{\nu} \\[4pt] &= \sum^3_{\mu=0} X^{\mu} Y_{\mu} \label{17.42} \end{align}\]
Si esta expresión covariante es Lorentz invariante en un sistema de coordenadas, entonces es Lorentz invariante en todos los sistemas de coordenadas obtenidos por las transformaciones propias de Lorentz.
El producto interno escalar del intervalo espacio-tiempo invariante es un ejemplo especialmente importante.
\[\begin{align} (ds)^2 \equiv \mathbb{X}\cdot\mathbb{X} &= c^2 (dt)^{\mathbf{2}} − (d\mathbf{r})^2 \\[4pt] &= (cdt)^2 −\sum^3_{i=1} dx^2_i = (cd\tau)^2 \label{17.43} \end{align}\]
Esto es invariante a una transformación de Lorentz como se puede demostrar aplicando la transformación de refuerzo estándar de Lorentz dada anteriormente. En particular, si\(S^{\prime}\) es la trama restante del reloj, entonces el intervalo\(ds\) espacio-tiempo invariante viene dado simplemente por el intervalo de tiempo apropiado\(d\tau \).
Minkowski Espacio-Tiempo
La figura\(\PageIndex{1}\) ilustra una\(( ct, x^1, x^2)\) representación tridimensional del diagrama de espacio-tiempo 4−dimensional donde se supone que\(x^3 = 0\). El hecho de que la velocidad de la luz tenga una velocidad fija conduce al concepto del cono de luz definido por el locus de\(|x| = ct\).
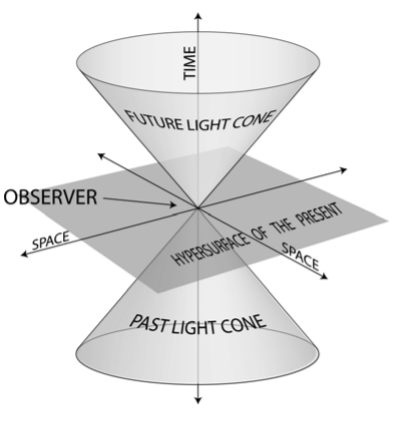
Dentro del cono de luz
El vértice de los conos representa el presente. Las ubicaciones dentro del cono superior representan el futuro, mientras que el pasado está representado por ubicaciones dentro del cono inferior. Tenga en cuenta que\((ds)^2 = c^2 (dt)^{\mathbf{2}} − (d\mathbf{r})^2 > 0\) dentro de los conos de luz tanto del futuro como del pasado. Así, el intervalo espacio-tiempo\(c\Delta t\) es real y positivo para el futuro, mientras que es real y negativo para el pasado en relación con el vértice del cono de luz. Una línea mundial es la trayectoria que sigue una partícula es una función del tiempo en el espacio Minkowski. En el interior del futuro cono de luz\(\Delta t > 0\) y, al ser real, se puede afirmar sin ambigüedades que cualquier punto dentro de este cono delantero debe ocurrir más tarde que en el vértice del cono, es decir, es el futuro absoluto. Una transformación de Lorentz puede rotar el espacio Minkowski de tal manera que el eje\(x_0\) atraviesa cualquier punto dentro de este cono de luz y luego la “línea del mundo” es puro tiempo como. De manera similar, cualquier punto dentro del cono de luz hacia atrás ocurrió sin ambigüedades antes del vértice, es decir, es pasado absoluto.
Fuera del cono de luz
Fuera del cono de luz, tiene
\[(ds)^2 = c^2 (dt)^{\mathbf{2}} − (d\mathbf{r})^2 < 0 \nonumber\]
y así\(\Delta s\) es imaginario y se llama espacio como. Una hipersuperficie de plano espacial en coordenadas espaciales se muestra para el momento actual en el fotograma no cebado. Se puede hacer una rotación en el espacio Minkowski de\(s^{\prime}\) tal manera que la hipersuperficie similar al espacio ahora se incline con respecto a la hipersuperficie mostrada y, por lo tanto, cualquier punto\(P\) fuera del cono de luz puede hacerse que ocurra más tarde, simultáneamente o antes que en el vértice dependiendo de la orientación del espacio- como la hipersuperficie. Esta situación alargadora implica que el ordenamiento temporal de dos puntos, cada uno fuera del cono de luz de los otros, puede invertirse lo que tiene profundas implicaciones relacionadas con el concepto de simultaneidad y la noción de causalidad.
Para el caso especial de dos eventos tendidos sobre el cono de luz:
\[\sum^4_{\mu} x^2_{\mu} = c^2t^2 − ( x^2_1 + x^2_2 + x^2_3 ) = 0 \nonumber\]
y así estos eventos están separados por un rayo de luz que viaja a velocidad\(c\). Solo los eventos separados por intervalos similares al tiempo se pueden conectar causalmente. La línea mundial de una partícula debe estar dentro de su cono de luz. La división de intervalos en espacio-como y tiempo, debido a su invarianza, es un concepto absoluto. Es decir, es independiente del marco de referencia.
El concepto de tiempo adecuado se puede ampliar considerando un reloj en reposo en cuadro\(S^{\prime}\) que se mueve con una velocidad uniforme\(v\) con respecto a un cuadro de reposo\(S\). El reloj en reposo en la\(S^{\prime}\) trama mide el tiempo adecuado\(\tau \), entonces el tiempo observado en el fotograma fijo se puede obtener mirando el intervalo\(ds\). Debido a la invarianza del intervalo,\(ds^2\) entonces
\[\begin{align} ds^2 &= c^2d\tau^2 \\[4pt] &= c^2dt^2 − [ dx^2_1 + dx^2_2 + dx^2_3 ] \label{17.44} \end{align}\]
Es decir,
\[\begin{align} d\tau &= dt \sqrt{ 1 − \frac{ dx^2_1 + dx^2_2 + dx^2_3 }{ c^2dt^2} } \\[4pt] &= dt \sqrt { 1 − \frac{v^2}{ c^2} } = \frac{dt}{ \gamma} \label{17.45} \end{align}\]
que es\(dt = \gamma d\tau\) lo que satisface la expresión normal para la dilatación del tiempo,\((17.3.5)\).
Momento-energía cuatro vector
La discusión previa de cuatro vectores puede explotarse elegantemente utilizando la representación espacio-tiempo covariante Minkowski. Separando el espacio y el tiempo del diferencial cuatro vector da
\[d\mathbb{X} = (cdt, d\mathbf{x}) \label{17.46}\]
Recuerde que el cuadrado del elemento espacio-tiempo de cuatro dimensiones de longitud\((ds)^2\) es invariante\ ref {17.43}, y simplemente está relacionado con el elemento tiempo apropiado\(d\tau\). Así el producto escalar
\[d\mathbb{X}\cdot d\mathbb{X} = ds^2 = c^2d\tau^2 = c^2dt^2 − [ dx^2_1 + dx^2_2 + dx^2_3 ] \label{17.47}\]
Así, el tiempo adecuado es una invariante.
La relación del elemento de cuatro vectores\(d\mathbb{X}\) y el intervalo de tiempo apropiado invariante\(d\tau\), es un cuatro vector llamado la velocidad de cuatro vectores\(\mathbb{U}\) donde
\[\mathbb{U} = \frac{d\mathbb{X}}{ d\tau} = \left( c \frac{dt}{ d\tau }, \frac{dx}{ d\tau} \right) = \gamma_u \left( c, \frac{d\mathbf{x}}{ dt} \right) = \gamma_u (c, \mathbf{u}) \label{17.48}\]
donde\(\mathbf{u}\) es la velocidad de la partícula, y\(\gamma_u = \frac{1}{\sqrt{(1 - \frac{u^2}{c^2})}}\).
El impulso de cuatro vectores se\(\mathbb{P}\) puede obtener a partir de la velocidad de cuatro vectores multiplicándolo por la masa de reposo escalar\(m\)
\[\mathbb{P} = m\mathbb{U} = (\gamma_u mc, \gamma_u m\mathbf{u}) \label{17.49}\]
Sin embargo,
\[\gamma_u mc = \frac{E}{c} \label{17.50}\]
así el vector momentum cuatro se puede escribir como
\[\mathbb{P} = \left(\frac{E}{c} , \mathbf{p} \right) \label{17.51}\]
donde el vector\(\mathbf{p}\) representa los tres componentes espaciales del momento relativista. Es interesante darse cuenta de que la Teoría de la Relatividad empareja no sólo las coordenadas espaciales y temporales, sino también, empareja sus variables conjugadas impulso lineal\(\mathbf{p}\) y energía total,\(\frac{E}{c}\).
Una característica adicional de este vector de cuatro energías momentáneas\(\mathbb{P}\), es que el producto interno escalar\(\mathbb{P} \cdot \mathbb{P}\) es invariante a las transformaciones de Lorentz y es igual\((mc)^2\) en el resto del cuadro
\[\begin{align} \mathbb{P} \cdot \mathbb{P} &= \sum^3_{\mu=0} \sum^3_{\nu =0} g_{\mu\nu} P^{ \mu} P^{\nu} \\[4pt] &= \sum^3_{\mu=0} \sum^3_{\nu =0} P_{\mu}P^{\nu} \\[4pt] &= \left(\frac{E}{c} \right)^2 − |\mathbf{p}|^2 \\[4pt] &= m^2c^2 \label{17.52} \end{align}\]
lo que lleva a la conocida ecuación
\[E^2 = p^2c^2 + E^2_0 \label{17.53}\]
La matriz de transformación de Lorentz se\(\lambda\) puede aplicar a\(\mathbb{P}\)
\[\mathbb{P} = \boldsymbol{\lambda}\mathbb{P} \label{17.54}\]
La representación invariante de cuatro vectores de Lorentz se ilustra aplicando la transformación de Lorentz que se muestra en la Figura\(17.2.1\), que da\(p^{\prime}_1 = \gamma \left(p_1 - (\frac{v}{c})^2 E \right)\),\(p^{\prime}_2 = p_2\),\(p^{\prime}_3 = p_3\), y\(E^{\prime} = \gamma (E − vp_1)\).
1 Los libros de texto más antiguos, como todas las ediciones de Marion, y las dos primeras ediciones de Goldstein, utilizan el espacio-tiempo de 4 dimensiones euclidiano Poincaré con el eje imaginario del tiempo\(ict\). Alrededor de la mitad de la comunidad científica, y los libros de texto modernos de física incluyendo este libro de texto, y la\(^{rd}\) edición 3 de Goldstein, utilizan el Bjorken - Drell\(+, −, −, −\), convención de signos dada en la Ecuación\ ref {17.38} donde\(x_0 \equiv ct\), y\(x_1, x_2, x_3\) son las coordenadas espaciales. La otra mitad de la comunidad, incluyendo matemáticos y físicos de gravitación, utilizan lo contrario\(−, +, +, +\), convención de signos. Una mayor confusión es causada por unos cuantos libros que asignan el eje de tiempo\(ct\) a ser\(x_4\) más que\(x_0\).