
7.1.3: Ecuaciones de movimiento de aeronaves
- Page ID
- 87514

Movimiento 3D 3
Bajo Hipótesis 7.1-7.10, las ecuaciones 3DOF que rigen el movimiento de traslación 3D de un avión son las siguientes:
• 3 ecuaciones dinámicas que relacionan fuerzas con aceleración traslacional.
• 3 ecuaciones cinemáticas que dan la posición traslacional relativa a un marco de referencia de la Tierra.
• 1 ecuación que define las características de masa variable del avión versus tiempo.
La ecuación de movimiento se define por lo tanto por el siguiente sistema de Ecuaciones Diferenciales Ordinarias (ODE):
\[m \dot{V} = T - D - mg \sin \gamma;\]
\[m V \dot{\chi} \cos \gamma = L \sin \mu;\]
\[m V \dot{\gamma} = L \cos \mu - mg \cos \gamma;\]
\[\dot{x}_e = V \cos \gamma \cos \chi + W_x;\]
\[\dot{y}_e = V \cos \gamma \sin \chi + W_y;\]
\[\dot{h}_e = V \sin \gamma;\]
\[\dot{m} = -T \eta.\]
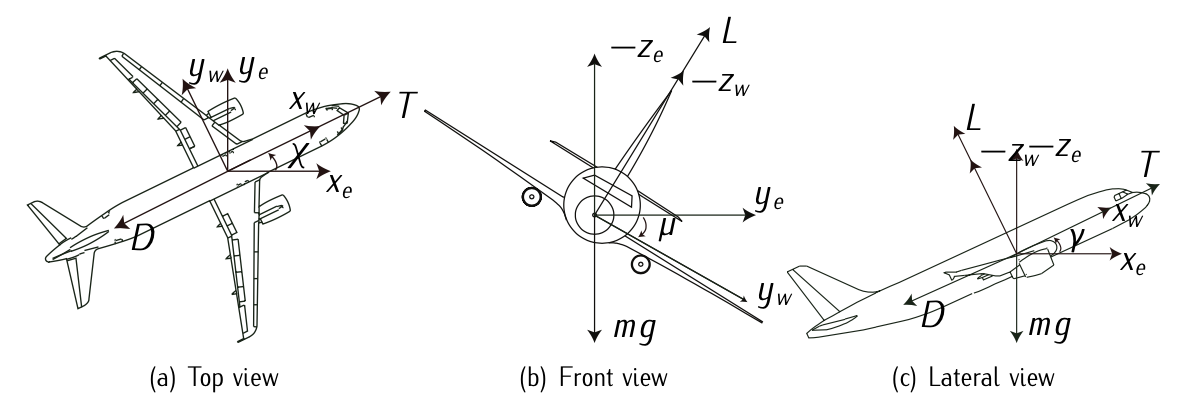
Figura 7.2: Fuerzas aéreas.
Donde en lo anterior:
- las tres igualaciones dinámicas se expresan en un marco de referencia basado en aeronaves, el sistema de ejes de viento\(F_w (O, x_w, y_w, z_w)\), generalmente\(x_w\) coincidente con el vector de velocidad.
- las tres ecuaciones cinemáticas se expresan en un marco de referencia basado en tierra, el marco de referencia de la Tierra\(F_e (O_e, x_e, y_e, z_e)\) y generalmente se denominan rango descendente (o longitud), rango cruzado (o latitud) y altitud, respectivamente.
- \(x_e, y_e\)y\(h_e\) denotan los componentes del centro de gravedad de la aeronave, el vector de radio\(\vec{r}\), expresado en un marco de referencia de la Tierra\(F_e (O_e, x_e, y_e, z_e)\).
- \(W_x\), y\(W_y\) denotan los componentes del viento,\(\vec{W} = (W_x, W_y, 0)\), expresados en un marco de referencia de la Tierra\(F_e (O_e, x_e, y_e, z_e)\).
- \(\mu, \chi\), y\(\gamma\) son el ángulo de inclinación, el ángulo de rumbo y el ángulo de trayectoria de vuelo, respectivamente.
- \(m\)es la masa de la aeronave y\(\eta\) es el consumo específico de combustible.
- \(g\)es la aceleración debida a la gravedad.
- \(V\)es la verdadera velocidad del aire de la aeronave.
- \(T\)es el empuje de los motores, la fuerza generada por los motores de la aeronave. Depende de la altitud\(h\), el número\(M\) de Mach y\(\pi\) el acelerador por una relación supuestamente conocida\(T = T(h, M, \pi)\).
- lift,\(L = C_L S \hat{q}\), y drag,\(D = C_D S \hat{q}\) son los componentes de la fuerza aerodinámica, donde\(C_L\) está el coeficiente adimensional de elevación y\(C_D\) es el coeficiente adimensional de arrastre,\(\hat{q} = \tfrac{1}{2} \rho V^2\) se conoce como presión dinámica,\(\rho\) es la densidad del aire y\(S\) es el ala húmeda superficie. \(C_L\)es, en general, una función del ángulo de ataque, número de Mach y Reynolds:\(C_L = C_L (\alpha, M, \text{Re})\). \(C_D\)es, en general, una función del coeficiente de elevación:\(C_D = C_D (C_L (\alpha, M, \text{Re}))\).
Los supuestos adicionales son:
Se supone un arrastre polar parabólico,\(C_D = C_{D_0} + C_{D_i} C_L^2\).
Una atmósfera estándar se define con\(\Delta_{ISA} = 0\).
Movimiento vertical
Considerar la hipótesis adicional para un vuelo simétrico en el plano vertical:
- \(\chi\)puede considerarse constante.
- La aeronave realiza un vuelo de ala nivelada, es decir,\(\mu = 0\).
- No hay acciones fuera del plano vertical, es decir,\(W_y = 0\).
Las ecuaciones 3DOF que rigen el movimiento vertical traslacional de un avión vienen dadas por el siguiente sistema ODE:
\[m \dot{V} = T - D - mg \sin \gamma,\]
\[m V \dot{\gamma} = L - mg \cos \gamma,\]
\[\dot{x}_e = V \cos \gamma \cos \chi + W_x,\]
\[\dot{h}_e = V \sin \gamma,\]
\[\dot{m} = -T \eta.\]
Movimiento horizontal
Considerar la hipótesis adicional para un vuelo simétrico en el plano horizontal:
Consideramos vuelo en el plano horizontal, es decir,\(\dot{h}_e = 0\) y\(\gamma = 0\).
Las ecuaciones 3DOF que rigen el movimiento horizontal traslacional de un avión vienen dadas por el siguiente sistema ODE:
\[m \dot{V} = T - D\]
\[m V \dot{\chi} = L\sin \mu,\]
\[0 = V \cos \mu - mg,\]
\[\dot{x}_e = V \cos \chi + W_x,\]
\[\dot{y}_e = V \sin \chi + W_y,\]
\[\dot{m} = -T \eta.\]
3. Se alienta al lector a leer el Apéndice A para una mejor comprensión.