
17.5: Obtención de Estabilidad y Desempeño- Una Vista Previa
- Page ID
- 85785

En las conferencias venideras nos preocuparemos por desarrollar herramientas de análisis y síntesis para estudiar la estabilidad y el rendimiento ante la presencia de incertidumbre de la planta y perturbaciones del sistema.
Estabilización
La estabilización es el primer requisito en el diseño de control - sin estabilidad, ¡uno no tiene nada! Hay dos nociones relevantes de estabilidad:
(a) estabilidad nominal (estabilidad en ausencia de errores de modelado), y
(b) estabilidad robusta (estabilidad en presencia de algunos errores de modelado).
En las secciones anteriores, hemos demostrado que el análisis de estabilidad de un sistema de retroalimentación interconectado requiere verificar la estabilidad del operador de bucle cerrado,\(\mathcal{T}(P, K)\). En el caso donde
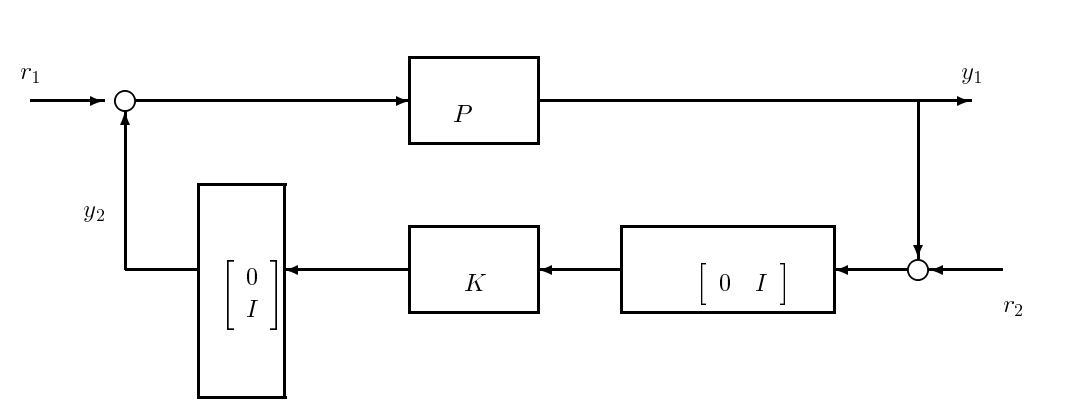
Figura\(\PageIndex{1}\): Una configuración de retroalimentación más general.
hay errores de modelado, tal verificación tiene que hacerse para cada posible perturbación del sistema. Son necesarios métodos eficientes para realizar esta comprobación para clases específicas de errores de modelado.
Especificaciones de desempeño de reuniones
Las especificaciones de desempeño (una vez que se ha asegurado la estabilidad) incluyen rechazo de perturbaciones, seguimiento de comandos (es decir, seguimiento) y rechazo de ruido. Nuevamente, consideramos dos nociones de rendimiento:
(a) rendimiento nominal (desempeño en ausencia de errores de modelado), y
(b) desempeño robusto (desempeño en presencia de errores de modelado).
Muchas de las especificaciones de rendimiento que uno puede querer imponer a un sistema de retroalimentación se pueden clasificar bajo los siguientes dos tipos de especificaciones:
1. Rechazo de perturbaciones Esto corresponde a minimizar el efecto de las entradas exógenas\(w\) sobre las variables reguladas\(z\) en la descripción general de 2 entradas y 2 salidas, cuando las entradas exógenas son solo parcialmente conocidas. Para abordar este problema, es necesario proporcionar un modelo para las variables exógenas. Una posibilidad es asumir que\(w\) tiene energía finita pero por lo demás se desconoce. Si deseamos minimizar la energía en lo\(z\) producido por esto\(w\), podemos plantear la tarea de desempeño como involucrando la minimización de
\[\sup _{w \neq 0} \frac{\|\Phi w\|_{2}}{\|w\|_{2}}\nonumber\]
donde\(\Phi\) esta el mapa relativo\(w\) a\(z\). Esta es solo la raíz cuadrada de la ganancia energía-energía, y se mide por la\(\mathcal{H}_{\infty}\) -norma de\(\Phi\).
Alternativamente, si\(w\) se supone que tiene una magnitud de pico finita, y estamos interesados en la magnitud pico de la salida regulada\(z\), entonces la medida del rendimiento viene dada por la ganancia pico-pico del sistema, que se mide por la `\(l_{1} / \mathcal{L}_{1}\)-norma de\(\Phi\). Se pueden considerar otras alternativas como la amplificación de potencia-potencia.
Un enfoque bastante diferente, y bastante potente en la configuración lineal, es modelar\(w\) como un proceso estocástico (por ejemplo, proceso de ruido blanco). Al medir la varianza de\(z\), obtenemos una medida de rendimiento en\(\Phi\).
2. Especificaciones de Entrada Fija. Estas especificaciones se basan en un comando específico o trayectoria nominal. Uno puede, por ejemplo, especificar una plantilla en el dominio del tiempo dentro de la cual se requiere que la salida permanezca para una clase dada de entradas. Las especificaciones familiares como el sobreimpulso, el subimpulso y el tiempo de asentamiento para una entrada de paso caen en esta categoría.
Finalmente, se deben desarrollar las condiciones para verificar si un sistema cumple con una medida de desempeño dada en presencia de errores de modelado prescritos. Estos temas serán revisitados más adelante en este curso.