
5.6: Realización del Controlador
- Page ID
- 84932

Filtros selectivos de frecuencia
Los controladores dinámicos, incluyendo phase lead, phase lag, lead-lag, PD, PI, PID, representan filtros selectivos de frecuencia que pueden ser realizados por circuitos electrónicos construidos con amplificadores operacionales y redes resistor-condensador.
Un circuito de resistencia-condensador (RC) conectado en serie o en paralelo tiene la siguiente impedancia:
Circuito RC en serie:\(Z_{\rm ser} (s)=R+\frac{1}{C\rm s} =\frac{RCs+1}{Cs}\)
Circuito RC paralelo:\(Z_{\rm par} (s)=\frac{R/Cs}{R+\frac{1}{Cs} } =\frac{R}{RCs+1}\)
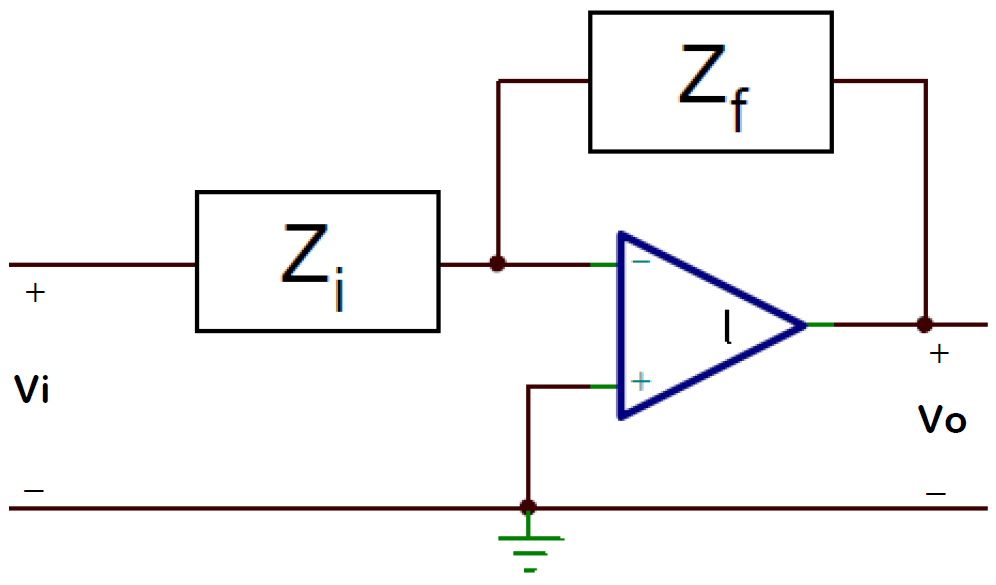
Un amplificador operacional (Op-Amp) en la configuración de inversión tiene una función de transferencia de entrada-salida:\(\frac{V_{0} (s)}{V_\rm i (s)} =-\frac{Z_\rm f (s)}{Z_\rm i (s)} ,\) donde\(Z_\rm i (s)\) y\(Z_\rm f (s)\) denota la impedancia de la ruta de entrada y retroalimentación.
Controladores de fase de plomo/retardo de fase
Un controlador de fase de primer orden o de retardo de fase se puede realizar con circuitos RC paralelos colocados como rutas de entrada y retroalimentación. La función de transferencia del controlador resultante se da como:
\[K(s)=-\frac{Z_\rm f (s)}{Z_\rm i (s)} =-\frac{R_{f} }{R_{i} } \frac{(R_\rm i C_\rm i s+1)}{(R_\rm f C_\rm f s+1)} .\]
La función de transferencia del controlador tiene un cero ubicado en:\(z_\rm c =\frac{1}{R_\rm i C_\rm i }\), y un polo en:\(p_\rm c =\frac{1}{R_\rm f C_\rm f }\).
Por lo tanto, podemos elegir\(R_{\rm i} C_{\rm i} >R_{\rm f} C_{\rm f}\) para el diseño de fase de avance y\(R_{\rm i} C_{\rm i} <R_{\rm f} C_{\rm f}\) de retardo de fase.
Para la ganancia estática y la corrección de señal, se puede emplear un circuito de amplificador operacional resistivo. El circuito tiene una ganancia de:\(\frac{V_{\rm o} }{V_\rm i } =-\frac{R_{\rm f} }{R_{\rm i} } \).
Ejemplo\(\PageIndex{1}\)
Dejar\(K(s)=\frac{5(s+1)}{s+10}=\frac{0.5(s+1)}{0.1s+1}\); entonces, la realización de la función de transferencia implica las siguientes restricciones:\(R_{\rm i} C_{\rm i} =1,\; R_{\rm f} C_{\rm f} =0.1,\; R_{\rm f} /R_\rm i =0.5.\)
Podemos elegir, por ejemplo,\(R_\rm i =100K\Omega\). Entonces,\(R_\rm f =50K\, \Omega ,\; C_\rm i =10\mu \, {\rm F},\; C_\rm f =2\mu \, {\rm F.}\;\)
Controladores PD, PI, PID
Estos controladores se pueden realizar combinando la siguiente impedancia:
\[G_{\rm PD} (s)=-\frac{R_\rm f }{Z_{\rm par} (s)} =-\frac{R_\rm f }{R_\rm i } (R_\rm i C_\rm i s+1)\]
\[G_{\rm PI} (s)=-\frac{1/C_\rm f s}{Z_{\rm par} (s)} =-\frac{1}{R_\rm i C_\rm f } \frac{(R_\rm i C_\rm i s+1)}{s}\]
\[G_{\rm PID} (s)=-\frac{Z_{\rm f-ser} (s)}{Z_{\rm i-par} (s)} =-\frac{1}{R_\rm i C_\rm f } \frac{(R_\rm i C_\rm i s+1)(R_\rm f C_\rm f s+1)}{s} .\]
Para el controlador PID, las ganancias del controlador se resuelven como funciones de los valores de los componentes:
\[\rm k_\rm p =\frac{R_{\rm f} }{R_{\rm i} } +\frac{C_{\rm i} }{C_{\rm f} } ,\; \; k_\rm i =R_{\rm f} C_{\rm i},\; \; k_\rm d =\frac{1}{R_{\rm i} C_{\rm f} }\]
Ejemplo\(\PageIndex{2}\)
Vamos\(G_{\rm PID} (s)=\frac{(s+0.1)(s+10)}{s}\); entonces, para realizar la función de transferencia con redes RC, podemos elegir, por ejemplo:
\[R_{\rm i} =100\; {\rm K}\Omega ,\; R_{\rm f} =1{\rm M}\Omega ,\; C_{\rm i} =1\; \mu \, {\rm F},\; C_{\rm f} =10\; \mu \, {\rm F}\]