
7.1.2: Hipótesis
- Page ID
- 87498

Considere también las siguientes hipótesis:
La Tierra puede considerarse un marco de referencia inercial plano, no giratorio y aproximado.
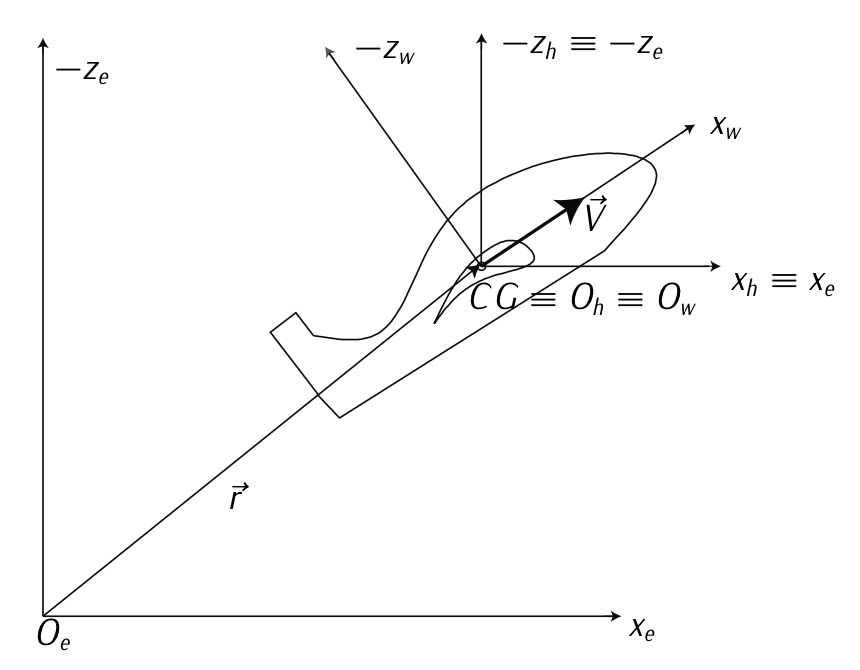
Figura 7.1: Marco de referencia de ejes de viento.
La aceleración debida a la gravedad en el vuelo atmosférico de una aeronave puede considerarse constante (\(g = 9.81[m/s^2]\)) y perpendicular a la superficie de la Tierra.
Se toma en cuenta el viento. El componente vertical es descuidado debido a su baja influencia. Solo se consideran los efectos cinemáticos, es decir, los efectos dinámicos del viento también se descuidan debido a su baja influencia.
La aeronave es considerada como un sólido rígido con seis grados de libertad, es decir, se descuida todos los efectos dinámicos asociados a deformaciones elásticas, a grados de libertad de subsistemas articulados (flaps, alerones, etc.), o al impulso cinético de los subsistemas giratorios (ventiladores, compresores, etc).
Las ecuaciones de traslación se desacoplan de las ecuaciones rotacionales asumiendo que las velocidades de rotación del avión son pequeñas y que las deflexiones de la superficie de control no afectan las fuerzas. Esto lleva a considerar un modelo dinámico de 3 grados de libertad (DOF) que describe el movimiento puntual de masa variable de la aeronave.
Suponemos que el avión es un avión a reacción convencional con motores fijos.
La aeronave se modela como partícula de masa variable.
Las acciones externas que actúan sobre una aeronave pueden descomponerse, sin pérdida de generalidad, en propulsivas, aerodinámicas y gravitacionales.
Suponemos que la aeronave tiene un plano de simetría, y que la aeronave vuela en vuelo simétrico, es decir, todas las fuerzas actúan sobre el centro de gravedad y el empuje y las fuerzas aerodinámicas se encuentran en el plano de simetría.
Asumimos que el ángulo de ataque de empuje es pequeño.