
19.1: Representación aditiva de la incertidumbre
- Page ID
- 85737

Comúnmente se da el caso de que el modelo nominal de planta es bastante preciso para frecuencias bajas pero se deteriora en el rango de alta frecuencia, debido a parásitos, no linealidades y/o efectos variables en el tiempo que se vuelven significativos a frecuencias más altas. Estos efectos de alta frecuencia pueden haberse dejado sin modelar porque el esfuerzo requerido para la identificación del sistema no estaba justificado por el nivel de desempeño que se buscaba, o bien pueden ser efectos bien entendidos que se omitieron del modelo nominal porque eran incómodos y poco manejables para llevar adelante durante el diseño de control. Este problema, a saber, el deterioro de los modelos nominales a frecuencias más altas, se ve mitigado en cierta medida por el hecho de que casi todos los sistemas físicos tienen funciones de transferencia estrictamente adecuadas, de manera que la ganancia del sistema comienza a rodar a alta frecuencia.
En la situación anterior, con un modelo nominal de planta dado por la función de transferencia adecuada P0 (s), la planta real representada por\(P (s)\), y la diferencia\(P (s) - P_{0}(s)\) que se supone que es estable, podemos caracterizar la incertidumbre del modelo a través de un límite de la forma
\[\left|P(j \omega)-P_{0}(j \omega)\right| \leq \ell_{a}(\omega) \ \tag{19.1}\]
donde
\ [\ ell_ {a} (\ omega) =\ izquierda\ {\ comenzar {alineado}
\ texto {“Pequeño”} &; |\ omega|<\ omega_ {c}\\
\ text {“acotado”} &;\ quad|\ omega|>\ omega_ {c}
\ end {alineado}\ derecho.\\ tag {19.2}\]
Esto dice que la respuesta de la planta real radica en una “banda” de incertidumbre en torno a la de la planta nominal. Observe que en esta descripción no se incorpora información de fase sobre el error de modelado. Por esta razón, puede llevar a resultados conservadores.
La descripción anterior sugiere la siguiente caracterización aditiva simple del conjunto de incertidumbre:
\[\Omega_{a}=\left\{P(s) \mid P(s)=P_{0}(s)+W(s) \Delta(s)\right\} \ \tag{19.3}\]
donde\(\Delta\) es una función de transferencia estable arbitraria que satisface la condición de norma
\[\|\Delta\|_{\infty}=\sup _{\omega}|\Delta(j \omega)| \leq 1 \ \tag{19.4}\]
y el término estable de ponderación racional adecuada\(W(s)\) se utiliza para representar cualquier información que tengamos sobre cómo varía la precisión del modelo de planta nominal en función de la frecuencia. La Figura 19.1 muestra la representación aditiva de la incertidumbre en el contexto de un servo bucle estándar, con\(K\) denotando el compensador.
Cuando la incertidumbre de modelado aumenta con la frecuencia, tiene sentido usar una función de ponderación\(W(j \omega)\) que se vea como un filtro de paso alto: pequeña magnitud a bajas frecuencias, aumentando pero acotada a frecuencias más altas.
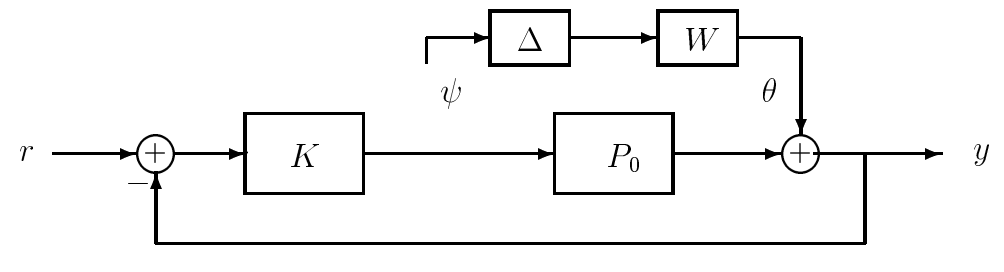
Figura 19.1: Representación de la planta real en un bucle servo a través de una perturbación aditiva de la planta nominal.
Precaución: La formulación anterior de una perturbación de modelo aditivo no debe interpretarse como diciendo que la planta real o perturbada es la combinación paralela del sistema nominal\(P_{0}(s)\) y un sistema con función de transferencia\(W(s) \Delta(s)\). Más bien, la planta real debe considerarse como una realización mínima de la función de transferencia\(P (s)\), que pasa a estar escrita en forma aditiva\(P_{0}(s)+W(s) \Delta(s)\).
Algunas características del conjunto de incertidumbre anterior son dignas de destacar:
- Los polos inestables de todas las plantas del conjunto son precisamente los del modelo nominal. Por lo tanto, se supone que nuestros esfuerzos de modelado e identificación son lo suficientemente cuidadosos como para capturar con precisión los polos inestables del sistema.
- El conjunto incluye modelos de orden arbitrariamente grande. Así, si las incertidumbres de mayor preocupación para nosotros fueran incertidumbres paramétricas, es decir, incertidumbres en los valores de los parámetros de un modelo particular (por ejemplo, estado-espacio), entonces el conjunto de incertidumbre anterior sobreestimaría en gran medida el conjunto de plantas de interés para nosotros
Los métodos de diseño de control que desarrollaremos producirán controladores que están garantizados para trabajar para cada miembro del conjunto de incertidumbre de la planta. Dicho de manera ligeramente diferente, nuestros métodos tratarán al sistema como si cada modelo en el conjunto de incertidumbre fuera una posible representación de la planta. En la medida en que no todos los miembros del conjunto sean posibles modelos de planta, nuestros métodos serán conservadores.
Supongamos que tenemos un conjunto de plantas posibles de\(\Pi\) tal manera que la verdadera planta es miembro de ese conjunto. Podemos intentar incrustar este conjunto en una estructura de perturbación aditiva. Primero deje\(P_{0} \in \Pi\) ser una cierta planta nominal en\(\Pi\). Para cualquier otra planta\(P \in \Pi\) escribimos,
\[P(j \omega)=P_{0}(j \omega)+W(j \omega) \Delta(j \omega)\nonumber\]
El peso\(|W(j \omega)|\) satisface
\ [\ begin {alineado}
|W (j\ omega) | &\ Geq|W (j\ omega)\ Delta (j\ omega) |=\ izquierda|P (j\ omega) -P_ {0} (j\ omega)\ derecha|\\
|W (j\ omega) | &\ geq\ max _ {P\ in\ Pi}\ izquierda|P (j\ omega) -P_ {0} (j\ omega)\ derecha|=\ ell_ {a} (j\ omega)
\ final {alineado}\ nonumber\]
Con el conocimiento del límite inferior\(l_{a}(j \omega)\), encontramos un sistema estable\(W(s)\) tal que\(|W(j \omega)| \geq \ell_{a}(j \omega)\)