
2.1: Definición de un sistema
- Page ID
- 84289

En definitiva, un sistema es cualquier proceso o entidad que tenga una o más entradas bien definidas y una o más salidas bien definidas. Ejemplos de sistemas incluyen un simple objeto físico que obedece a la mecánica newtoniana, ¡y la economía estadounidense! Los sistemas pueden ser físicos, o podemos hablar de una descripción matemática de un sistema. El objetivo de modelar es capturar en una representación matemática el comportamiento de un sistema físico. Como veremos, dicha representación se presta al análisis y al diseño, y ciertas restricciones como la linealidad y la invarianza temporal abren un enorme conjunto de herramientas disponibles.
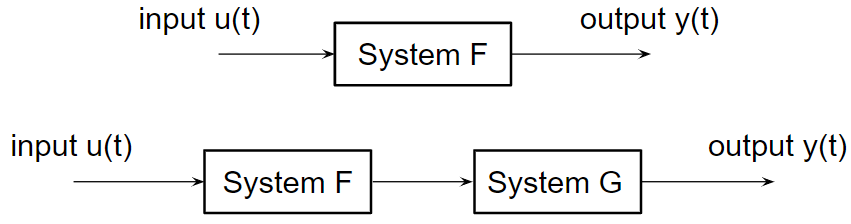
A menudo usamos una forma de diagrama de bloques para describir los sistemas, y en particular sus interconexiones:
.png)
En el segundo caso mostrado en la Fig. 2.1.1,\(y(t) = G[F[u(t)]]\).
Mirando la estructura ahora y comenzando por el caso más abstracto y general, podemos escribir un sistema como una función relacionando la entrada con la salida; como se escribe estas son ambas funciones del tiempo:
\[y(t) = F[u(t)] \nonumber\]
El sistema capturado en\(F\) puede ser una multiplicación por algún factor constante - un ejemplo de un sistema estático, o un conjunto irremediablemente complejo de ecuaciones diferenciales - un ejemplo de un sistema dinámico. Si estamos hablando de un sistema dinámico, entonces por definición el mapeo de\(u(t)\) a\(y(t)\) es tal que el valor actual de la salida\(y(t)\) depende de la historia pasada de\(u(t)\). Los siguientes son varios ejemplos:
\[y(t) = \int\limits_{t-3}^{t} u^2(t_1)\, dt_1 \nonumber\]
\[y(t) = u(t) + \sum_{n=1}^N u(t - n \delta t) \nonumber\]
En el segundo caso,\(\delta t\) es un paso de tiempo constante, y por lo tanto\(y(t)\) ha incrustado en él la entrada de corriente más un conjunto de versiones\(N\) retardadas de la entrada.