
17.6: Ejercicios
- Page ID
- 85786

Ejercicio 17.1
\(P(s)=e^{-2 s}-1\)Déjese conectar en una configuración de retroalimentación de unidad. ¿Está bien planteado este sistema?
Ejercicio 17.2
Supongamos que\(P_{\alpha\) y\(K\) en el diagrama están dados por:
\ [P_ {\ alpha} (s) =\ left (\ begin {array} {cc}
\ frac {s} {s+1} &\ frac {-\ alpha} {s+1}\
\ frac {1} {(s+1)} &\ frac {1} {s+1}
\ end {array}\ right),\ quad\ alpha\ in\ mathbb {R},\ cuádruple K (s) =\ left (\ begin {array} {cc}
\ frac {s+1} {s (s+5)} & 0\\
-\ frac {s+1} {s (s+5)} &\ frac {s+1} {s+5}
\ end {array}\ derecha)\ nonumber\]
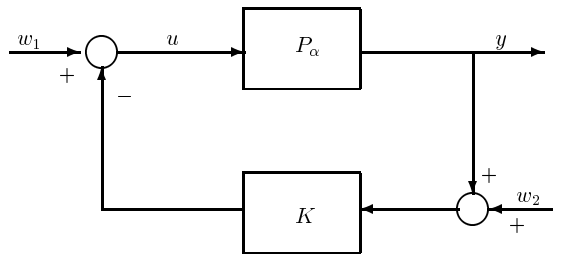
- ¿El sistema de bucle cerrado es estable para todos\(\alpha > 0\)?
- ¿El sistema de bucle cerrado es estable para\(\alpha = 0\)?
Ejercicio 17.3
Considere el servo loop estándar, con
\[P(s)=\frac{1}{10 s+1}, \quad K(s)=k\nonumber\]
pero sin ruido de medición. Encuentra la ganancia menos positiva de tal manera que las siguientes sean todas ciertas:
- El sistema de retroalimentación es internamente estable.
- Sin perturbaciones en la salida de la planta\((d(t) \equiv 0)\), y con un paso de unidad en la señal de comando\(r(t)\), el error\(e(t) = r(t) - y(t)\) se establece en\(|e(\infty)| \leq 0.1\).
- \(\mathcal{L}_{2}\)Demostrar que la norma a\(\mathcal{L}_{\infty}\) inducida de un sistema SISO viene dada por\(\mathcal{H}_{2}\) norma del sistema.
- Con comando cero\((r(t) \equiv 0),\|y\|_{\infty} \leq 0.1\) para todos\(d(t)\) esos\(\|d\|_{2} \leq 1\). [AGREGAR NUEVO PROBLEMA]
Ejercicio 17.4 Parametrización de Controladores Estabilizadores
Considere el diagrama que se muestra a continuación donde\(P\) se encuentra una planta estable dada. Mostraremos una forma sencilla de parametrizar todos los controladores estabilizadores para esta planta. Tanto la planta como los controladores son de dimensiones finitas.
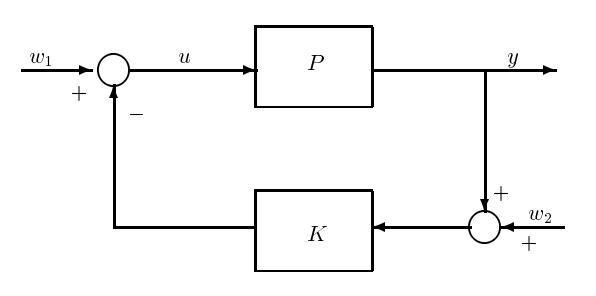
1. Mostrar que el controlador de retroalimentación
\[K=Q(I-P Q)^{-1}=(I-Q P)^{-1} Q\nonumber\]
para cualquier racional estable\(Q\) es un controlador estabilizador para el sistema de bucle cerrado
2. Demuestre que cada controlador estabilizador es dado por\(K=Q(I-P Q)^{-1}\) para algunos estables\(Q\). (Pista: Expresar\(Q\) en términos de\(P\) y\(K\)).
3. Supongamos que\(P\) es\(w_{1}\) SISO, es un paso, y\(w_{2} = 0\). Qué condiciones\(Q\) tienen que satisfacer para que el valor de estado estacionario\(u\) de sea cero. ¿Siempre es posible satisfacer esta condición?
Ejercicio 17.5
Considera el diagrama de bloques que se muestra en la siguiente figura.
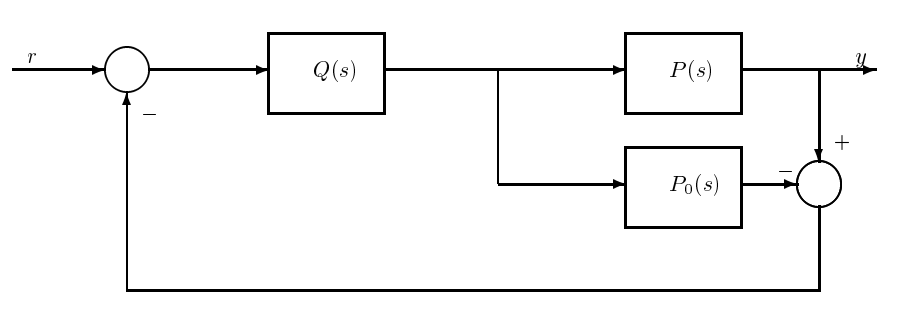
(a) Supongamos\(P(s)=\frac{2}{s-1}\),\(P_{0}(s)=\frac{1}{s-1}\) y\(Q = 2\). Calcular la función de transferencia de\(r\) a\(y\).
b) ¿El sistema anterior es internamente estable?
(c) Ahora supongamos que\(P (s) = P_{0}(s) = H(s)\) para algunos\(H(s)\). ¿Bajo qué condiciones\(H(s)\) es el sistema internamente estable para cualquier estable (pero por lo demás arbitrario)\(Q(s)\)?
Ejercicio 17.6
Considera el sistema que se muestra en la siguiente figura.
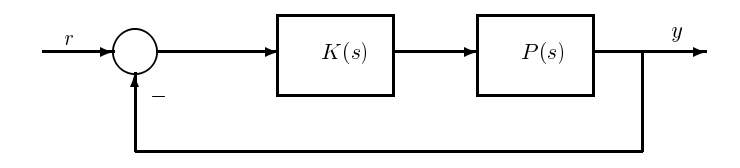
Se sabe que la función de transferencia de plantas viene dada por:
\ [P (s) =\ left [\ begin {array} {cc}
\ frac {s-1} {s+1} & 1\\
0 &\ frac {s+1} {s+2}
\ end {array}\ derecha]\ nonumber\]
Un ingeniero de control diseñó el controlador de\(K(s)\) tal manera que la función de transferencia de bucle cerrado de\(r\) a\(y\) es:
\ [H (s) =\ left [\ begin {array} {cc}
\ frac {1} {s+4} & 0\\
0 &\ frac {1} {s+4}
\ end {array}\ derecha]\ nonumber\]
(a) Cómputos\(K(s)\).
(b) Calcular los polos y ceros (con direcciones cero de entrada asociadas) de\(P (s)\) y\(K(s)\).
c) ¿Hay cancelaciones polo/cero entre\(P (s)\) y\(K(s)\)?
d) ¿El sistema es internamente estable? Verifica tu respuesta
Ejercicio 17.7
Un ingeniero quería estimar la ganancia pico a pico de un sistema de bucle cerrado\(h\) (el mapa de entrada-salida). El controlador fue diseñado para que el sistema rastrea una entrada de paso en estado estacionario. El diseñador simuló la respuesta escalonada del sistema y calculó la cantidad de sobreimpulso\((e_{1})\) y subimpulso\((e_{2})\) de la respuesta. Enseguida concluyó que
\[\|h\|_{1} \geq 1+2 e_{1}+2 e_{2}\nonumber\]
¿Es esta una conclusión correcta? Verificar