
12.3: Diseño para Rendimiento Nominal
- Page ID
- 84154

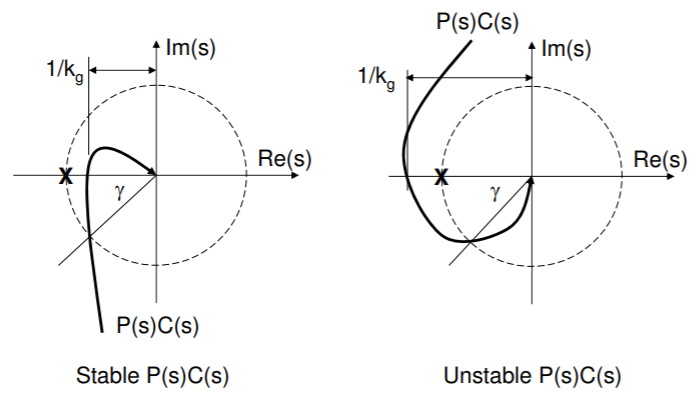
Los requisitos de rendimiento de un controlador de retroalimentación, utilizando el modelo de planta nominal, se pueden fundir en términos de la parcela de Nyquist. Dado que la función de sensibilidad mapea\(r(s)\) la entrada de referencia al error de seguimiento\(e(s)\), sabemos que\(|S(s)|\) debe ser pequeña a bajas frecuencias. Por ejemplo,
.png)
si se va a mantener el seguimiento del uno por ciento para todas las frecuencias por debajo\(\omega = \gamma\), entonces\(|S(s)| = < 0.01, \, \forall \omega < \gamma.\) Esto se puede formalizar escribiendo
\[ |W_1(s) S(s)| < 1, \]
donde\(W_1(s)\) es una función de ponderación estable de frecuencia. Para forzar\(S(s)\) a ser pequeño a bajo\(\omega\),\(W_1 (s)\) debe ser grande en el mismo rango. El requisito\(|W_1(s) S(s)| < 1\) es equivalente a\(|W_1(s)| < |1 + P(s)C(s)|\), y esta última condición puede interpretarse como: Los loci de\(P(s)C(s)\) deben permanecer fuera del disco de radio\(W_1(s)\), el cual es estar centrado en el punto crítico\((-1 + 0j)\). El disco va a ser bastante grande, posiblemente infinitamente grande, a las frecuencias más bajas.