
17.1: Interconexiones del sistema
- Page ID
- 85797

Las interconexiones son muy comunes en los sistemas de control. El sistema o proceso que se va a controlar -comúnmente denominado planta - puede ser el resultado de interconectar varios tipos de subsistemas en serie, en paralelo y en retroalimentación. Además, la planta está interconectada con sensores, actuadores y el sistema de control. Nuestro modelo para el sistema general representa todos estos componentes en alguna forma idealizada o nominal, y también incluirá componentes introducidos para representar incertidumbres en, o aspectos descuidados de la descripción nominal.
Comenzaremos con la interconexión de retroalimentación más simple de una planta con un controlador, donde las salidas de la planta se alimentan a un controlador cuyas propias salidas son a su vez retroalimentadas como entradas a la planta. Un diagrama de esta configuración de control de retroalimentación prototipo se muestra en la Figura 17.1.
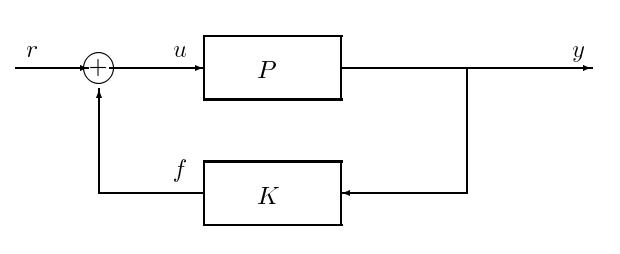
Figura\(PageIndex{1}\): Diagrama de bloques de la configuración del control de retroalimentación del prototipo.
La planta\(P\) y el controlador\(K\) podrían ser en general no lineales, variables en el tiempo e infinitas dimensiones, pero limitaremos la atención casi en su totalidad a las interconexiones de componentes LTI de orden finito, ya sean descritos en forma de espacio de estado o simplemente a través de su entrada-salida funciones de transferencia. Recordemos que las funciones de transferencia de tales modelos estado-espacio de orden finito son racionales apropiados, y de hecho son estrictamente adecuadas si no hay alimentación directa de entrada a salida. Utilizaremos la notación de los sistemas CT en el desarrollo que sigue, aunque todo se aplica por igual a los sistemas DT.
Evidentemente, la planta y el controlador deben tener dimensiones de entrada/salida compatibles; si no, entonces no pueden vincularse en un bucle de retroalimentación. Por ejemplo, si\(P (s)\) es la matriz de función de\(p \times m\) transferencia de la planta (modelo LTI nominal de la) en la Figura 17.1, entonces la función\(K(s)\) de transferencia del controlador (LTI) debe ser una\(m \times p\) matriz.
Existen todo tipo de configuraciones de retroalimentación; dos alternativas se pueden encontrar en las Figuras 17.2 y 17.3. Para nuestros propósitos en este capítulo, las diferencias entre estas diversas configuraciones no son importantes.
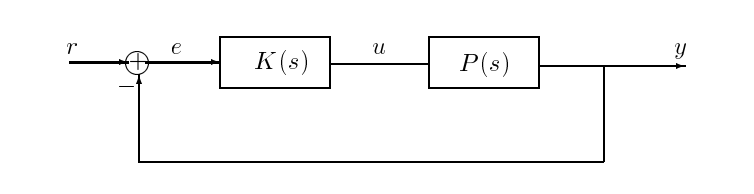
Figura\(PageIndex{2}\): Una configuración de retroalimentación (“servo”) donde el error de seguimiento entre el comando\(r\) y la salida\(y\) se aplica directamente al controlador.
Nuestra discusión por ahora se centrará en el arreglo mostrado en la Figura 17.4, que es una elaboración de la Figura 17.1 que representa algunas señales adicionales de interés. Las interpretaciones para las diversas señales (vectoriales) representadas en las figuras anteriores son normalmente las siguientes:
- \(u\)- entradas de control a la planta - entradas de control a la planta
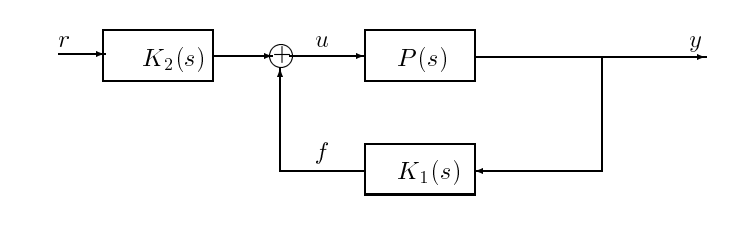
Figura\(PageIndex{3}\): Un esquema de retroalimentación de dos parámetros compensadores.
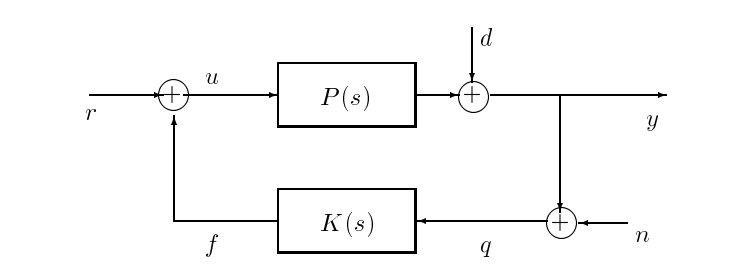
Figura\(PageIndex{4}\): Incluyendo perturbaciones de planta\(d\) y ruido de medición\(n\).
- \(y\)- salidas medidas de las plantas
- \(d\)- perturbaciones de la planta, representadas como actuando en la salida
- \(n\)- ruido en las mediciones de salida utilizadas por el controlador de retroalimentación
- \(r\)- entradas de referencia o comando
- \(e\)- error de seguimiento\(r-y\)
- \(f\)- salida del compensador de retroalimentación
Funciones de transferencia
Ahora se muestra cómo obtener las funciones de transferencia de los mapeos que relacionan las diversas señales que se encuentran en la Figura 17.4; el argumento transform\(s\),, se omite por simplicidad notacional. También nos apartamos temporalmente de nuestra convención de denotar transformaciones en mayúsculas, y marcamos las transformaciones de todas las señales en minúsculas, guardando mayúsculas para matrices de función de transferencia (es decir, transformaciones de respuestas de impulso); esta distinción ayudará al ojo a abrirse paso a través de las expresiones de abajo, y no debe causar confusión si se tiene en cuenta que todas las cantidades a continuación son transformadas. Para comenzar relacionando la salida de la planta con las diversas señales de entrada, podemos escribir
\ [\ begin {alineado}
y &=P u+d\\
&=P [r+k (y+n)] +d\\
(I-P K) y &=P r+p K n+d\\
y & =( I-P K) ^ {-1} P r+ (I-P K) ^ {-1} P K n+ (I-P K) ^ {-1} d
\ end {alineado}\ nonumber\]
Del mismo modo, la entrada de control a la planta se puede escribir como
\ [\ begin {alineado}
u &=R+k (y+n)\\
&=R+k (P u+d+n)\\
(I-K P) u &=R+k n+k d\\
u & =( I-K P) ^ {-1} r+ (I-K P) ^ {-1} K n+ (I-K P) ^ {-1} K d
\ end {alineado}\ nonumber\]
El mapa\(u \longrightarrow f\) (con el bucle de retroalimentación abierto y\(r = 0, n = 0, d = 0\) es dado por\(L = KP\), y se llama la función de transferencia de bucle.
El mapa\(d \longrightarrow y\) (con\(n = 0, r = 0\)) viene dado por\(S_{o}=(I-P K)^{-1}\) y se llama la función de sensibilidad de salida.
El mapa\(n \longrightarrow y\) (con\(n = 0, r = 0\)) viene dado por\(T=(I-P K)^{-1}P K\) y se llama la función de sensibilidad complementaria.
El mapa\(r \longrightarrow u\) (con\(d = 0, n = 0\)) viene dado por\(S_{i}=(I-K P)^{-1}\) y se llama la función de sensibilidad de entrada.
El map\(r \longrightarrow y\) (\(d = 0, n = 0\)) es dado por\((I-P K)^{-1} P\) se llama la función de respuesta del sistema.
El mapa\(d \longrightarrow u\) (con\(n = 0, r = 0\)) viene dado por\((I-K P)^{-1} K\)
Tenga en cuenta que la función de transferencia también se\((I-K P)^{-1} K\) puede escribir como\(K(I-P K)^{-1}\), como se puede probar reordenando la siguiente identidad:
\[(I-K P) K=K(I-P K)\nonumber\]
De igual manera la función de transferencia se\((I-P K)^{-1} P\) puede escribir como\(P (I-K P)^{-1}\).
Tenga en cuenta también que las funciones de sensibilidad de salida y sensibilidad de entrada son diferentes, ya que, a excepción del caso cuando\(P\) y\(K\) son ambas de entrada única, salida única (SISO), tenemos
\[(I-K P)^{-1} \neq(I-P K)^{-1}\nonumber\]